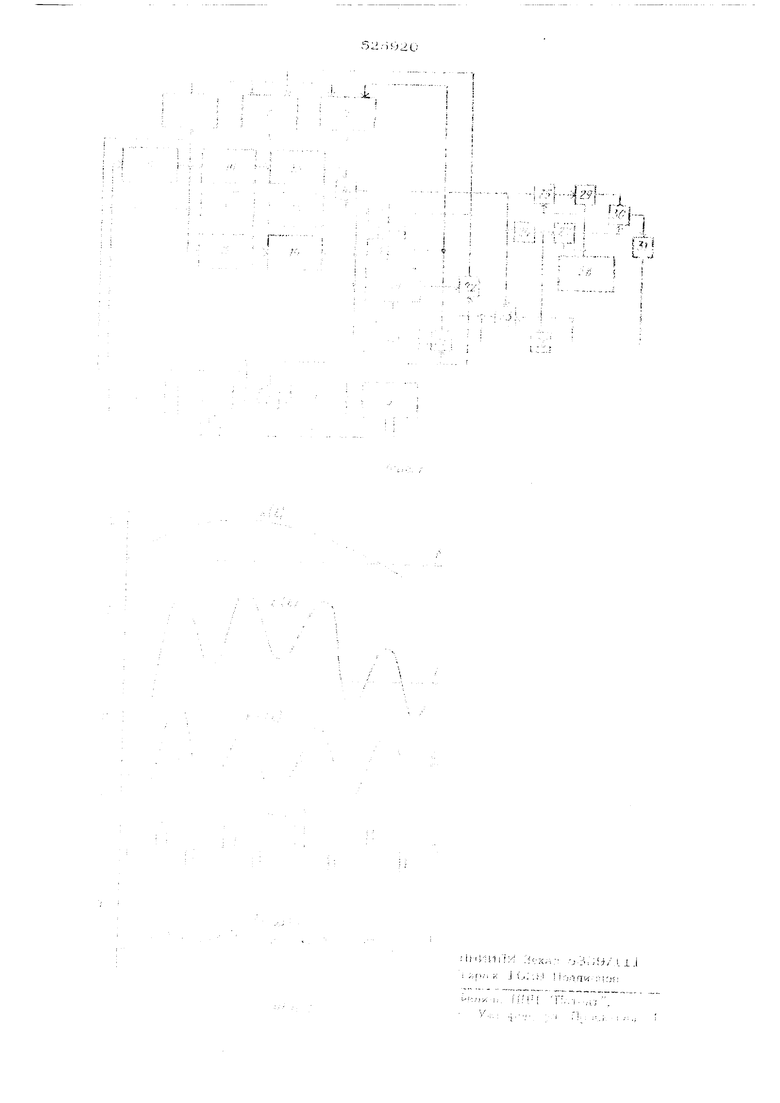
пом:- ;.-.oi;:.jft элемент---ч; йхопо.: TpeTbii: сумматора, причем выход ijoxbего суклма-; р-:5 чорео зтррой нул7,- -срхан подключен к управляющим в.чодам третьего и четвертого ключей, выхол второго сумматора также через третр)й ключ и чаре-з м:аследаБатольно включенные яиве;:)-тор и чегБе|ГГ(1й ключ подключен к управ-.(яющим ил:лм.лм первого к второго генера( -о. pfJw п M,/J о of |-1 ,чзн о I о н а Г1р а вл е кий. вьг х, оды котор.их ;г;.if-1чОчены :к. uefvebtM входам четoipTiJi-o и liiT-iTo г:умматорО1з соотвегстБенн :.УГОр( i-,i IiM f.-т ;,i.i(:,i;j иОДК.;1ЮчеыЫ К ВЫХО- :i.y чу :.i ifu:. ;.. Г) йлемопта, а выходы ОСТ ,, Oi О ii l(.;VOi-) С/ММаТ Г;|)ОВ ПОДКЛЮЧвН :-. о 3г fii:5).n.-i iJ ;;c;M иорвого и Вгорог-о .ксг;-:,-:.: гоотвотствйНТЮ, управляю:.. i) 1.Ч1-; lit ii , tiSopoio И тротьего aai , iu}.iii,. ..iCM.ei-nCa iIoaKJiroiGbbi к выходу ;..; Jii/i |1ОИО:;/| ООЯ. I Ir- (||И L .v-iiia Oi тК-схемс: проллагв.емо :;; 14 ,;i.: .:i, .-Цич - ;кс)го управлвния м i v.u/ic:;KiiT оацаклцее устройство 1 ,:. : - :,.,:.:, элемвнт 2, первый сумма:: ( Л yiif) 4, объект управлен -. ii;iiJb-iv - |;;,:иый инвертор 7, vjepBoe 8 i- r.TiJ|ii)( .1 у( I lOHcif.iH ::ргтвнепия. ( ц ,i;;-i;;i . 1 блокк г)ироделения молуля, ../i i;M.iji ji у ;)рган 12, первый 13 и второй i .)щие фильтры, блок задержки Ч :зто|)оп с:умматор в, первый и второй u Kin-i 17 я 18, 1ч,нераторьг 10,2О пино i,l.:iЧ Н. U j iVi Ж ОН ИЯ, НеТВе()Т1.)Й 2 11 liVJ-Г1-Й .-2. СуММОТОрЫ, третий К1ИСЧ 2, R г,;)..;io;i илинргор 24, первый запоминающий эле .. 2.5, че1ве|1тый ключ 26, второй аапо- 11ПИЙ -.1емент 27, мультивибратор 28, | --тиГч запоминающий элемент 29, yN.i;..ieго| 30, гггорпй (ну||.г,О|)|-ан -31, Ма фиг . 2 даны временные диаграммы рабогь.) Системы автоматпческото управле™ HiiK; ),це а ..- кривая задающего воадейст-. ви11 (А(|-),б кривая линамичепкой ошпби.п . :;нойпой i-irrevi ii (t , Л .. - рквоа .т--Г|«,;. разности i.niif, I - корректирующие ;.1.-П1уЛЬСЫ М ).i.fp( (: ) , Д -.- К.рИБ.Ч ,.И ЦЯ ХГЯ.еС;.X ой О11и5ки лorlp кти кнlaя oй П|.:.-и1.;|;:й1 Ой (.j С,.,,,,,,Д i ) . Т|х-;д, ага8мвя г;истсма работает с.игду-. . обра.зом. Пусть напрпме), .i-;.. у||ра злен1-:.я 5 (фиг . 1 ) лолжеп с в-лгокой , ( ччглежипать ц;1иж(Ч:1ио задающего У( ai .око;;Т г фиг. а.. (.:и ..i.i , :j lio углу И При слемеими /TSiiifiM,: ЧО-. о.иибки, величина и форма KOfop vj ..-,HiiCiiT iT siiaa управляющего воз;гс-;й i ;..ия параметров системы- При глад- крд« у:граБ.ляк«иом. воздействии на диквмичео куК oii.iHioKy ;;;:;.й...а;1ьшаегси к.