Изобретение относится к области машиностроения, а более конкретно к устройствам для прецизионного перемещения изделий.
Известное.устройство для прецизионного перемещения изделий содержит стол, направляющую и привод выполненный в виде пьезоэлектрических преобразовате/1ей, установленных под углом и жестко прикрепленных одними концами к столу.
Недостатками известного устройства являются малые кинематические возможности, так как прецизионное перемещение осуществляется только в плоскости по трем координатам. «
Цель изобретения - расширение кинематических возможностей устройства.
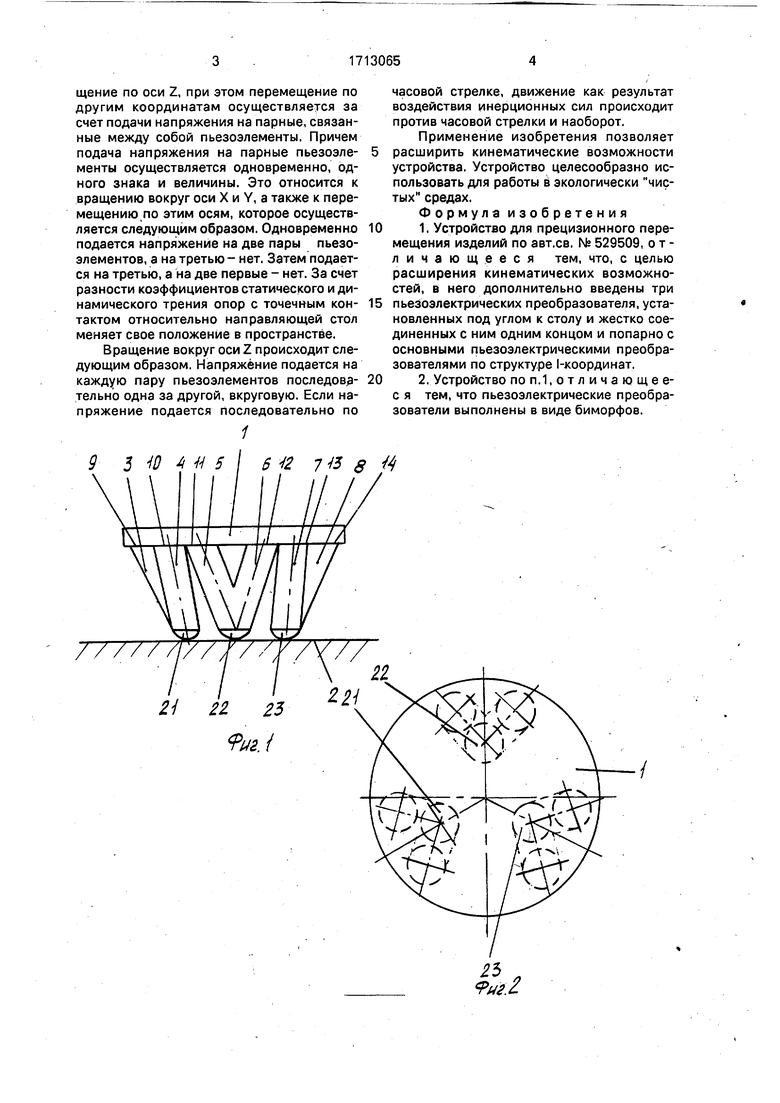
На фиг.1 показано устройство для прецизионного перемещения изделий, вид сбоку; на фиг.2 то же, вид сверху; на фиг.З то же, вид сбоку с пьезоэлектрическими преобразователями в виде биморфов.
сл
с
Устройство для Ирецизионного перемещения изделий (фиг.1, 2) содержит стол 1, направляющую 2, привод, выполненный в виде шести пьезоэлектрических преобразователей 3-8, жестко прикрепленных одними концами 9-14 к столу 1. Пьезоэлектрические . преобразователи 3-8 связаны со столом 1 и попарно с направляющей 2 по .структуре 1-координат.- Пьезоэлектрические преобразователи могут быть также выполнены в виде биморфов (фиг.З) 15-20 (пьезопластин, закрепленных наметаллических пластинах). Во всех случаях преобразователи связаны с направляющей 1 посредством опор сточенным контактом 21-23.
Устройство для прецизионного перемещения изделий работает следующим образом.
При подаче напряжения на пьезоэлектрические преобразователи фиг.1-8 последние деформируются (уменьшаются или увеличиваются в длине)происходит перемещение по оси Z, при этом перемещение по другим координатам осуществляется за счет подачи напряжения на парные, связанные между собой пьезоэлементы. Причем подача напряжения на парные пьезоэлементы осуществляется одновременно, одного знака и величины. Это относится к вращению вокруг оси X и Y, а также к перемещению,по этим осям, которое осуществляется следующим образом. Одновременно подается напряжение на две пары пьезоэлементов, а на третью- нет. Затем подается на третью, а на две первые - нет. За счет разности коэффициентов статического и динамического трения опор с точечным контактом относительно направляющей стол меняет свое положение в пространстве.
