,1
Известная шстеМа автоматического управления, содержащая последовательно соеди-неиные задающее устройство, чувствительный элемент, сумматор, схему управлевия и объектуправления, замкнутые обратной связью, не обеспечивает высокой точности.
Предлагаемая система для увеличения точности работы в установившемся режиме содержит последовательно соединенные сглаживающий фильтр и сравнивающее устройство, входы которых соединены с выходом чувств1Ительного элемента, нуль - орган и дифференциатор, входы которых подключены к выходу сравнивающего устройства, пороговое устройство, два ключа, диоды и триггер, выходы которого через соответствующий ключ соединены с сумматором, а управляющие входы ключей и порогового устройства через противоположно включенные диоды соединены с выходом дифференциатора, блок опорного сигнала, связанный со входом порогового устройства, причем первый вход триггера соединен с выходом нуль-органа, а второй - с выходом порогового устройства.
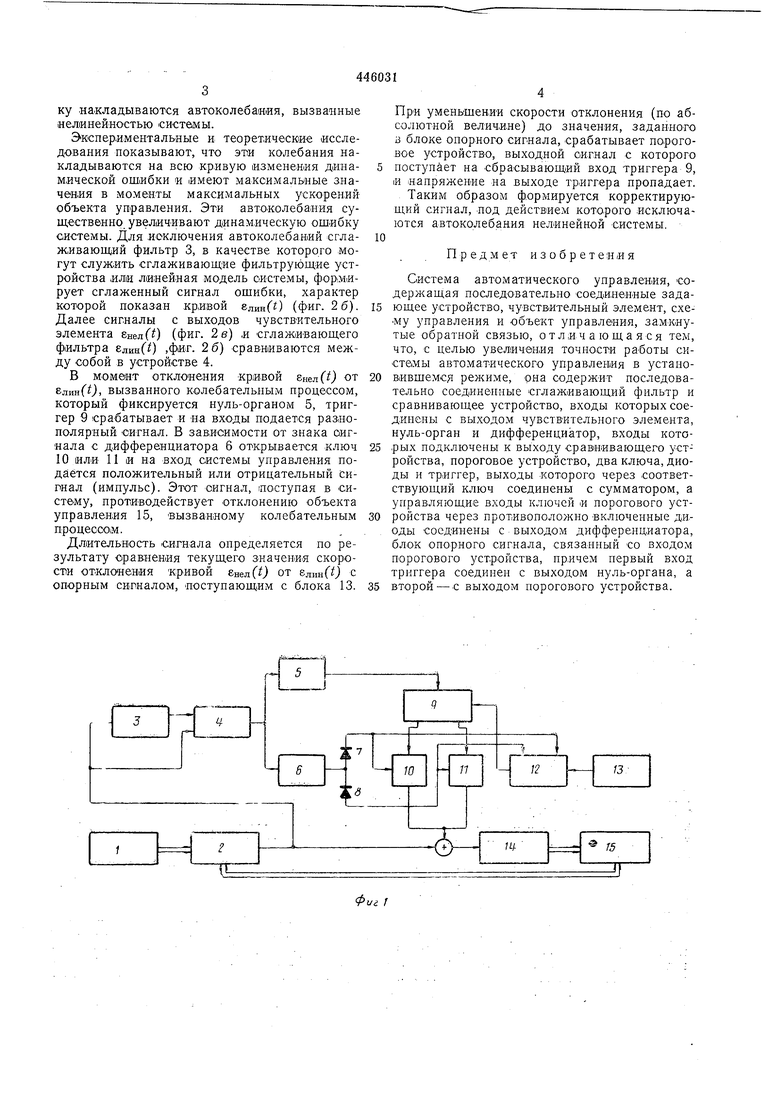
На фиг. 1 изображена функциональная схема предлагаемого устройства. Она содержит задающее устройство 1, чувствительный элемент 2, сглаживающий фильтр 3, сравнивающее устройство 4, нуль-орган 5, дифференциатор 6, диоды 7 и 8, триггер 9, ключи 10 и
И, пороговое устройство 12, блок опорного сигнала 13, систему управления 14 и объект управления 15.
