1
Изобретение относится к транспортному машиностроению и может быть нспольэовано для создания самоходных аппаратов высокой проходимости с автоматическим управлением.
Известно шагающее транспортное средство, содержащее опорный корпус и две бортовые опоры, которые посредством ведущих кривошипов, установленных шарннрно в опорном корпусе, соединены одна с другой и с тяговым приводом вращения.
Существенным недостатком такого шагающего устройства, в котором ведущие кривошипы противоположных бортов жестко связаны между собой, является отсутствие путевой устойчивости из-за невозможности осуществления поворотов.
Цель изобретения - обеспечение возможности поворота шагающего транспортного средства.
Это достигается тем, что между ведущими кривошипами противополо кньш бортов установлен симметричный дифференциал, который снабжен переключателем режима движения и синхронизирующим механизмом
Симметричный дифференциал может содержать водило и солнечные шестерни левого и правого бортов, каждая из которых жестко соединена со своим кривошипом, а переключатель режима движения вьшолнен в виде двухвенцовой муфты, соединяющей попеременно водило с корпусом дифференциала и солнечной шестерней левого борта.
Синхронизирующий механизм может состоять из жестко связанного с солнечной шестерней правого борта основного кулачка, конечного выключателя, установленного в корпусе дифференциала, и дополнительного кулачка, установленного подвижно в радиальном направлении на водиле и оё&спвчк- вающего взаимосвязь конечного выключателя с основным кулачком.
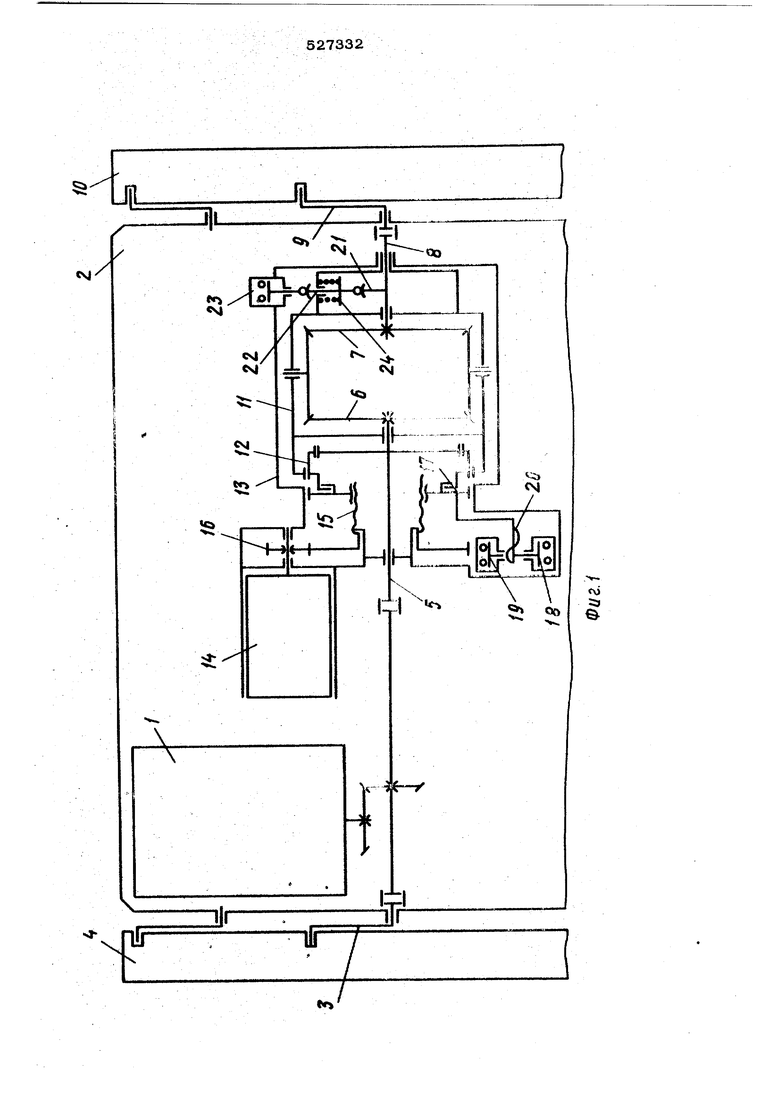
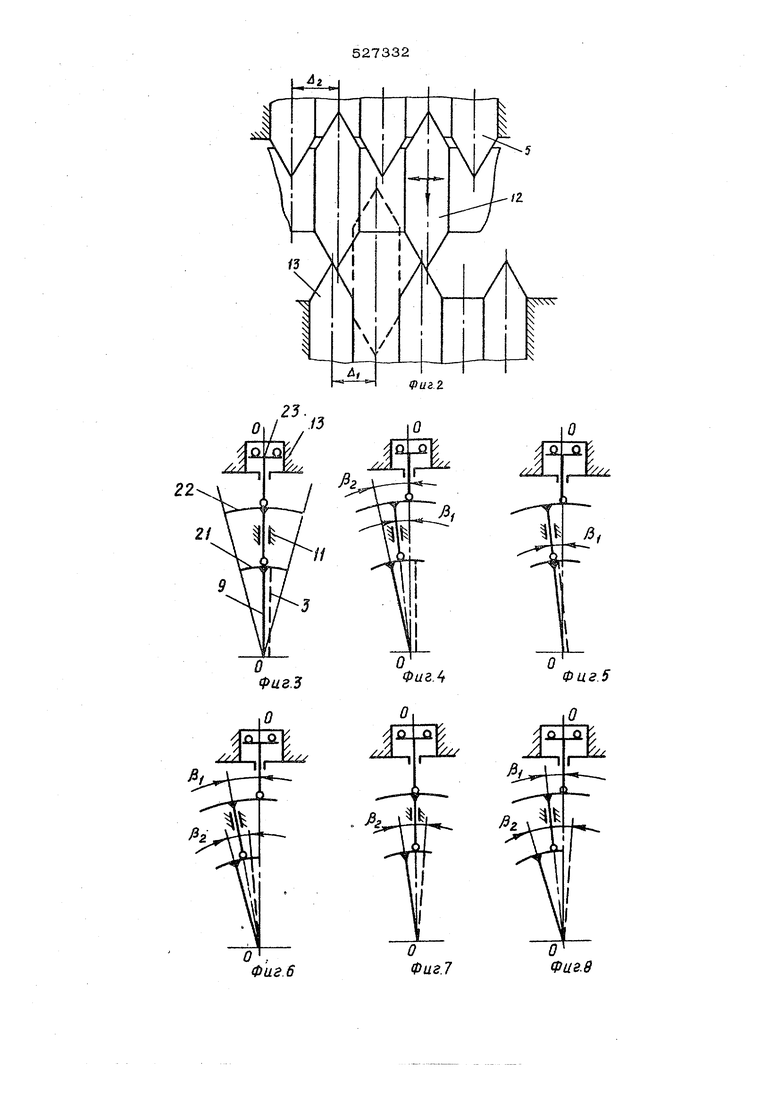
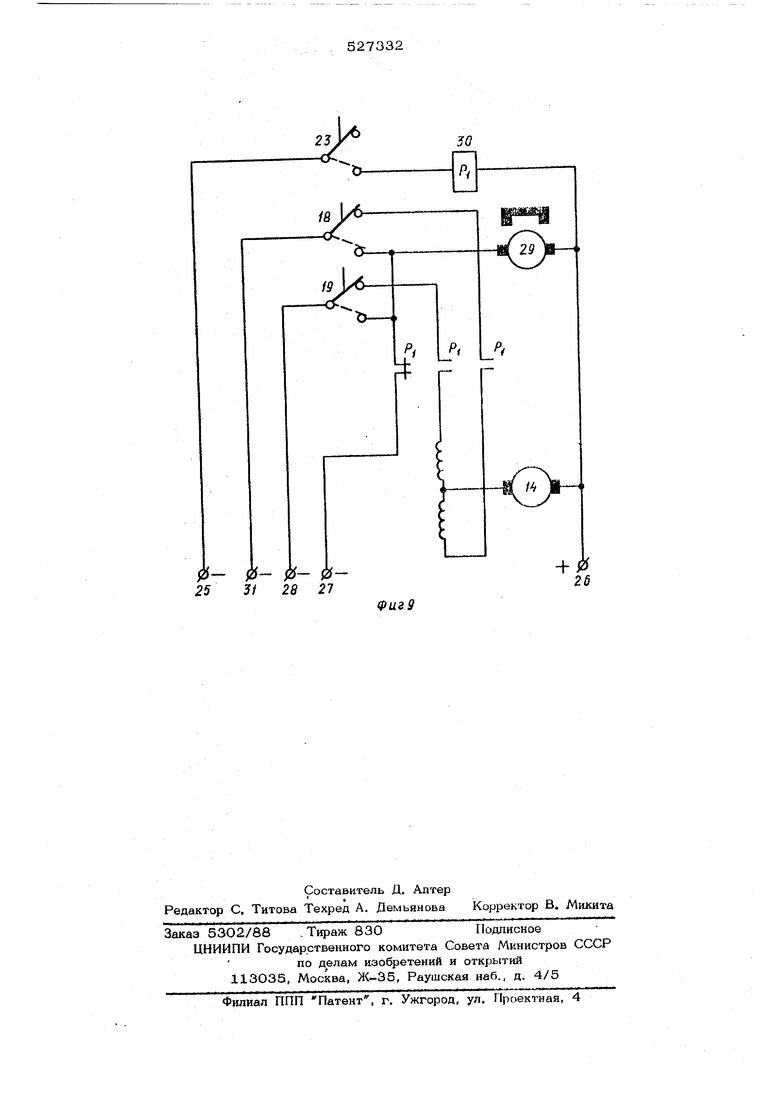
На фиг. 1 изофажена кинематическая схема шагающего транспортного средства; на фиг, 2 - соединение зубчатой муфты с корпусом дифференциала; на фигурах 3-8 - взаимное положение элементов синхронизирующего механизма при выполнении транопортным средством различных маневров; на фиг. 9 - электрическая схема управления транспортным средством. Шагающее транспортное средство состоит из тягового привода 1, например, электромеханического типа, установленного на корпусе 2, соединенного с ведущим криво- Ш1ШОМ 3 левой опоры 4 и с полуосью 5, соединенной с солнечной шестерней 6 ди4 ференциала. Другая солнечная шестерня 7 через полуось 8 