о;;ебательная со тапляюгча. ooyc:: ; №ietiHoH ;йлич;-1ОМ нелишни ногтей редуктор;) гмпя лкхЬт, .зона нечувств; ii I . пос I,f 11 др. На фиг. 26 при ei 1 -t-i „jjfirpaMMa динамической 1 п тчгт н ГИг-еЙг-о;; ГЧСТОМЫ f,(t). ,Цяя уменьшения динамической ошибки Е ; помошью фильтра 6 выделяют кбл е ба тел i, ну }О г; ос та BJI яюшую д инамическ ой оишбки и;:темы t р Г i: ) , т.е. сигнал раз- (.ГОСТ:-, (см. фи;г, 2в), инвертирует ее с помош.,ю инвертора 7 и в момент возникно- веняи сигнолй раамости положительной поляр.ности устройством сравнения 8 в блок управления 4 через сумматор 3 подается поло.жите-;ьный корректируюяшй импульс, а э момент ооокикновения сигнала разностк отрицательной псмшрности устройством сравнения Э подается отрицательный корроктирукхний импульс (см. фиг, 2г). Эти импульсы, nocTyii.-Jii в блок упраш/ения 4, ае только ггротииодейстиуют отклонению объек-. та зтрлЕ.денкя: 5., ш-.1ав.йкному кгхпебатьльHfeSM ripoiiuccoM, i;o и умоньшают саму динамичес;11у о ошибку системы.. Уменьшение дии:1мичес к ой ouiH&KH ciiCTt-мы достигает-. ся тем, чГо диытб льносттл коррексируюшег-о импульса зависит от вел1лчины суммы стаженного -год.уля г олсба гольной сосг иьляющий ошибки У: .(noro .-.год.уля ди);амической о;пибки. Ллйтельность ; орректирующил импульсов определяется с тедующим образом. В момент воз и;шовекия сигнала разности нуль ор1аном. 1 2 через блок задержки 1 5 включают генераГОр 1У пи.м о образного ( отри1 атйчьноj-o) напря.5Н0Й1 .знак сигнала разности положителен, или генератор пилообраз«oiO (положите...ьного) напряжения 2О, если зг1ак сигнала сазюсти отрицателен.. На суммато)ах 2.1 к ..-М сзммируют c.иг. нал (ибки с выходным сигналом генераторов 2О или .1 9 пилообразного напряжения, соответственно. Сигсал с выхода сумматора 21 поступи- ег HS нтор:;й я;;ол, уотройстаа сравнений Oj а с вьгхо.-uJ сумматора 2,2 .- на второй вход .устройства сл.швнения 8. Нуль-орган 12 через последовател.ьно соединенные блок задержки 15 и управляюише входы ключей 17 и ,. 8 ;;aoeMJ;i:eT выход сумматора 22 или 21, на. вход которого посту |ает сиг-нал с генератора, совпа.ца.оиего по знаку с сиг-на.iOM разности, Блок задержки 15 необходик алм гого, чтобгл иредагвратять отрицательное действие корректирующего импульса (перерегулирование) в том случае, когда сигнал с ВЫХО.Ц9 су матора 2.1 или 22 в момент воэникпопек тя сигнала разности ока-. -:: ыоа /-ся бол1ло (по мокулю) ин вир тировавксио ;и.гнала разности, Величину вацер.