5, выходы которых подключены к дешифратору 6. Выходы демодуляторов 2-4 соединены также с аналоговыми входами ключей 7. Выход дешифратора 6 подключен к управляюш,им входам преобразователя 8 напряжениекод и ключам 7, выход которых соединен с аналоговым входом преобразователя 8 напряжение- код и дифференциатором И. Выход дифференциатора 11 подключен к блоку 12 выделения модуля, а выход блока 12 выделения модуля через ФНЧ 13 соединен с аналоговым входом второго ПНК 14. Знаковый вход ПНК 14 подсоединяется к знаковому входу реверсивного счетчика 10 и к знаковому выходу вычитающего устройства 9. Цифровой выход ПНК 14 соединен с сумматором 15. Второй выход вычитаюш,его устройства 9 соединен с реверсивным счетчиком 10. Цифровые выходы реверсивного счетчика 10 подсоединены к сумматору 15. Выход цифрового эквивалента угла поворота вала осуществляется с выхода сумматора 15. Выход ПНК 8 соединен с входом вычитающего устройства 9.
Сельсин-датчик 1 преобразует механический угол поворота вала в электрический эквивалент, которым является трехфазное напряжение сельсина А, В и С, модулированное по амплитуде по закону синуса угла поворота.
Демодуляторы 2, 3 н 4 выделяют из поступающих напряжений фаз сельсина А, В и С огибающие, свободные от пульсаций опорного напряжения и пропорциональные синусу угла поворота вала.
Компараторы 5 сравнивают поступающие напряжения с нулевым потенциалом и между собой.
Дешифратор 6 управляет ключами 7 и ПНК 8. Первый преобразователь напряжение-код 8 преобразует напряжение, поступающее на его вход, в цифровую форму.
Вычитающее устройство 9 осуществляет вычитание двух последовательных во времени кодов ПНК 8, обеспечивает единичные приращения на его выходе и определяет направление вращения.
Реверсивный счетчик 10 обеспечивает запоминание последовательных единичных приращений.
Дифференциатор 11 вырабатывает напряжение, пропорциональное скорости вращения вала, блок 12 выделения модуля и ФНЧ 13 определяют модуль скорости вращения вала. Второй ПНК 14 преобразует постоянное напряжение, пропорциональное модулю скорости, в цифровую форму, а сумматор 15 производит сложение цифрового эквивалента угла поворота вала от реверсивного счетчика 10 с цифровым эквивалентом скорости от ПНК 14.
Работа преобразователя заключается в следующем.
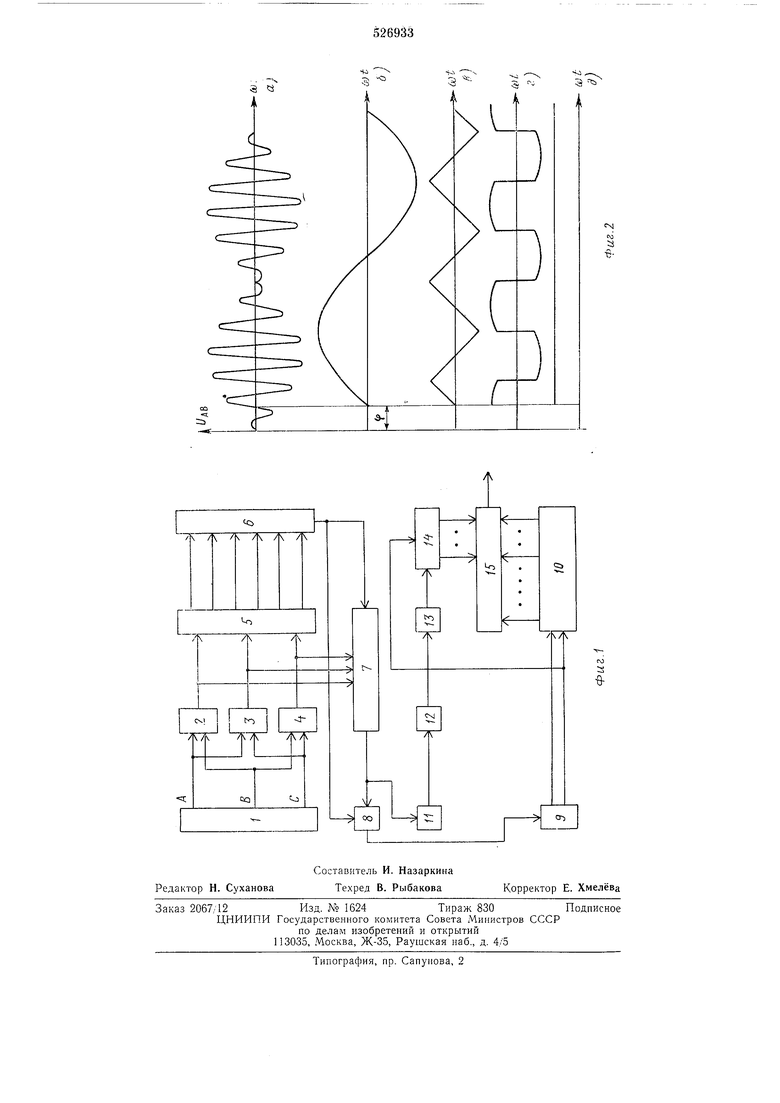
Известно, что при использовании сельсина угол поворота вала определяется тремя переменными напряжениями, сдвинутыми относительно друг друга на 120° и модулированными по амплитуде по закону синуса угла поворота. Эти напряжения преобразуются в напряжения, являющиеся огибающими неременных аналоговых напряжений сельсина. Как видно из фиг. 2 в за один оборот вала из этих огибающих выделяются двенадцать секторов по 30° каждый, причем в каждом из секторов выполняется (с точностью 2%) соотHGIUCHJIC IL/IEEEEC/. (1). ГраНИЦЫ ЭТИХ СеКТОрСЛ
определеные точками пересечения огибаю1цих
между собой и с нулевым уровнем напряжения.
