1
Изобретение относится к радиотехнике, в частности к устройствам, предназначенным для имитации сигналов радиолокационных станций (РЛС), может быть использовано при настройке устройств для обработки сигналов и ин,цикащ1и РЛС, а также в радиолокационных тренажерах.
Известен имитатор сигналов РЛС, содержащий устройство для регулирования задержки сигнала, состоящее из ждущего мультивибратора и регулятора задержки, генератор огибающей сигналов, устройства для суммирования и вычитания импульсов, усилитель суммарного сигнала, фильтры, модуляторы, усилитель разностного сигнала, разделительные конденсаторы и генератор колебаний промежуточной частоты. Генератор огибающей сигналов состоит из усилителя импульсов, дифференцирующих цепей, мультивибратора-формирователя сигнала нижнего лепестка диаграммы направленности (ДН), мультивибратора задержки верхнего лепестка ДН, эмиттерных повторителей и мультивибратора-формирователя сигнала верхнего лепестка ДН fIj.
Известный имитатор радиолокашюнны.х сигналов вырабатывает последовательности (пачки) импульсов, заполненные колебам я1 щ промежуточной частоты, следующие с частотой, равной частоте обзора РЛС, а
огибающая каж,дого импульса отражает моноимпульсный характер пеленгации, т.е. по форме воспроизводит пеленгационную характеристику моноимпуольсного радиолокатора.
Однако известный имитатор формирует
ра.аиолокационные сигналы с детерминированной огибающей, несоответствующие по своим свойствам реальным ра.дг1олокацион- ным сигналам, отраженным от флюктуирующих протяж:е;иных по дальности и азимуту объектов, в том чис;1е от земной поверхности со случайным рельефом (при С1%;апировании ДН по азимуту). Корреляционная функция огибающей ка эдого импульса пачки не
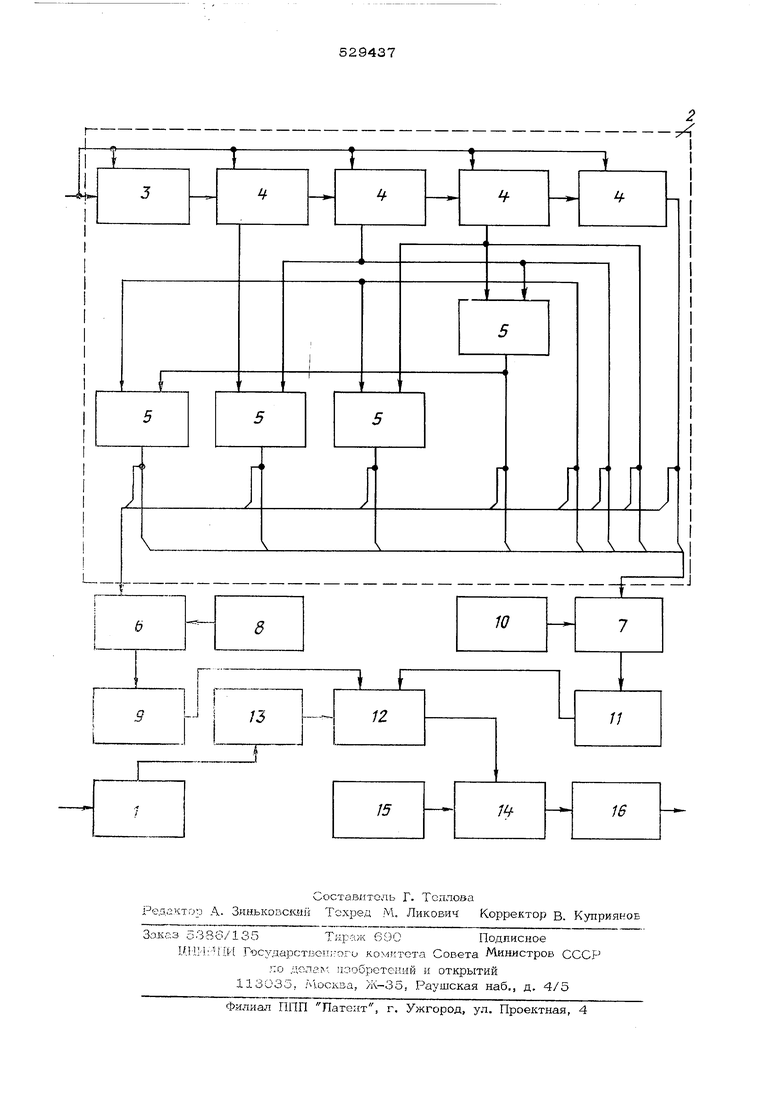
соответствует корреляционной функции реального протяженного по дальности объекта на фиксированном азимуте, а корреляционная функция огибающей пачки импульсов не соответствует корреляционной функции реального протяженного по азимуту объекта. иелью Гзооретения является повышение точности кмргтации за счет приближения дву1 ;ерной корреляционной функции огибаюijiefi сигналоа к заданной пространственно 3pe:s{eHiioi; функции реального сигнала. Для этого имитатор сигналог;, радиолокационной CTai-щии, содержащий устройство для регулирования вре ленной задержки сигналов, генератор огибающей сигналов, ге нератор колебаний промежуточной частоты, модуляторы и фильтр, введены блоки весовых коэффициентов, датчики статистических napaivieTpoB сигнала по дальности и по азимуту, сумматоры функций дальности и азимута и генератор двуг1олярного пилообразного напряжения, прп этом выходы генератора огибаюжей сигнала соединены с соответствуЮлШГми входами блоков весовых коэф фициентов, один из которых подключен к .датчику статистических пара:/;етров сигнала но дальностИ и сул:матору функций дальности, а второй - к датчику статистических параметров сигнала но азимуту и сумматору (Ьункций азнмута а выходы сумматоров функций дальноста и азимута, подключены А перво;..гу и второ.лу входа л первого модулятора, третий вход которого соединен с ге--1ератором двуполярного пилообразного напряжения, связанны-л с устройством для рс1-уа;:ровки лрО1.ле;1Ной задер кки сигналов, а выхо.:; - с одним из входов второго модулятора, второй вход которого соединен с генератором Koneoa;i;iii промежуточной част ты, а выход - с фa:I,. Такой и.