Х;ьи выбирают тлкой что-ь Hvnjyj /-; равный ей io длителььтюти не проходил на выход системы автоматического управления. В момент, когда сигнал с выхода сумматора 22 или 21 становится равным инвертированному значению сигнала разности, устройство сравнения 8 или 9 отключает корректирующий импульс. Чем больше величина динамической ошибки системы, тем дольше воздействует на систему корректирующий импульс, совпадающий по знаку с сигналом ошибки, и меньше - импульс, не совпадающий по знаку с сигналом ошибки. Крутизна сигналов генераторов пилообра ного напряжения подстраивается такой, чтобы обеспечить минимум величины суммы сглаженных модулей сигнала разности и сигнала ошибки. Для выявления оптимальной крути нь; си нала с выходов генераторов с помощ1.ю блэ ков 10 и 11 определения модуля онрс.цйгяют модули сигнала разности и cиг нaJia оши ки, сглаживают эти модули сглаживающими фильтрами 13 и 14, суммируют сглаженные мо дули сигнала разности и сигнала ошибки и сравнивают каищую последующую сумму с предыдущей; если последующее значение окажется меньше предыдущего, инвертированна инвертором 24 (по величине) сумма сглаженных модулей через ключ 26 управляет генераторами 19 и 20 пилообразных напря ний так, что крутизна их выходных сигнало угленьшается, если же последующая сумма больще предыдущей, сумма сглаженных модулей через ключ 23 увеличивает крутизну генераторов. Предыдущее значение суммы сглаживаюших модулей с последующей сравнивают еле дующим образом: мультивибратор 28 формирует короткий импульс, который своим передним фронтом переписывает предыдущее значение суммы сглаженных модулей с зап минающего элемента 25 в запоминающий элемент 29, а задним записывает текущее значение суммы сглаженных модулей в запоминающий элемент 25 к инвертированное их значение (через инвертор 24) в запоминающий элемент 27. На сумматоре ЗО сравнивается предыдущая сумма с последующей. Если последующая сумма меньше предыдущей, нуль-орган 31 открывает ключ 26, если наоборот, нуль-орган 31 открывает ключ 23 (см. фиг. 2д), Таким образом, предлагаемая система автоматического управления позволяет уме шить динамическую ошибку в 2 - 3 раза. Формула изобретения Система автоматического управления, содержащая последовательно соединенные задающее устройство, чувствительный элемент, сумматор, блок управления, выход которого через объект управления связан со входом чувствительного элемента, фильтр, вход которого соединен с выходам чувствительного элемента, а выход связан через нульорган с блоком задержки, выход которого соединен со входами генераторов пилообразного напряжеН11Я, два ключа, два устройства сравнения, выходы которых через сумматор