Изобретение относится к области измерительной техники, в частности к способам и устройствам для определения чувствительности пьезоэлектрических акселерометров на низких частотах.
Диапазон частот виброускорений, составляющий доли, единицы герц, весьма информативен для оценки технического состояния промышленных объектов, анализа сейсмических процессов и других видов механических возмущений. Изменение чувствительности средств измерений в указанном диапазоне частот (амплитудно-частотная характеристика акселерометра) влияет в итоге на точность измерения ускорения, поэтому необходимо для каждого акселерометра ее определять с целью получения фактических значений чувствительности.
Известны способ и устройства градуировки акселерометров в вибрационном режиме с использованием электродинамических вибростендов. Например, калибратор типа 4294 фирмы Брюль и Къер (Дания) воспроизводит на фиксированной частоте 159,2 Гц колебательное ускорение величиной 1g с погрешностью ±3%. Вибростенд для калибровки типа 4290 той же фирмы воспроизводит колебательное ускорение величиной 0.1g в диапазоне частот 200 Гц - 20 кГц с погрешностью ±11% [Bruel & Kjer, Product Catalogue June 2004]. Недостатком данного способа является невозможность обеспечения градуировки акселерометров на низких частотах и значительная погрешность воспроизведения единицы ускорения.
Известны также способ и устройство калибровки, реализованные в калибровочном стенде APS 113-АВ фирмы SPEKTRA (Германия) с линейным перемещением платформы, на которой закрепляется акселерометр. Стенд обеспечивает параметры колебательных смещений: частота 0,2 Гц, ускорение 0.013 g, размах смещения - 0,158 м. Соответственно, для частоты 1 Гц - ускорение 0.32 g, размах - 0,158 м [APS Dynamics, Products & Services, 2008].
Недостатком данного способа градуировки является низкий уровень воспроизводимого стендом ускорения - сотые доли «g», большой размах колебаний стола, что вносит дополнительную погрешность в градуировку из-за паразитного сигнала с пьезоакселерометра вследствие пироэффекта, возникающего вследствие трения о воздух градуируемого акселерометра.
В установках с линейным перемещением платформы проявление пироэффекта в пьезоэлементах от трения акселерометра о воздух можно характеризовать (согласно теории пограничных слоев) квадратичной зависимостью от скорости смещения.
Для колебательного движения известна зависимость:

где: V - скорость смещения (м/с);
f - частота (Гц);
S - амплитуда смещения (м).
Тогда электрический заряд от пироэффекта на электродах пьезоэлемента будет иметь следующую пропорциональность:

где: Q - электрический заряд (Кл);
f - частота (Гц);
S - амплитуда смещения (м);
А - коэффициент пирочувствительности.
Из (2) видно, что при прочих равных условиях, паразитный электрический заряд, наводимый от проявления пироэффекта, будет пропорционален квадрату амплитуды смещения.
Согласно (2) пироэлектрический заряд при калибровке на установках с линейным перемещением платформы для f=1 Гц и S=0,079 м составит величину Q~0,25A.
Известен способ градуировки пьезоэлектрических акселерометров путем поворота в гравитационном поле земли и устройство для его осуществления (см. АС №1295344 от 14.01.85, опубликованное в БИ №9 от 07.03.87). Способ заключается в том, что акселерометр поворачивают в гравитационном поле Земли с помощью поворотной платформы из горизонтального положения его оси чувствительности на заданный угол относительно плоскости горизонта и измеряют с помощью измерительной цепи изменение выходного напряжения пьезоакселерометра на добавочной электрической емкости, подсоединенной к его выходу. Предварительно замыкают накоротко выход акселерометра, с началом поворота размыкают его, и подсоединяют к измерительной цепи, а приращение выходного напряжения акселерометра измеряют за время поворота на заданный угол, меньшее постоянной времени измерительной цепи. В этом способе отсутствует устройство воспроизведения единицы ускорения и, как следствие, дополнительная погрешность. Абсолютное значение ускорения свободного падения (≈9,8 м/с2) в привязке к конкретной географической точке Земли известно с очень большой точностью, поэтому погрешность градуировки будет формироваться только средствами измерения электрических величин.
