Изобретение относится к точному приборостроению, может быть использовано в радиотехнике и микроэлектронике, в сборочном оборудовании, координатно-измерительных устройствах, в оптико-механических инструментах и других устройствах.
Известно устройство для прецизионного перемещения изделий, содержащее привод в виде пьезоэлектрических преобразователей, один из которых расположен в центре и предназначен для превращения статического опорного трения перемещаемого объекта в.кинетическое с помощью вибрации, а два других преобразователя смонтированы с противоположных сторон объекта на одной оси дляперемещения объекта в любом из двух противоположных направлений 1} .
Недостатками устройства являются сложная конструкция,, требующая прецизионной обработки деталей, а также устройство сложно в управлении, обладает невысокой надежностью, малым быстродействием, так как за одним рабочим циклом следуют два подготовительных.
Наиболее близким к предлагаемому является устройство для прецизионного перемещения, содержащее стол, направляющую и привод в виде злектромеханических преобразователей, каждый из которых установлен под углом и жестко прикреплен одним концом к столу,Причем геометрические оси преобразователей пересекаются в одной точ-. ке по вертикали, проходящей через центр тяжести стола 2 .
10
Однако устройство характеризуется низким быстродействием из-за недостаточной амплитуды колебаний электромеханических преобразователей, увеличение амплитуды которых вызывает поте15ри энергии. При этом при увеличенных амплитудах колебаний электромеханических преобразователей понижается плавность перемещения.
Цель изобретения - повышение быст20родействия и плавности перемещения.
Поставленная цель достигается тем, что в устройство для прецизионного перемещения, содержащее стол, направляющую и привод в виде электромеха25нических преобразователей, каждый из которых установлен под углом и жестко прикреплен одним концом к столу и геометрические оси которых пересекаются в одной точке по вертикали,
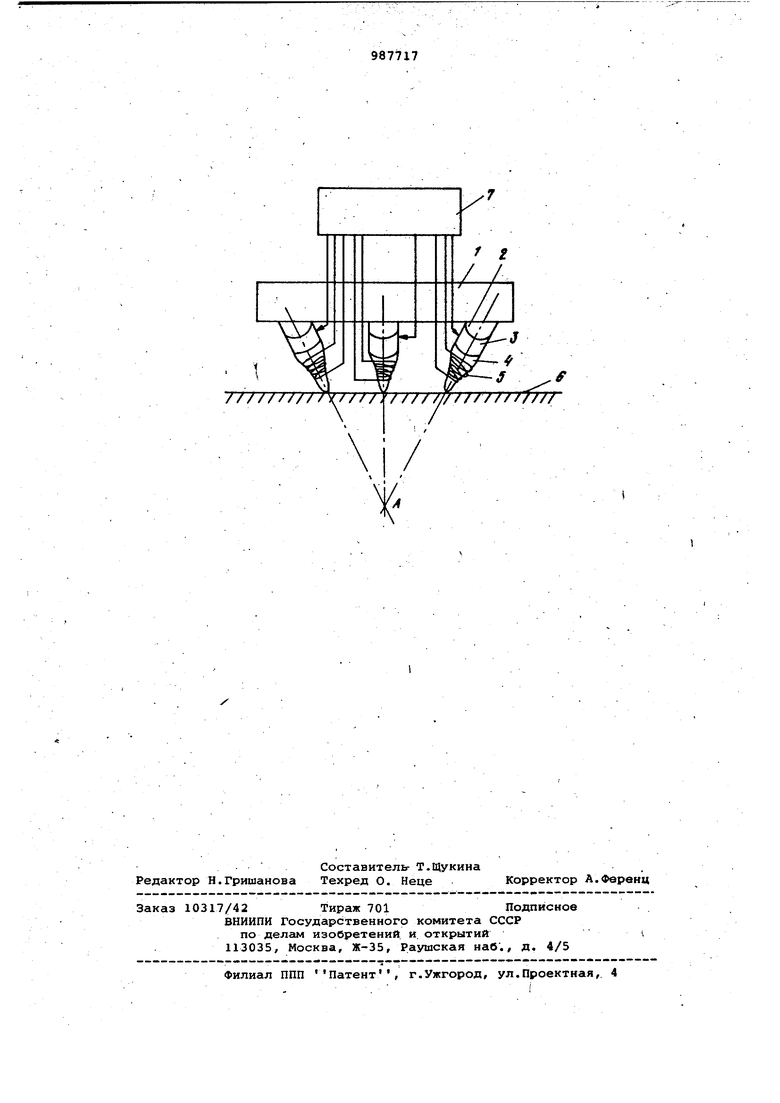
30 проходящей через центр тяжести стола введены концентраторы, прикрепленные к электромеханическим преобразователям и вершинами сопряженные с направ ляющей, причем концентраторы снабжены обмотками и являются якорем элект ромагнита, статором которого служит направляющая . На чертеже изображена схема предлагаемого устройства для прецизионного перемещения. Устройство для прецизионного перемещения содержит координатный стол 1 для его перемещения в плос- кости по координатам X, У и углу поворота о(,, представлякндий собой три ножки 2 с прикрепленными к нлм электромеханическими (пьезоэлектрическими) преобразователями 3, к которым торцами прикреплены концентраторы 4, например экспоненциальные, вершинами под острым углом сопряженные с направляющей 5, при этом геометрические оси симметрии ножек 2, проходящие через точку касания каждого из концентраторов 4, с направлякядей 5 пересека,ются в одной точке А по вертикали, проходящей через центр тяжести коор-. динатного стола 1. Концентраторы 4 снабжены обмотками 5 и являются якорем электромагнита, а направляющая б - статором Электромагнита. Выводы катушек электромагнитов подключены К блоку 7 управления, к которому также подключены и электроды электромеханических (пьезоэлектрических) пре.