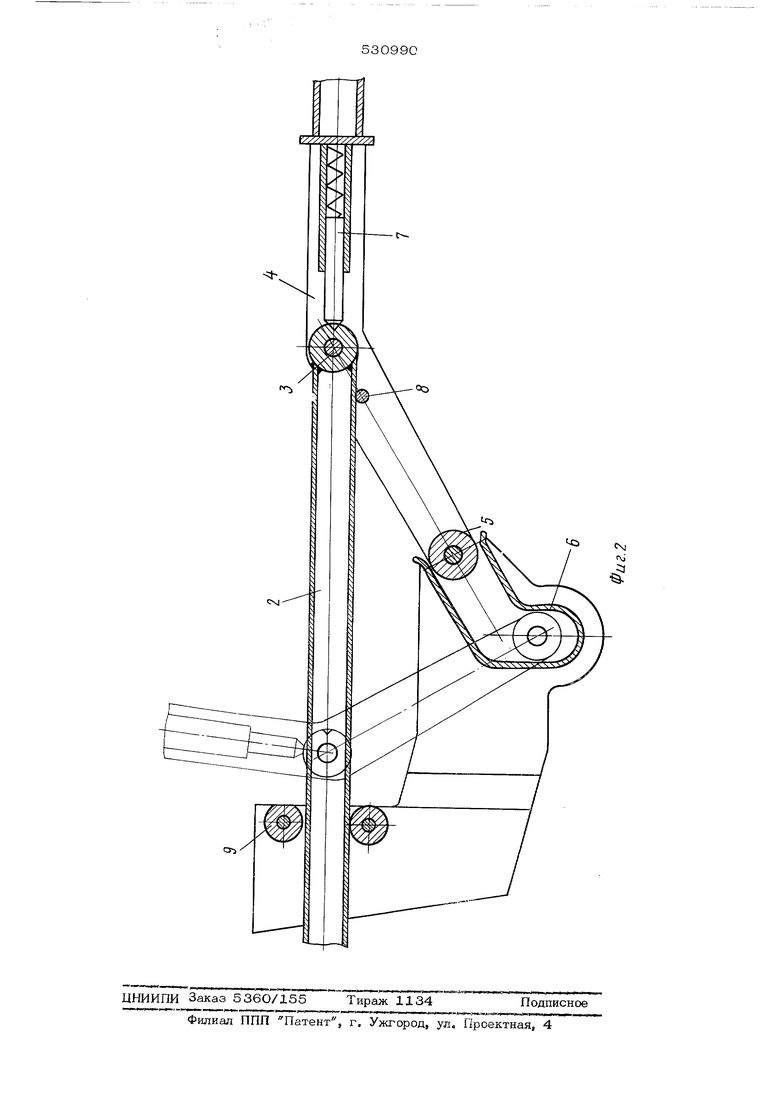
Изобретение относится к трубопроводно арматуре, в частности к механизмам упра ления работой устройств для отвода газов сухой перегонки из стояков коксовых пече Известны механизмы управленич работой клапанов, содержащие рабочий орган в виде толкателя, кинематически связанный с принудительно подвижной в осевом направлении тягой привода. Недостатком таких механизмов являет ся длительное время срабатывания иэ-за значительного расстояния между механизмом управления к клапаном пароинжекции стояков коксовых печей. В предлагаемом механизме управления клапаном для сокращения времени срабатывания толкатель выполнен в виде двупле чего рычага и установлена фигурная направляаощая, а двуплечий рычаг шарнирно соединен с тягой привода и кондом одного из плеч, взаимодейтсвую.ш:им с фигурной направляющей. На фиг, 1 изображен предлагаемый механизм управления клапаном, общий вид; на фиг, 2 - узел соединения рабочего органа с тягой и фигурной направляющей. Л еханизм управления клапаном вкл1с чает в себя шатунно-кривошипный привод, который посредством тяги 2 и шарнира 3 связан с рабочим органом 4, выполненным в виде двуплечего рычага Г-образной формы, один конец которого, снабженный роликом 5, установлен в фигурной направляющей 6. Для ограничения углового перемещения рабочий орган 4 имеет фиксатор 7 и упор 8. Прямолинейное движение тяги 2 обеспечивается с помощью направляющих 9. Устройство работает следующим образом. При вращении кривошипа, например, из исходного положения А, движение посредством тяги 2 передается рабочему органу 4, который перемещается в направлении управляемого клапана с одновременным вращением вокруг шарнира 3 до тех пор, пока ролик 5 не выйдет из направляющей 6. Выйдя из направляющей 6, рабочий орган 4 фиксируется относительно тяги 2 с помощью пружинного фиксатора 7 и упора 8 и продолжает движение вместе с ней
прямолинейно до положения Б, соответсвующего открытому положению клапана пароинжекыии,
При дальнейшем вращении кривошипа в том же направлении происходит закрытие клапана. При этом рабочий орган 4, перемещаясь в обратном направлении, движет ся вместе с тягой 2 прямолинейно до попадания ролика 5 в фигурную направляющую 6, после чего характер его движения :изменяется, одновременно с поступательным движением рабочий орган 4 вращает ся вокруг шарнира 3 до тех пор, пока кри)вошип не займет исходное положение А,
На этом цикл работы механизма управления клапаном заканчивается.
Формула изобретения Механизм управления клапаном, в котором рабочий орган в виде толкателя кинематически связан с принудительно подвижной в осевом направлении тягой, отличающийся тем, что, с целью сокращения времени срабатывания, в нем толкатель выполнен в виде двуплечего рычага и установлена фигурная направляющая, а двуплечий рычаг шарнирно соединен с тягой привода и концом одного из плеч, взаимодействующим с фигурной направляющей.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного управления запорной арматурой | 1980 |
|
SU943466A1 |
| Устройство для автоматической подачи заготовок и выдачи готовых задников к машине для формования задников | 1955 |
|
SU107378A1 |
| Автоматический штамповочный комплекс для изготовления деталей из полосы и устройство для отделения от стопы полосы и подачи ее в рабочую зону пресса | 1990 |
|
SU1756000A1 |
| УСТРОЙСТВО для чистки стояков коксовых ПЕЧЕЙ | 1970 |
|
SU280432A1 |
| Устройство для управления стояками коксовых печей | 1982 |
|
SU1129219A1 |
| Устройство для закрывания клапанов картонного ящика | 1981 |
|
SU1006311A1 |
| Механизм привода транспортера кормораздатчика | 1989 |
|
SU1644844A1 |
| Устройство для почвенного внесения минеральных удобрений | 1985 |
|
SU1322999A1 |
| МАШИНА ДЛЯ ОЧИСТКИ БЕРД | 1971 |
|
SU307132A1 |
| УСТРОЙСТВО для чистки СЕДЕЛ И КРЫШЕК КЛАПАНОВ СТОЯКОВ КОКСОВЫХ ПЕЧЕЙ | 1973 |
|
SU382668A1 |

ХхХхЯ
2
X