Вышеуказанные способ и устройство являются наиболее близкими по технической сущности к заявляемому способу и устройству, и поэтому выбраны в качестве прототипа.
Недостатками вышеуказанного способа и устройства являются:
- чувствительность градуируемого акселерометра к центробежным силам при вращении;
- невозможность определения чувствительности акселерометра в диапазоне низких частот.
Уровень влияния центробежных сил по вышеуказанному способу можно оценить из известной зависимости:

где: α - ускорение (м/с2);
f- частота вращения (Гц);
L - плечо от оси вращения до центра масс инерционного элемента акселерометра (м).
Даже при весьма незначительных габаритных параметрах акселерометра и размерах поворотной платформы, реализующих L≈0,05 м, согласно (3), для частоты f=0,5 Гц, на пьезоэлемент акселерометра будет действовать сила, соответствующая ускорению α≈0,5 м/с2, а для частоты f=1 Гц - ускорению α≈2 м/с2, что вносит погрешность по отношению к ускорению свободного падения соответственно 5% и 20%, переносимую соответственно в расчет чувствительности акселерометра.
Решаемой технической задачей является создание более точного способа градуировки пьезоэлектрического акселерометра в поле ускорения свободного падения на низких частотах и устройство для его осуществления.
Достигаемым техническим результатом является уменьшение погрешности калибровки, вызванной действием центробежных сил.
Для достижения технического результата, в способе градуировки пьезоэлектрических акселерометров на низких частотах, заключающемся в том, что акселерометр поворачивают в гравитационном поле Земли с помощью поворотной платформы и измеряют с помощью измерительной цепи выходное напряжение акселерометра, новым является то, что предварительно устанавливают на поворотную платформу акселерометр с его осью чувствительности в вертикальной плоскости под любым углом к горизонтальной оси, совмещают центр масс инерционного элемента акселерометра с осью вращения, меняя частоту вращения, поворачивают акселерометр на угол более 360° на каждой частоте, определяют максимальные значения выходных сигналов на каждой из частот, по которым определяют коэффициенты преобразования для построения амплитудно-частотной характеристики акселерометра в области низких частот.
Для достижения технического результата в поворотной установке, содержащей основание, на котором установлена посредством опор вращения платформа, новым является то, что платформа состоит из вала и насадки, которая имеет горизонтальную площадку для крепления испытуемого акселерометра, при этом насадка установлена с возможностью перемещения в плоскости, перпендикулярной оси вала, на торцевой поверхности вала нанесена координатная сетка для фиксации их взаимного положения в плоскости сопряжения.
Новая совокупность существенных признаков в заявляемом способе и устройстве позволяет повысить точность градуировки акселерометра за счет уменьшения погрешности калибровки, вызванной действиями центробежных сил, и практически снять ограничения по реализации минимальной частоты градуировки.
Способ реализуется устройством, представленным на фигуре 1.
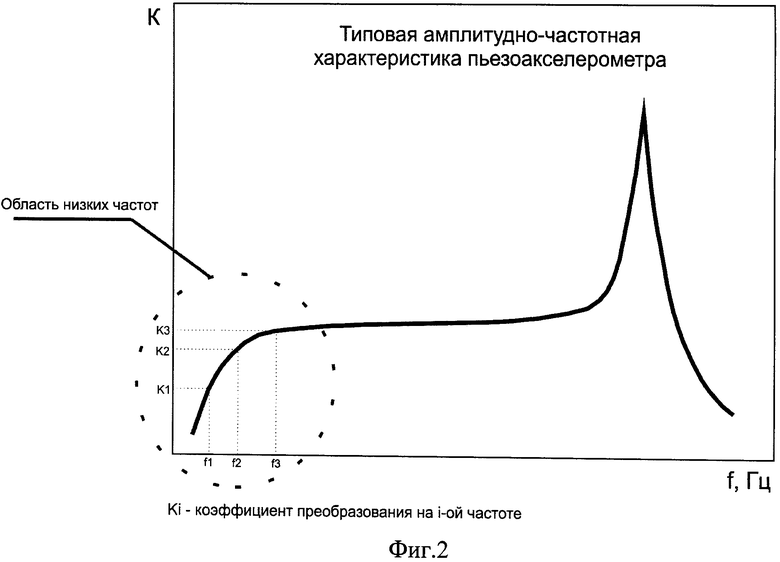
На фигуре 2 представлена типовая амплитудно-частотная характеристика акселерометра, на которой выделена область низких частот, в которой реализован данный способ.