образователей 3. . . Устройство для преЦиЭионногЬ) перемещения работает следующим образом. При подаче высокочастотного напря.жения от блока 6 управления на электроды пьезоэлектрических преобразователей 3, последние начинают вибрировать и амплитуды их вибрации увели.чиваются - усиливаются концентратора ми 4. Так как ножки 2 (с электромеханическими преобразователями 3 и концентраторгми 4) выставлены поД углом к направляющей 5, то при их взаимодействии создается отталкивающая движущая сила и координатный стоЛ 1 начинает перемещаться. Меняя параметры питающего высокочастотного напряжения, подаваемого на электроды отдельных пьезоэлектрических преобразовате лей 3, обеспечивается перемещение координатного стола 1 по координатам X, У и углу повороти й1.Так как амплитуда вибрации пьезоэлектрического преобразователя3 увеличивается, то этим повышаетсгя быстродействие nepfмещения координатного стола 1 при тех же затратах- энергии. При подаче напряжения от блока б управления на катушки электромагнитов создается необ ходимое усилие прижатия координатного стола 1 (через концентраторы якорь 4 электромагнита) к направляющей 5 -- статору электромагнита, при этом усилие прижатия можно изменять. Выбором усилия прижатия (при помощи изменения напряжения питания электроагнитов) осуществляется установка режима по плавности перемещения коррдинатного стола 1. Применение концентраторов 4 в устройстве позволяет значительно повысить быстродействие перемещения, а выполнение их в качестве якоря электромагнита и направляющей 5 - в качестве статора электромагнита поЗволяет- регулировать плавность перемещения координатного стола 1. Проведенные экспериментальные исследования показали, что быстродействие перемещения повышено 2-3 раза при тех же затратах энергии, при этом осуществлена возможность регулирования плавности перемещения координатного стола. Формула изобретения Устройство для прецизионного перемещения , содержащее стол, направлянмцую и привод в виде электромеханических преобразователей, каждый из которых установлен под углом и жестко прикреплен одним концом к столу и герметические оси которых пересекаются в. одной точке по вертикали, проходящей через центр тяжести стола, отлич-ающеес я тем, что, с целью повышения его быстродействия и плавности перемещения, в устройство введены концентраторы, прикрепленные К электромеханическим преобразователям .и вершинам сопряженные с -направляющей, причем концентраторы снабжены обмотками и являются якорем электромагнита, статором которого служит направляющая. Источники информации, принятые во внимание при экспертизе 1. Патент США 3808488, кл. 3108.2, опублик. .1973. 2. Авторское свидетельство CCCJ 529509, кл. Н 01 L 21/66, 1975 (прототип).
У
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для прецизионного перемещения изделий | 1975 |
|
SU529509A1 |
| Координатный вибропривод | 1979 |
|
SU851563A1 |
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 1994 |
|
RU2080631C1 |
| Устройство для ориентации подложек | 1980 |
|
SU917365A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742949A2 |
| МОБИЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 1999 |
|
RU2164362C2 |
| Зеркальное скинирующее устройство | 1983 |
|
SU1151907A1 |
| СТАНОК ДЛЯ УЛЬТРАЗВУКОВОЙ ОБРАБОТКИ | 1960 |
|
SU130328A1 |
| Сканирующее устройство | 1980 |
|
SU949618A1 |
| КООРДИНАТНЫЙ СТОЛ | 1992 |
|
RU2029447C1 |