соединена с ведущим кривошипом 9 правой опоры 1О. Водило 11 в режиме прямолинейного движения с помощью переключателя режима движения в вид например, зубчатой муфты 12, один конец которой постоянно находится в зацеплении с водилом 11, соединено с зубчатым венцом полуоси 5, а в режиме поворота - кор пусом 13 дифференциала. Для перемещения зубчатой муфты 12 имеется переключающий механизм, состоящий из привода управления 14, например, электромеханического типа, винта 15 соединенного с помощью зубчатого ;Венца с вы ходной шестерней 16 привода управления 1 гайки 17, установленной в зубчатом венце корпуса 13 дифференциала, двух конечных выключателей 18 и 19 и соединенного с гайкой 17 кулачка 20. Зубья венцов муфты 12, полуоси 5 и корпуса 13 дифференциала имеют заходные части, которые вьтолнены в в1аде треуголь ника с острым углом при вершине на глубину по окружности впадин зубчатых венцо На полуоси 8 установлен кулачок 21, в водила 11 подвижно в радиальном направлении - промежуточный кулачок 22, а на корпусе 13 дифференциала помещен конечный выключатель 23, включенный в цеп управления (см, фиг. 9), В данной конструкции кулачок 22 выполнен в виде рычага, установленного на оси, закрепленной в водиле 11. Кулачок 22 поджимается к полуоси 8 пружиной кручения 24. Кулачки 21 и 22, ведущие кривошипы 3 и 9 и конечный выключатель 23 первоначально установлены гак, что их оси сим метрии совмещены (см. фиг. 3) и совпа дают с вертикалью О-О, перпендикулярной опорной поверхности. Шагающее транспортное средство при вьшолнении им различных маневров работа ет следующим образом. В режиме прямолинейного движения зуб чатая муфта 12 соединена с зубчатым вен цом полуоси 5, поэтому ведущие кривошип 3 и 9 жестко связаны межх;у собой, а в режиме поворота зубчатая муфта 12 соединена с корпусом 13 дифференциала, и ве дущие кривошипы 3 и 9 в этом случае вр щаются с равными, но противоположно направленными угловыми скоростями. 2 Гфи движении транспортного средства в режиме прямолинейного движения на клеммы 25 и 26 (см. фиг. 9) подано напряжение, а на клеммы 27 и 28 - соответственно сигналы Стоп и Прямолинейное движение в виде отрицательного напряжения. При этом конечный выключатель 19 в результате взаимодействия кулачка 2О с последним занимает положение, изображенное на фиг. 9 пунктирной линией, и через него подается напряжение на тяговый электродвигатель 29. Перед переходом транспортного средства с прямолинейного движения на поворот сигнал Гфямолинейное движение отключается, и при срабатывании конечного выключателя 23 (на фиг. 9) положение его показано пунктирной линией), в результате взаимодействия кулачка 22 (см. фиг. 1 и фиг.