Определение моментов пересечения производится с помощью компараторов, которые через дешифратор управляют ключами н первым
преобразователем напряжение-код. Секторные напряжения затем преобразуются в код. При этом изменение кода угла в реверсивном счетчике производится единичными приращениями, поступающими с вычитающего устройства н имеющими место при из.ме}1еиии кода преобразователя.
При использовании в предлагаемом преобразователе промышленной сети 50 Гц или более низкой частоты в качестве опорной демодуляторы, используемые в преобразователе и обеспечивающие получение огибающих, свободных от пульсации опорного напряжения, можно рассматривать как неминимально-фазовые звенья. Это объясняется тем, что для
рабочего диапазона изменения частоты огнбающей (10-15 Гц), определяемой скоростью поворота вала, фазовая характеристика демодулятора линейно зависит от частоты при постоянной амплитуде на выходе демодулятора.
Коэффициент передачи пеминимально-фазового звена в общем виде равен постоянной величине А, а фазочастотная характеристика определяется выражением ja)l -озт (2), где т - постоянная времени, а со - частота.
Для компенсации фазового сдвига (задержки сигнала огибающей по отношению к неременному аналоговому напряжению на входе демодулятора) используется напряжение корректировки UK, которое определяется производной от огибающей синуса угла поворота вала, т. е.
т, , d sin ш ,.,„ч
(7к д «№ cos ш,(6)
(it
где k - коэффициент пропорциональности.
В предлагаемом устройстве дифференцируются отрезки синусоиды в пределах от О до ±30°, которые при указанных значениях угла определяют изменение косинуса по модулю в пределах от 1 до 0,88.
Таким образом, последнее выражение может быть переписано в виде Ukxka) (4).
Сравнивая формулу (4) с формулой (2), находим, что если , то полученное напряжение корректировки Uk компенсирует фазовый сдвиг демодулятора.
Предлагаемый преобразователь работает следующим образом.
Трехфазное напряжение сельсина А, В и С поступает в соответствующих сочетаниях на
в.ходы демодулятора 2, 3 и 4. На фиг. 2 а показано переменное аналоговое напряжение UAB, поступающее на вход демодулятора 2. На вход демодуляторов 3 и 4 поступают аналогичные напряжения, но сдвинутое относительно t/AB на 120° и 240° соответственно. Выходные напряжения демодуляторов 2, Зи4 - огибающие, сдвинутые от 1осительно входного напряжения па угол в сторону запаздывания.
На фиг. 2 G изображена огибающая демодулятора 2. Аналогично изображаются огибающие демодуляторов 3 и 4.
На фиг. 2 Q изображено линейно-падающее и линейно-нарастающее напряжения на выходе ключей 7. Каждый из двенадцати отрезкоз этого напряжения соответствует изменению угла по 30°. Нилообразное напряжение с выхода ключей 7 поступает на дифференциатор 11, который обеспечивает преобразование линейно-нарастающее или линейнопадающего напряжения в прямоугольное напряжение положительной и отрицательной полярностей (фиг. 2 г), соответствующее наклону пилообразного напряжения, т. е. скорости изменения угла и, такнм образом, осуществляет операцию, соответствующую выражепию (4). Подбором коэффициента передачи дифференциатора обеспечивается равенство 1;. Как видно из фиг. 2 г, выходное прямоугольное нанряжение дифференциатора 11 будет иметь небольщие отклонения от постоянной величины, определяемой скоростью вращения вала, за счет нелинейности функции синуса в дианазоне изменения угла в пределах от О до ±30°. Указанное отклонение комненсируется блоком 12 выделения модуля совместно с ФНЧ 13, на которые поступает прямоугольное напряжение. От ФНЧ 13 на ПНК 14 поступает постоянное напряжение, пропорциоичльное фазовому сдвигу (фиг. 2д).