ытатор обеспечивает формирование последоБател1 юстей рад поил: пульсов, повторяющихся с частотой, равной частоте скатп-фо- вання ДН антенны, дрзумерпая корреляционная функция огибающей которых соответствует заданной г.ространстсенно-временной кор реляционной функции реального сигнала, отглаженного от протяженной по дальности и азимуту TiOBepxHocTH в секторе обзора, На черетеже приведена структурная элек трическая схема имитатора. И: н-1татор сигналов РЛС содержит устро ство 1, нредназначенное для регулировки временной задержки сигналов, генератор огибающей сигналов (ГОС) 2, выполненный в виде генератора функций Ра,дамахера Уол и состоящий из автоколебательного мультивибратора 3, триггеров 4 и ячеек 5 операции неоднозначности, при выходы ГОС 2 соединены с соответствующими входами блоков 6 и 7 весовых коэффишюнтов. Блок 6 вторыл входом подключен к датчи ку 8 статистических пара;-.1етров сигнала но дальности, а выходом - к входу сумматора 9 функций дальности, блок 7 аналогич но подключен к датчику 10 статистических параметров сигнала по азимуту и сумматору 11 функций азимута. Выходы сумматоров 9 и 11 подключены к входам первого модулято1за 12, тготий вход которого соединен с генератором 13 двунолярного пилообразного напряжения, связанньн 1 с устройством 1, а выход - с одним из входов второго модулятора 14, втором вход которого соединен с генератором 15 колебаний промежуточной частоты (ПЧ), а выход - с фильтром 16. Имитатор сигналов работает следуюши:/ образом. Импульсы синхронизации, соответствующие началу цикла сканирования ДН антенны РЛС по азимуту, подаются на автоколебательный мультивибратор 3 ГОС 2, осуществляя его жесткую синхронизацию, и на триггеры 4, устанавливая их в ну.певое положение. Частота генерируемых мультивибраторов 3 колебаний определяет период повторения совокупности взаимоортогональных функций Ра.цамахера-Уолша (меандров), генерируемых триггерами 4, на выходах которых действует совокупность из четырех функций Радамахера-Уолща. Еще четыре последовательности функций образуются из первых четырех путем логической операции неравнозначности при помохци ячеек 5, Полученные восемь имоортогональных сигналов с выхода ГОС 2 поступают на блоки 6 и 7 весовых коэффициентов, один из которых унравляется датчиком 8, другой - датчиком 10. В блоках 6 и 7 каж.дой из восьми поступающих на их входы функций придается определенный вес (усиление или ослабление) в зависимости от управляющего воздействия, поступающего с датчиков 8 и 1О. С ВЬКОДОЕ блоков 6 и 7 взаимоортогональные сигналы с приобретенным весом подаются на входы су:лматоров 9 и 11 функций дальности и азимута соответственно, служащих (вместе с блоками 6 и 7 и датчиками 8 и 10) для получения двулгерного случайного процесса с зараннее известными корреляционньп-ш функциями по дальности и азимуту. С выходов сумматоров 9 и 11 сложные сигналы, статистические характеристики которых (корреляционные функции) соответствуют статистическим характерис1икам реальных сигналов, отраженных от протя женных по дальности и азимуту объектов, повторяющиеся с частотой, равной частоте сканирования ДН антенны по азиглут , подаются на первый модулятор 12 в качестве модулирующих напряжений, на который подаются также двуполярные пилообразные импульсы с генератора 13, следующие с частотой, равной частоте повторения зондирующих импульсов РЛС.