З) с последним, срабатывает реле ЗО, которое через нормально замкнутый контакт выключает тяговый электродвигатель 29, а через нормально разомкнутые контакты подготавливает электродвигатель привода управления 14 к работе. При выборе угла рабочей зоны кулачков 21 и 22 равного двойному углу выбега тягового привода 1, приведенному к оси солнечной шестерни дифференциала, положение ведущих кривошипов 3 и 9, конечного выключателя 23 и кулачков 21 и 22 после остановки транспортного средства соответствует изображенному на фиг. 3. Затем на клемму 31 (см. фиг. 9) подается сигнал Поворот в виде отрицательного напряжения, которое через конечный выключатель 19 (на фиг. 9 положение его показано сплошной линией) подается на обмотки возбуждения электродвигателя привода управления 14, который включается и через выходную шестерню 16 (см. фиг. 1) вращает винт 15, а гайка 17, перемещаясь по шлицам корпуса 13 дифференциала, перемещает зубчатую муфту 12 таким образом, что ее наружный венец входит в зацепление с зубчатым венцом корпуса 13. В момент окончания переключения, в результате взаимодействия кулачка 20 с конечным вьшлючателем 19, последний срабатывает и занимает положение, показанное на фиг. 9 пунктирной линией, при этом конечный выключатель 19 занимает противопо-г ложное положение. Транспортное средство поворачивается. При соединении зубчатой муфты 12 с зубчатым венцом корпуса 13 дифференциала (соединение схематично показано на фиг. 2) ведущий кривошип 3 (см. фиг. 3) сохраняет свое положение, поскольку он жестко связан с тяговым приводом 1, а ведущий кривошил 9 может повернуться от вертикали 0-0 на угол 2. (см. фиг, 4), водило 11 - на угол , вдвое меньший угла Р 2. причем значение угла fi может изменяться от ноля до максимального значения uk (см, фиг. 2), так как возмож но несовпадение зубьев муфты 12 и впадин зубчатого венца корпуса 13 дифференциала. Перед переходом транспортного средства с режима поворота на прямолинейное движе ние