Поворотная установка содержит основание 1, на котором установлена посредством опор вращения 2 платформа 3, которая состоит из вала 4 и насадки 5, имеющей горизонтальную площадку 6 для крепления испытуемого акселерометра 7, при этом насадка 5 установлена с возможностью перемещения в плоскости, перпендикулярной оси вала, на торцевой поверхности вала нанесена координатная сетка 8 для фиксации их взаимного положения в плоскости сопряжения.
Соединение насадки с валом со стороны плоской ее части выполнено с возможностью их относительного смещения (например, при помощи магнита 9), что позволяет перемещать закрепленный на горизонтальной площадке насадки акселерометр и совмещать центр масс инерционного элемента 10 акселерометра с осью вращения вала 11. Тем самым реализуется нечувствительность акселерометра к действию центробежных сил и повышение точности градуировки. Способ реализуется следующим образом.
Способ градуировки пьезоэлектрического акселерометра в гравитационном поле Земли на низких частотах заключается в том, что акселерометр закрепляют на горизонтальной площадке насадки, совмещают центр масс инерционного элемента 10 пьезоэлектрического акселерометра с осью 11 вращения платформы 3, после чего непрерывно поворачивают вал и акселерометр 7 на угол более 360 градусов на каждой необходимой частоте, определяют максимальные значения выходных сигналов на каждой из частот, по которым определяют коэффициенты преобразования для построения амплитудно-частотной характеристики акселерометра в области низких частот.
Оценку возможного влияния пироэффекта в предлагаемом способе от поворота акселерометра в гравитационном поле Земли можно выполнить, использую известную зависимость

где: V - линейная скорость вращения по окружности (м/с);
f - частота (Гц);
R - радиус вращения (м).
Для акселерометра с размером по высоте ≈3 см радиус R наиболее удаленной части конструкции составит ≈1,5 см, тогда, согласно (2) и (4) для f=1 Гц:

Можно видеть, что для одной и той же частоты (f=1 Гц) генерируемый электрический заряд при повороте акселерометра в гравитационном поле земли при совмещении с осью вращения центра масс инерционного элемента, по сравнению с установками с линейным перемещением платформы (Q~0,25A), меньше почти в 20 раз.
Предлагаемый способ градуировки пьезоэлектрических акселерометров и устройство для его осуществления на низких частотах позволяет уменьшить погрешность калибровки, вызванную действиями центробежных сил, а также обеспечить, меняя частоту вращения, определение амплитудно-частотной характеристики.
В сравнении со способом, реализованном в калибровочном стенде APS 113-АВ фирмы Spektra, заявляемый способ, позволяет практически снять ограничения по минимальной частоте определения АЧХ, а также исключить дополнительную погрешность от воспроизведения задаваемой величины ускорения.
