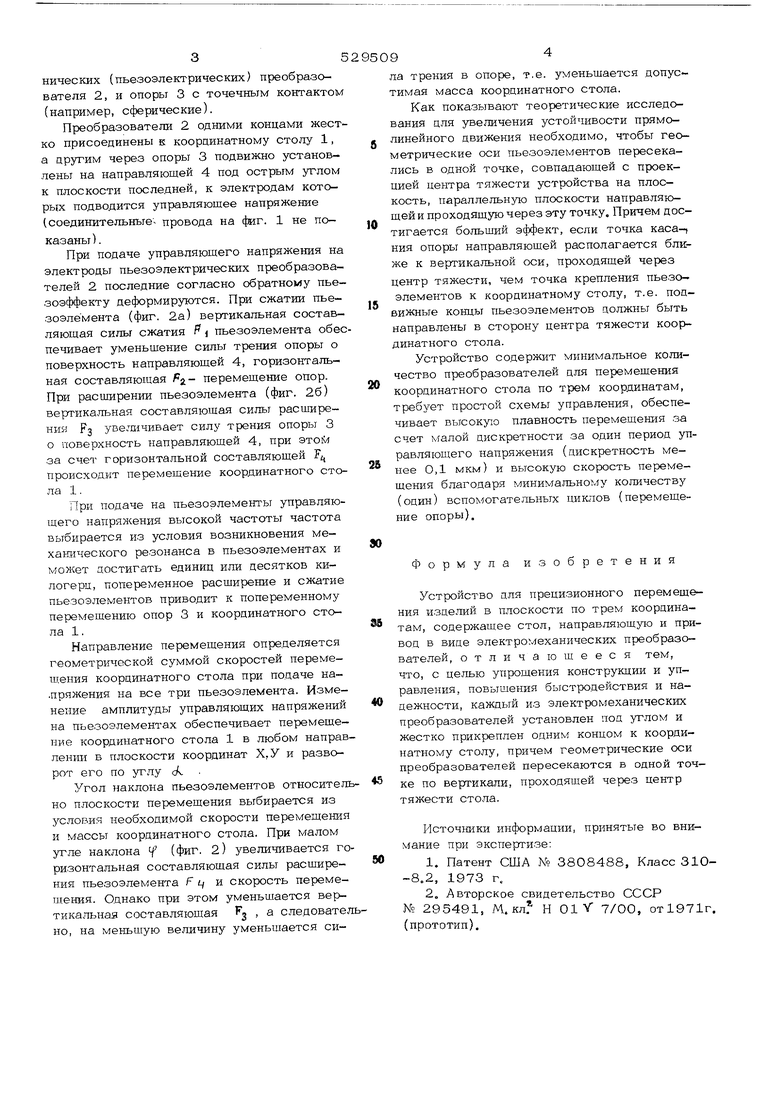
3 нических (пьезоэлектрических) преобразователя 2, и опоры 3 с точечным контактом (например, сферические). Преобразователи 2 одними концами жест ко присоединены s координатному столу 1, а другим через опоры 3 подвижно установлены на направляющей 4 под острым углом к плоскости последней, к электродам которых подводится управляющее напряжение (соединительные- провода на фиг. 1 не показаны). При подаче управляющего напряжения на электроды пьезоэлектрических преобразователей 2 последние согласно обратному пье зоэффекту деформируются. При сжатии пьезоэлемента (фиг. 2а) вертикальная составляющая силы сжатия Р j пьезоэлемента обе печивает уменьшение силы трения опоры о поверхность направляющей 4, горизонтальная составляющая перемещение опор. При расширении пьезоэлемента (фиг. 26) вертикальная составляющая силы расщирения РЗ уве шчивает силу трения опоры 3 о поверхность направляющей 4, при STOivf за счет горизонтальной составляющей F, происходит перемещение координатного сто ла 1. При подаче на пьезоэлементы управляющего напряжения высокой частоты частота выбирается из условия возникновения механического резонанса в пьезоэлементах и может достигать единиц или десятков килогерц, попеременное расщире ше и сжатие пьезоэлементов приводит к попеременному перемещению опор 3 и координатного стола 1. Направление перемещения определяется геометрической суммой скоростей перемещ.ения координатного стола при подаче на.пряжения на все три пьезоэлемента. Изменение амплитуды управляющих напряжений на пьезоэлементах обеспечивает перемещение координатного стола 1 в любом направ лении в плоскости координат Х.У и разворот его по углу с . Угол наклона пьезоэлементов относител но плоскости перемещения выбирается из условия необходимой скорости перемещения и массы координатного стола. При малом угле наклона f (фиг. 2) увеличивается го ризонтальная составляющая силы расщирения пьезоэлемента F LI и скорость перемепюния. Однако при этом уменьщается вертикальная составляющая У , а следовател но, на меньщую величину уменьшается си9ла трения в опоре, т.е. уменьшается допустимая масса координатного стола. Как показывают теоретические исследования для увеличения устойчивости прямолинейного движения необходимо, чтобы геометрические оси пьезоэлементов пересекались в одной точке, совпадающей с проекцией центра тяжести устройства на плоскость, параллельную плоскости направляющей и проходящзто через эту точку. Причем достигается больший эффект, если точка каса- ния опоры направляющей располагается ближе к вертикальной оси, проходящей через центр тяжести, чем точка крепления пьезоэлементов к координатному столу, т.