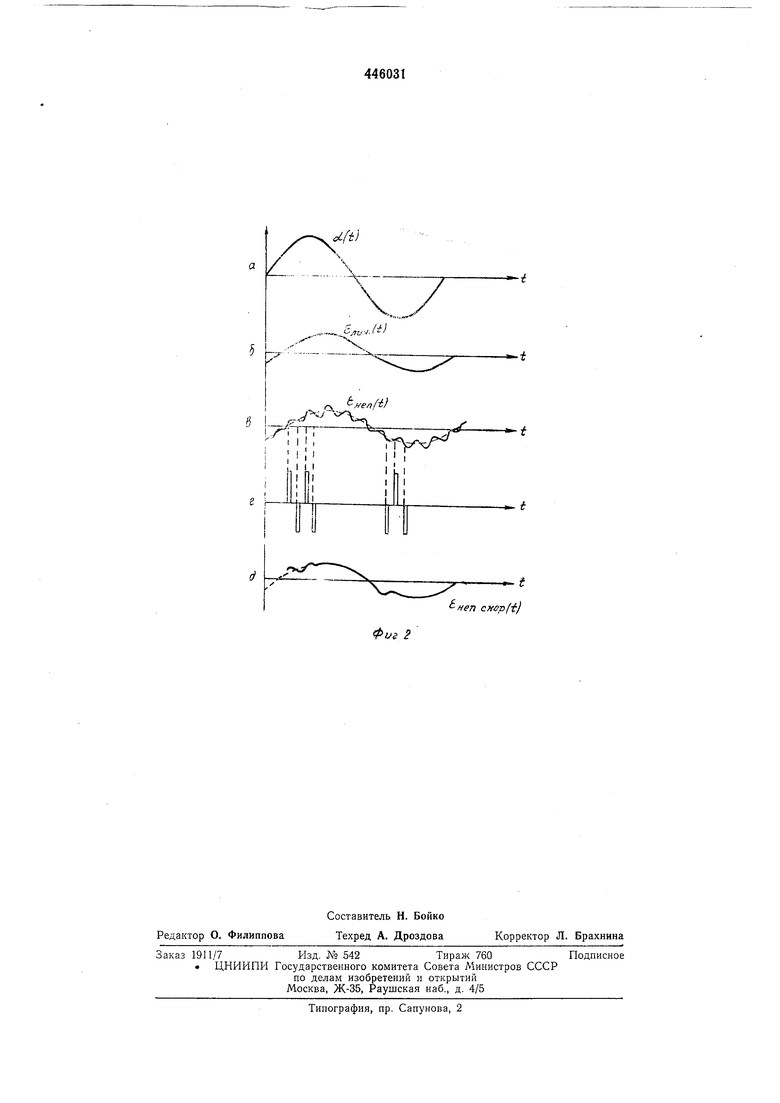
На фиг. 2 изображены временные диаграммы:
а - диаграмма задающего воздействия; б - диаграмма ошибки линейной системы (сглаженная кривая ошибки нелинейной системы);
б - диаграмма ошибки нелинейной системы; г - корректирующие импульсы; д - диаграмма ошибки скорректированной
нелинейной системы.
Система автоматического управления работает следующим образом.
Например, объект управления 15 должен с высокой точностью отслеживать движение задающего устройства 1 по закону а(). Система замкнута по углу и при слежении имеет динамическую ошибку, характер которой показан на кривой бнел. (О (фиг. 2в). Величина и форма динамической ошибки завикзит от вида управляющего воздействия а(0 « параметров системы. ЕСли бы система была линейной, т. е. отсутствовали бы люфт, зона нечувствительности и другие, то динамическая ошибка имела бы гладкий характер при гладком управляющем воздействии. Однако электромеханических линейных систем практически, нет. В нелинейных системах на динамическую ошибку накладываются автоколебания, вызванные нелинейностью системы.
Зкспериментальные и теоретические исследования показывают, что эти колебания накладываются на всю кр.ивую изменения динамической ошибки и имеют максимальные значения в моменты максимальных ускоренийобъекта управления. Эти автоколебания существенно увеличивают динамическую ошибку системы. Для .исключения автоколебаний сглаживающий фильтр 3, в качестве которого могут служить сглаживающие фильтрующие устройства или линейная модель системы, фор|Мирует сглаженный сигнал ошибки, характер которой показан кривой вдинГ) (фиг. 26). Далее сигналы с выходов чувствительного элемента енелСО (фиг. 2 в) и сглаживающего фильтра блинСО фиг. 26) сравниваются между собой в устройстве 4.
В момент отклонения кривой Snen(t) от елин(0 вызванного колебательным процессом, который фиксируется нуль-органом 5, триггер 9 срабатывает и -на входы подается разнополярный сигнал. В зависимости от знака сигнала с дифференциатора 6 открывается ключ 10 или 11 (И на вход системы управления подаётся положительный или отрицательный сигнал (импульс). Этот сигнал, поступая в систему, противодействует отклонению объекта управления 15, вызванному колебательным процессом.
Длительность сигнала определяется но результату сравнения текущего значения скорости отклОнения кривой енелСО от блинСО с опорным сигналом, поступающим с блока 13.
При уменьшении скорости отклонения (по абсолютной величине) до значения, заданного в блоке опорного сигнала, срабатывает пороговое устройство, выходной сигнал с которого поступает на сбрасывающий вход триггера 9, и напряжение на выходе триггера пропадает. Таким образом ф.ормируется корректирующий сигнал, под действием которого исключаются автоколебания нелинейной системы.
Предмет изобретения
Система автоматического управления, содержащая последовательно соединенные задающее устройство, чувствительный элемент, схему управления и объект управления, замкнутые обратной связью, отличающаяся тем, что, с целью увеличения точности работы системы автоматического управления в установившемся режиме, она содержит последовательно соединенные сглаживающий фильтр и сравнивающее устройство, входы которых соединены с выходом чувствительного элемента, нуль-орган и дифференциатор, входы которых подключены к выходу сравнивающего устройства, пороговое устройство, два ключа, диоды и триггер, выходы которого через соответствующий ключ соединены с сумматором, а управляющие входы ключей и порогового устройства через противоположно включенные диоды соединены с выходом дифференциатора, блок опорного сигнала, связанный со входом порогового устройства, причем первый вход триггера соединен с выходом нуль-органа, а
второй--с выходом порогового устройства.
нел cHCplf)
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции нелинейной системы автоматического регулирования | 1972 |
|
SU451047A1 |
| ДАТЧИК НУЛЕВОГО ТОКА | 2009 |
|
RU2390906C1 |
| Устройство для измерения механических величин | 1982 |
|
SU1018003A1 |
| Система автоматического управления | 1975 |
|
SU525920A1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| Устройство для управления тиристорным выпрямителем | 1982 |
|
SU1046896A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Устройство для измерения нелинейности пилообразного напряжения | 1990 |
|
SU1777101A1 |
| Следящая система | 1987 |
|
SU1464138A1 |
| Способ регулирования частоты вращения двигателя внутреннего сгорания и устройство для его осуществления | 1983 |
|
SU1149045A1 |