При этом генератор 13 запускается выходными сигналами устройства 1, имити- руюшего задержку отраженных сигналов по дальности, на вход которого для его запуска поступают синхронизирующие импульсы, следующие с частотой, равной частоте зондирующих импульсов.
Длительность импульсов на выходе генератора 13 соответствует максимальной протяженности имитируемых сигналов по дальности, а форма - повторяет форму пе- аенгационной характеристики моноимпульсной РЛС.
С выхода модулят-ора 12 двуполярные пилообразные импульсы, промодулированные по амплитуде сложным сигналом с заданными статистическими характеристиками, подаются на второй модулятор 14, на второй вход которого поступают непрерывные колебания ПЧ с генератора 15. Промодулированные по амплитуде сложным процессом колебания ПЧ с выхода модулятора 14 через фильтр 16 подаются на выход имитатора.
Имитатор сигналов РЛС применяется для настройки устройств, предназначенных для обработки информации и индикации сложных систем, а также для имитации сложной радиолокационной обстановки при помощи авиационных тренажеров.
Формула изобретения
Имитатор сигналов радиолокационной станции, содержащий устройство для регулировки временной задержки сигналов, онератор огибающей сигналов, генерато колебаний промежуточной частоты, модуляторы и фильтр, о т л и ч а ю щ и и с я тем, что, с целью повышения точности ;;.тации за счет приближения двуморноГ морреляционной функции огибающей сигналог к заданной пространствен;1О време}Гиой к- рреляционной функции реального cnriiana, ;: него введены блоки весовых коыфф;: , гм,-:хз, датчики статистических пара:летро) с;и; л ла по дальтюстл .;0 ази.1уту, функций дaльнocтIi и азп -.-та и генеуЯО}двуполярного пилообразного .;.e:i 1л при этом выходы генератора огибаь- f :;;нала соединены с соответствуют; -; ; .x:;:i,a Ми блоков весовых коэффициенте, о л:; ..; которььх подключен к датчику стат.гс,. оких параметров сигнала по дальност;; i; к сумматору фун1щий дальности, а второй к датчику статистических параметров смгт1епа по азимуту и су1 ;матору функций аз1Г.., а выходы сумматоров функций .ЦГ:Л)-1:)Сти и азимута подклк чаны к перво-.iv п м рому входам первого модулятора, Tpj-. г 1 вход которого соединс с геиорато; U полярного пилообразного напряххен:.; L , ;, занным с устройством для регуллго:- г/Зменцой задержки сигналов, о r-i-xci,; - с одни;,: из входов второго .:одулягога. ;згорой вход которого соединен с )aтopo л KoneoR; -fft п.ол«жуточлой частоты, а выход с фильтр о;..
Источники нНфор/.ааЦЛИ, принятые DO i-.UITмание прн экспертизе:
1. Патент США № 3113312, HKi; 3 .Я 17.7, опубл. 1963.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841104A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841105A1 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841103A1 |
| УПРАВЛЯЮЩИЙ АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2001 |
|
RU2222028C2 |
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЦЕЛЕЙ НА ЭКРАНЕ ИНДИКАТОРА | 1988 |
|
SU1841101A1 |
| АКУСТООПТИЧЕСКОЕ УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 1991 |
|
RU2091810C1 |
| ИМИТАТОР ПАССИВНОГО РАДИОЛОКАТОРА | 1987 |
|
SU1841002A1 |
| ИМИТАТОР ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2010 |
|
RU2449308C1 |