Носле преобразовання этого нагфяжсния ПНК 14 в цифровую форму код коррекции при прямом направлении вращения вала сумм руется в комбинационном сумматоре 15 с кодом
угла, поступающего с цифрового выхода реверсивного счетчика 10. С вычитающего устройства 9 поступает знак на реверсивный счетчик 10 н на ПНК 14. При обратном направлении врапения вала комбинационный сумматор
15 производит суммирование кода угла реверсивного счетчика 10 с дополнительным кодом коррекции ПНК 14. Знак направления вращения определяется вычитанием двух младщих разрядов последующего и предыдущего
кодов, полученных в первом ПНК 8. На выходе комбинационного сумматора получается полностью скорректированный код угла поворота вала. Таким образом, предлагаемый преобразователь позволяет повысить точность цифрового преобразователя при достаточно простом техническом рещении в сельсинной передаче угла поворота вала.
Формула изобретения
Преобразователь угла поворота вала в код по авт. св. 470841, отличающийся тем,
что, с целью повыщення точности работы преобразователя, в него введены дифференциатор, фильтр нижних частот, блок выделения модуля, сумматор н дополнительный преобразователь напряжение - код, выходы которого
подключены к одним из входов сумматора, первый вход соединен с вы.ходом вычитающего устройства, а второй вход дополнительного преобразователя напряжение - код соединен с выходом ключей через последовательно соеднненцые днфференцнатор, блок выделения модуля и фильтр нижних частот.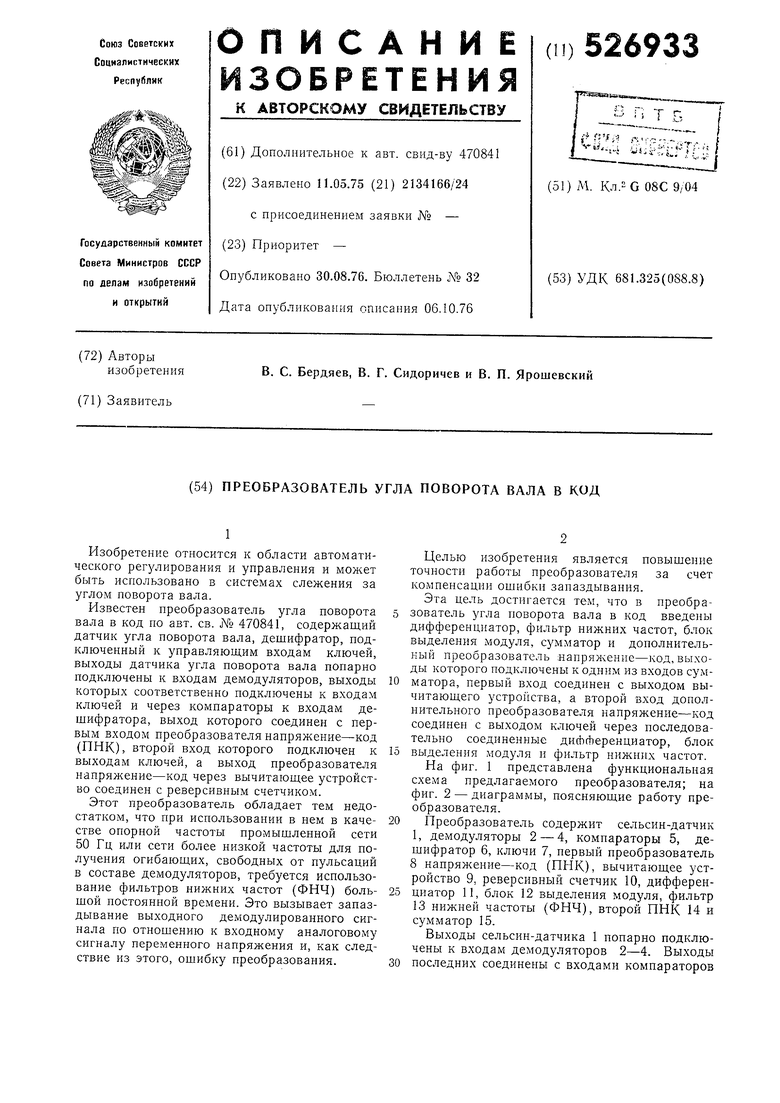
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1976 |
|
SU693414A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1283968A1 |
| Преобразователь угла поворота вала в код | 1973 |
|
SU470841A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU720457A2 |
| Преобразователь угол-код | 1975 |
|
SU520607A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1125643A1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1197080A1 |
| Датчик скорости вращения | 1978 |
|
SU777582A1 |
| Датчик скорости вращения | 1976 |
|
SU600446A2 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1279068A1 |