Вращение вокруг оси Z происходит следующим образом. Напряжение подается на каждую пару пьезоэлементов последов тельно одна за другой, вкруговую. Если напряжение подается Последовательно по
/
часовой стрелке, движение как результат воздействия инерционных сил происходит против часовой стрелки и наоборот.
Применение изобретения позволяет расширить кинематические возможности устройства. Устройство целесообразно использовать для работы 6 экологически чистых средах.
Формула и зобретени я 1. Устройство для прецизионного перемещения изделий по авт.св. № 529509, отличающееся тем, что, с целью расширения кинематических возможностей, в него дополнительно введены три пьезоэлектрических преобразователя,установленных под углом к столу и жестко соединенных с ним одним концом и попарно с основными пьезоэлектрическими преобразователями по структуре 1-координат. 2. Устройство по П.1, о т л и ч а ю щ е ес я тем, что пьезоэлектрические преобразователи выполнены в виде биморфов.
2Ь .2.
/f i6 /7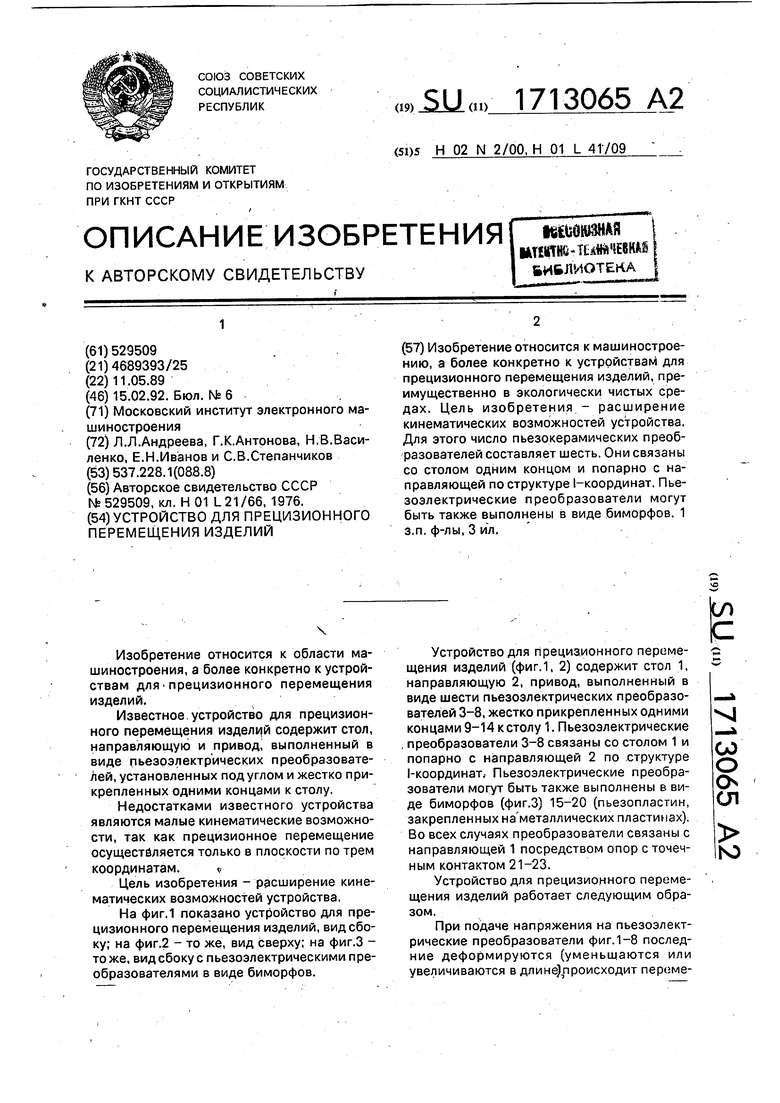
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 1999 |
|
RU2164362C2 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 2001 |
|
RU2221324C2 |
| Устройство для прецизионного перемещения изделий | 1975 |
|
SU529509A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МАНИПУЛЯТОР ДЛЯ ТУННЕЛЬНОГО МИКРОСКОПА | 1993 |
|
RU2061295C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2004 |
|
RU2286001C2 |
| Устройство прецизионного позиционирования | 1979 |
|
SU864386A1 |
| Пьезоэлектрический преобразователь кантилеверного типа механической энергии в электрическую | 2015 |
|
RU2623445C1 |
| Устройство для прецизионного перемещения | 1981 |
|
SU987717A1 |
| Трехкомпонентный пьезоэлектрический датчик | 1986 |
|
SU1402986A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 1990 |
|
RU2050037C1 |

Изобретение относится к машиностроению, а более конкретно к устройствам для прецизионного перемещения изделий, преимущественно в экологически чистых средах. Цель изобретения - расширение кинематических возможностей устройства. Для этого число пьезокерамических преобразователей составляет шесть. Они связаны со столом одним концом и попарно с направляющей по структуре 1-координат. Пьезоэлектрические преобразователи могут быть также выполнены в виде биморфов. 1 з.п. ф-лы, 3 ил.
| Устройство для прецизионного перемещения изделий | 1975 |
|
SU529509A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