сигнал Поворот (см. фиг. 9) отключается, и при срабатывании конечного выключателя 23., в результате взаимодействия кулачка 21 (см. фиг. 1 и фиг. 3) с послед ним через другой кулачок 22, срабатывает реле ЗО, которое через нормально замкнутый контакт вьпслючает тяговый электродви гатель 29. Положение ведущих кривошипов 3 и 9 конечного выключателя 23 и кулачков 21 и 22 после остановки транспортного средства соответствует положению, изо- браженному на фиг, 7. Затем на клемму 28 (см. фиг. 9) подается сигнал Прямолинейное движение, и напряжение через конечный выключатель 19 (положение его на фиг. 9 показано сплошной линией) поступает на обмотки возбуждения электродвигателя привода управления 14, который включается, и происходит соединение зубчатой муфты 12 с зубчатым венцом полуоси 5. В момент окончания переключения, в результате взаимодействия кулачка 2О с конечным выключателем 19, последний срабатывает и занимает положение, показанное на фиг. 9 пунктирной линией, при этом конечный выключатель 18 занимает противоположное положение. Осуществляется прямолинейное движение. При соединении зубчатой муфты 12 с зубчатым венцом полуоси 5 водило 11 мо- жет развернуться от своего первоначальног положения на максимально возможный угол А, (см. фиг. 2) ввиду несовпадения зубь ев муфты 12 и впадин зубчатого венца полуоси 5. Поаожение перед началом прямолинейного движения ведущих кривошипов 3 и 9, конечного вьпслючателя 23 и кулачков 21 и 22 показано на фиг. 6, на фиГо7 положение этих элементов после окончания прямолинейного движения, а на фиг. 8 перед началом движения транспортного сред ства в режиме поворота, т.е. после соединений зубчатой муфты 12 с корпусом 13 дифференциала. Скончанию поворота будет соответствовать положение ведущих кривошипов 3 и 9 конечного выключателя 23 и кулачков 21 и 22, изображенное на фиг. 5. Затем цикл повторяется. Таким образом, синхронизирующее устройство позволяет устранить накопление угла рассогласования между ведущими кривошипами 3 и 9 при вьшолнении транспортным средством различных. маневров, а при увеличении числа зубьев переключающей муфты 12 значения углов Д и Д (см. фиг. 2) можно свести к минимуму (ориентировочно 1-2О), соответственно уменьшить максимально возможный угол разворота |5 водила 11 (соответственно кулачка 22), а также угол 8, между ведущими кривошипами 3 и 9 (см. фиг, 4-8), что позволит обеспечить большую точность синхронизации опор при движении транспортного средства. Применение данного изобретения позволяет с высокой надежностью и эффективностью осуществлять поворот шагающих транспортных средств, имеющих среднюю и две боковые опоры. Формула изобретения 1.