(54) УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ДВУХ ВРАЩАТЕЛЬНЫХ ДВИЖЕНИЙ
ЗАХВАТА МАНИПУЛЯТОРА
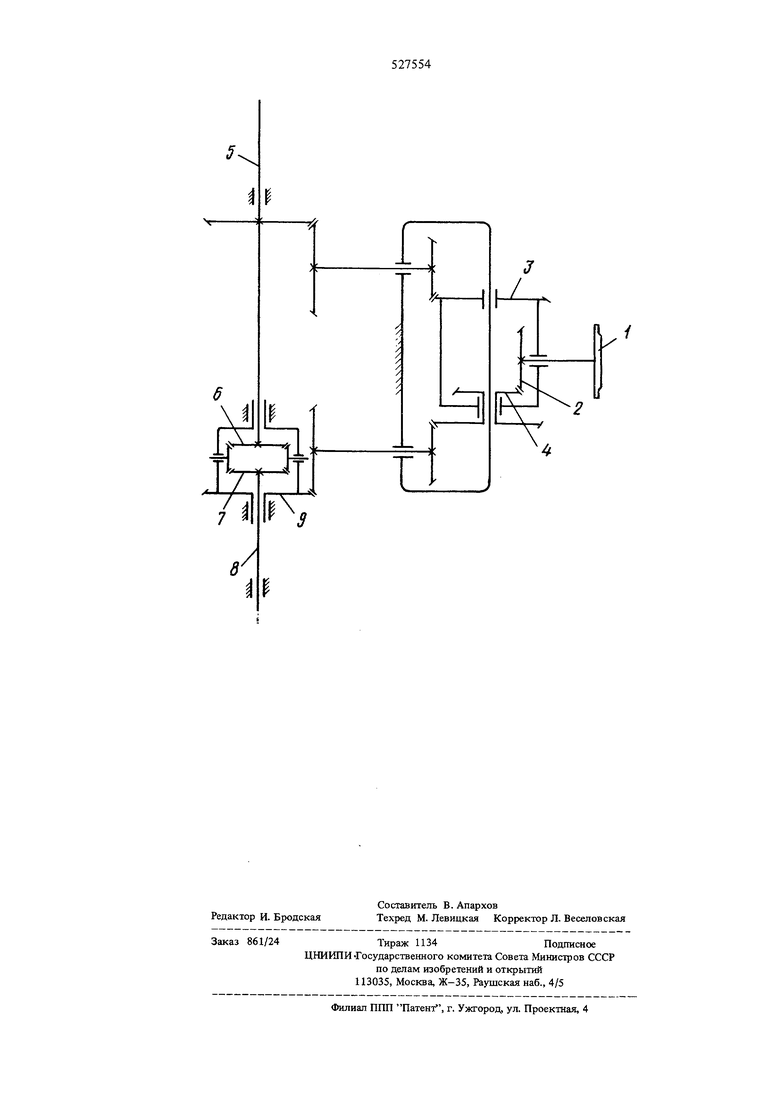
дифференциального механизма, включающего в себя также водило 3 и центральную шестерню 4, общая ось которых перпендикулярна оси сателлита.
Водило 3 кинематически связано с входным валом 5, на которьш жестко посажена центральная шестерня 6 дополнительного конического дифференциала. Центральная шестерня 7 этого дифференциала жестко посажена на входной вал 8. Водило 9 дополнительного дифференциала кинематически связано с центральной шестерней 4 конического дифференциального механизма.
Устройство работает следующим образом.
При врашении захвата манипулятора вокруг своей оси вал 5 с шестерней 6 заторможены. Передача от вала 8 к захвату 1 осуществляется по кинематической цепи: вал 8 - шестерня 7 - водило дополнительного дифференциала 9 - центральная шестерня 4 - сателлит 2,
При этом водило 3 неподвижно, так как оно тормозится валом 5.
При повороте захвата манипулятора относительно оси водила 3 вал 8 с шестерней 7 заторможены, передача от вала 5 к захвату 1 осуществляется по двум кинематическим цепям.
Кинематическая цепь собственного поворота захвата манипулятора: вал 5 - водило 3, захват поворачивается вместе с водилом 3. Кинематическая цепь синхронного поворота центральной шестерни 4, устраняющая обкатьшание сателлита 2 по центральной шестерне 4: вал 5 - шестерня 6 - водило дополнительного дифференциала 9 - центральная шестерня 4. Механизм допускает одновременность вращения захвата манипулятора вокруг своей оси с его поворотом относительно оси водила 3, при этом дополнительный дифференциал обеспечивает суммирование и передачу на центральную шестерню 4 вращений валов-5 и 8.
Применение данного устройства существенно расширяет кинематические возможности прототипа.
Формула изобретения
10
Устройство для осуществления вращательных движений захвата манипулятора, содержащее
конический дифференциальный механизм, сателлит которого жестко связан с захватом, два входных вала, первый из которых кинематически связан с водилом диффере1шлального механизма, а второй - с его центральной шестерней, отличаюш е е с я тем, что, с целью получения независимых вращений захвата манипулятора в двух взаимно перпендикулярных плоскостях, оно снабжено дополнительным коническим дифференциалом, центральные шестерни которого жестко связаны соответственно с первым и вторым входными валами, а водило кинематически связано с центральной шестерней конического дифференциального механизма. Источники информации, принятые во вш1мание при экспертизе:
1- Авторское свидетельство № 303463, кл. F 16
Н 1/28, 13.10.69.
2. Machine Design, 1964, 19.Х1, 36, p. 150-156.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ЗАХВАТНОГО УСТРОЙСТВА | 1996 |
|
RU2110721C1 |
| Манипулятор | 1970 |
|
SU334777A1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Устройство для оринтации захвата манипулятора | 1977 |
|
SU707793A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403143C2 |
| Замкнуто-дифференциальная регулируемая передача | 1975 |
|
SU911070A2 |
| Механизм поворота гусеничной машины | 1975 |
|
SU592653A1 |
| ЗАМКНУТЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ | 1996 |
|
RU2123143C1 |
| ШИРОКОДИАПАЗОННАЯ РЕВЕРСИВНАЯ ТРАНСМИССИЯ | 2020 |
|
RU2729847C1 |