соединены с блоко -1 управления, о т л и чающаяся тем, что, с повышения точности работы CHvTeMbi автоматического управления, эна содержит два инвертора, два блока опереселения модуля, доп элнительно четыре сумматора, два сглаживающих фильтра, три зanc llнaющиx элемента, мультивибратор и дополнительно два ключа я нуль-орган, выхэа блока задержки соединен с управ- яюшими входами первого и второго ключей, входы первого инвертора и блока О11ределения модуля подключены к выходу фильтра, а выход первого инвертора соединен С первыми входами первого и второго устройства сравнения, выход первого блока определения модуля через первый сглаживаюшлй фильтр подключен к первому входу второго сумматора, я выход чувствительного элемонта через лоследэвательно соединенные вт:эрэй блок определения модуля и второй сглаживающий фильтр подключен к его втэрокчу входу, выход второго сумматора через пэследэБательно соединенные первый и третий запоминающие элементы соединен с первы 4 входом трегьего сумматора, и через последэвательно соединенные второй инвертор и втэрсж запоминающий элементсо вторым входом третьего сумматора, причем выход третьего сумматора через второй нуль-орган подключен к управляющим входам третьего и четвертого ключей, выход второго сумматора также через третий ключ и через последовательно включенные второй инвертор и четвертый ключ подключен к управляющим входам первого и второго генераторов пилообразного напряжения, выходы которых подключены к первым входам четвертого и пятого сумматоровсоот ветственно, вторые входы которых подключены к выходу чувствительного элемента, а выходы четвертогО и пятого сумматоров подключены ко вторым входам первого и второго устройства сравнения соответственно, управляющие входы первого, второго и третьего запоминающих элементов поаклю- -гены к вь1холу мульт:1випрат:;ра.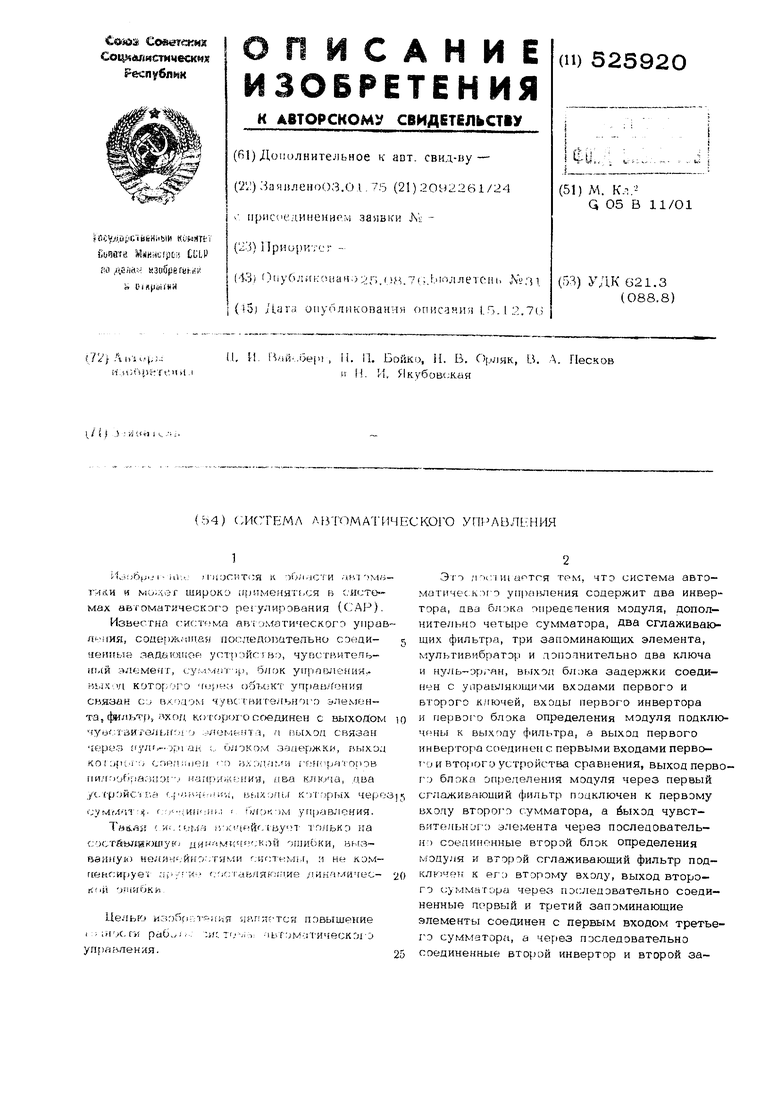
| название | год | авторы | номер документа |
|---|---|---|---|
| Синусный преобразователь | 1979 |
|
SU801001A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| Синтезатор частот | 1985 |
|
SU1358092A1 |
| Обратимый вольтореверсивный стабилизатор постоянного напряжения | 1983 |
|
SU1141389A1 |
| Система автоматического регулирования | 1983 |
|
SU1083158A1 |
| Устройство усреднения | 1986 |
|
SU1348862A2 |
| Устройство для воспроизведения аналогового сигнала | 1988 |
|
SU1524175A1 |
| Устройство слежения за линией стыка | 1988 |
|
SU1507545A1 |
| Дифференцирующе-сглаживающее устройство | 1986 |
|
SU1363263A1 |
| Система автоматического управления | 1972 |
|
SU446031A1 |