Шагающее транспортное средство, содержащее опорный корпус и две бортовые опоры, которые посредством ведущих кривошипов, установленных шарнирно в опорном корпусе, соединены одна с другой и с тяговым приводом вращения, отличающееся тем, что, с целью обеспечения возможности его поворота, между ведущими кривошипами противоположных бортов установлен симметричный дифференциал, который снабжен переключателем режима движения и синхронизирующим механизмом. 2.Транспортное средство, по п. 1, отличающееся тем, что симметричный дифференциал содержит водило и солнечные шестерни левого и правого бортов, каждая из которых жестко соединена со своим кривошипом, а переключатель режима движения вьшолнен в виде двухвенцовой муфты, соединяющей попеременно водило с корпусом дифференциала и солнечной шестерней левого борта. 3.Транспортное средство по пп. 1 и 2, отличающееся тем, что синхронизирующий механизм состоит из жестко связанного с солнечной шестерней правого борта основного кулачка, конечного выключателя, установленного в корпусе дифференциала, и дополнительного кулачка, установленного подвижно в радиальном направлении на водила и обеспечивающего взаимосвязь конечного выключателя с основным кулачком.
/3
чХЛЧХ
Л
л л 
| название | год | авторы | номер документа |
|---|---|---|---|
| МОТОРНО-ТРАНСМИССИОННЫЙ МОДУЛЬ | 2011 |
|
RU2478045C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2763002C1 |
| ШАГАЮЩАЯ ОПОРА | 1992 |
|
RU2067941C1 |
| ДИФФЕРЕНЦИАЛ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2029898C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
| Механизм привода ведущих колес транспортного средства | 1984 |
|
SU1168440A1 |
| Дифференциал транспортного средства | 1991 |
|
SU1772009A1 |
| Механизм распределения мощности в трансмиссии транспортного средства | 2022 |
|
RU2789152C1 |
| Ведущий мост транспортного средства | 1975 |
|
SU814794A1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
о
л
Л.Л
0- 0- 0 0 25 31 28 27