е. подвижные концы пьезоэлементов должны быть направлены в сторону центра тяжести координатного стола. Устройство содержит минимальное количество преобразователей цля перемещения координатного стола по трем координатам, требует простой схемы управления, обеспечивает высокую плавность перемещения за счет малой дискретности за один период управляющего напряжения (дискретность менее 0,1 мкм) и высокую скорость перемещения благодаря минимальному количеству (один) вспомогательных циклов (перемещение опоры). Формула изобретения Устройство для прецизионного перемещения изделий в плоскости по трем координатам, содержащее стол, направляющую и привод в виде электромеханических преобразователей, отличающееся тем, что, с целью упрощения конструкции и управления, повышения быстродействия и надежности, каждый из электромеханических преобразователей установлен под углом и Жестко прикреплен одним концом к координатному столу, причем геометрические оси преобразователей пересекаются в одной точке по вертикали, проходящей через центр тяжести стола. Источники информации, принятые во внимание при экспертизе: 1. Патент США № 3808488, Класс 310-8.2, 1973 г. 2„ Авторское свидетельство СССР № 295491 М. кл Н 01 V 7/00, от 1971г. (прототип).
ил
//////////// // /(//
/
J 1+
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для прецизионного перемещения | 1981 |
|
SU987717A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 1990 |
|
RU2050037C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД ИЛИ ДВИГАТЕЛЬ, СПОСОБ ПРИВЕДЕНИЯ ЕГО В ДЕЙСТВИЕ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 1997 |
|
RU2179363C2 |
| Устройство для прецизионного перемещения изделий | 1989 |
|
SU1713065A1 |
| Координатный вибропривод | 1979 |
|
SU851563A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДАТЧИК ДАВЛЕНИЯ | 1993 |
|
RU2065592C1 |
| СПОСОБ РАЗМЕРНОГО МИКРОШЛИФОВАНИЯ ИЗДЕЛИЙ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И ПРИСПОСОБЛЕНИЕ ДЛЯ КРЕПЛЕНИЯ ОБРАБАТЫВАЕМЫХ ИЗДЕЛИЙ | 2000 |
|
RU2165837C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МАНИПУЛЯТОР ДЛЯ ТУННЕЛЬНОГО МИКРОСКОПА | 1993 |
|
RU2061295C1 |
| СПОСОБ ГРАДУИРОВКИ ПЪЕЗОЭЛЕКТРИЧЕСКОГО АКСЕЛЕРОМЕТРА НА НИЗКИХ ЧАСТОТАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2519833C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ ОТНОСИТЕЛЬНО ВРАЩАЮЩЕЙСЯ СФЕРИЧЕСКОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2565359C1 |
G
/////7///// (//////
/
- Fi,
Фиг. 2