Был изготовлен опытный образец, который подтвердил практическое осуществление заявленного способа и устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников | 2019 |
|
RU2757971C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПЕРЕЧНОЙ ЧУВСТВИТЕЛЬНОСТИ АКСЕЛЕРОМЕТРА | 2014 |
|
RU2596778C2 |
| СПОСОБ ГРАДУИРОВКИ АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165088C1 |
| Способ градуировки пьезоэлектрических акселерометров | 1985 |
|
SU1295344A1 |
| Способ поверки гравиинерциальных приборов и устройство для его осуществления | 1990 |
|
SU1756844A1 |
| СПОСОБ ДИСТАНЦИОННОЙ КАЛИБРОВКИ АКСЕЛЕРОМЕТРА В СОСТАВЕ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2272299C1 |
| Способ определения амплитудно-частотной характеристики акселерометра | 1984 |
|
SU1163276A1 |
| Способ градуировки низкочастотных линейных акселерометров | 1987 |
|
SU1540494A1 |
| Установка для градуировкиАКСЕлЕРОМЕТРОВ | 1979 |
|
SU853557A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК АКСЕЛЕРОМЕТРОВ НА ЦЕНТРИФУГЕ | 2001 |
|
RU2192016C1 |
Изобретение относится к области измерительной техники, в частности к способам и устройствам для определения чувствительности пьезоэлектрических акселерометров на низких частотах. Сущность способа градуировки пьезоэлектрического акселерометра на низких частотах заключается в том, что акселерометр поворачивают в гравитационном поле Земли с помощью поворотной платформы и измеряют с помощью измерительной цепи выходное напряжение акселерометра, при этом предварительно устанавливают на поворотную платформу акселерометр с его осью чувствительности в вертикальной плоскости под любым углом к горизонтальной оси, совмещают центр масс инерционного элемента акселерометра с осью вращении, меняя частоту вращения, поворачивают акселерометр на угол более 360° на каждой частоте, определяют максимальные значения выходных сигналов на каждой из частот, по которым определяют коэффициенты преобразования для построения амплитудно-частотной характеристики акселерометра в области низких частот. Поворотная установка содержит основание, на котором установлена посредством опор вращения платформа, которая состоит из вала и насадки, имеющей горизонтальную площадку для крепления испытуемого акселерометра, при этом насадка установлена с возможностью перемещения в плоскости, перпендикулярной оси вала, на торцевых поверхностях вала нанесена координатная сетка для фиксации их взаимного положения в плоскости сопряжения. Технический результат: уменьшение погрешности калибровки, вызванной действием центробежных сил. 2 н.п. ф-лы, 2 ил.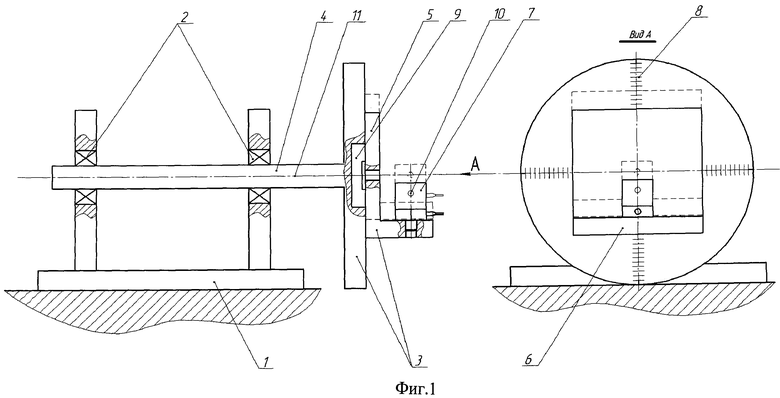
1. Способ градуировки пьезоэлектрического акселерометра на низких частотах, заключающийся в том, что акселерометр поворачивают в гравитационном поле Земли с помощью поворотной платформы и измеряют с помощью измерительной цепи выходное напряжение акселерометра, отличающийся тем, что предварительно устанавливают на поворотную платформу акселерометр с его осью чувствительности в вертикальной плоскости под любым углом к горизонтальной оси, совмещают центр масс инерционного элемента акселерометра с осью вращении, меняя частоту вращения, поворачивают акселерометр на угол более 360° на каждой частоте, определяют максимальные значения выходных сигналов на каждой из частот, по которым определяют коэффициенты преобразования для построения амплитудно-частотной характеристики акселерометра в области низких частот.
2. Поворотная установка, содержащая основание, на котором установлена посредством опор вращения платформа, отличающаяся тем, что платформа состоит из вала и насадки, имеющей горизонтальную площадку для крепления испытуемого акселерометра, при этом насадка установлена с возможностью перемещения в плоскости, перпендикулярной оси вала, на торцевых поверхностях вала нанесена координатная сетка для фиксации их взаимного положения в плоскости сопряжения.
| ПОВОРОТНАЯ УСТАНОВКА | 2004 |
|
RU2267749C1 |
| СПОСОБ ГРАДУИРОВКИ АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165088C1 |
| Способ градуировки низкочастотных линейных акселерометров | 1987 |
|
SU1540494A1 |
| Способ градуировки линейных акселерометров | 1984 |
|
SU1312489A1 |
| Способ градуировки пьезоэлектрических акселерометров | 1985 |
|
SU1295344A1 |

