1
Изобретение относится к автоматике и может найти широкое применение для построения высокоточных следящих систем.
известны устройства комбинироваршого управления в которых благодаря отсутст- ВИЮ противоречий между условиями устойчивости и инвариантности возможно достижение высокой точности регулирования. Дл построения устройств комбинированного управления требуется непосредственное измерение управляющего воздействия и его произвош ых 1 ,
Трудности, связанные с практической реализацией измерения производных управляющего воздействия, не позволяют пол- костью устранить динамические ошибки в устройствах комбинированного управления.
Известны также устройства с неединичной обратной связью, используемой для уменьщения ошибки, вызванной управляющи воздействием в замкнутой системе регулирования 2.,
В устройствах такого вида регулируема велич -ша у {t ) поступает на блок сравнения по главной обратной связи с передаточной функцией, не равной единице, т, е, Ч (Р) /- 1. Для получения полной инвариантности в качестве передаточной функции главной обратной связи необходимо иметь:
vvcp-i)
(О
Ф(р)
W(p)
При разложении этого выражения в степенной ряд получаем:
ф(р) ( + ... ). (2.)
Отсюда видно, что для получен полной инвариантности необходимо использовать главную обратную связь с коэффициентом передачи, в общем случае отличным от единицы: оQ / 1 (в астатических системах о 1), и дополнительно ввести положительные обратные связи по производным от регулируемой велич -шы.
Реализация полной инвариантности, т. е. реализация условия (1), практически невозможна из-за невозможности точного введения высших производных (2), а также из-за того, что при выполнении условия
(1) система будет находиться на границе устойчивости.
Из известных устройств автоматического регулирования наиболее близким по технической сущности является устройство, содержащее первый фиксатор и последовательно соединенные первый сумматор, усилитель и исполнительный механизм, выход которого соединен со вторым входом первого сумматора и входом тахогеноратора, выход которого соединен со входом дифференциатора и с первым входом второго сумматора, выход которого соединен с первым входом второго фиксатора, второй вход которого соединен с генератором импульсов, а выход - со вторым входом усилителя 3 Экспериментальные исследования указанного устройства показали, что при изменении частоты задающего воздействия возрастает величина ошибки устройства. Возрастание величкшы ошибки вызвано появлением сдвига между фазами сигнала Охлибки и корректирующего сигнала. Другими словами, из-за нелинейности амплитудочастотных характеристик дифференцирующих звеньев в данном устройстве наблюдается переком пенсация или недокомпенсация сигнала ошибки корректируемой системы.
Цель изобретения - повышение точности работы устройства независимо от частоты задающего воздействия.
Поставленная цель достигается тем, что в устройстве автоматического управления установлены модулятор и последовательно соединенные нуль-орган, вход которого соединен с выходом тахогенератора, и генератор пилообразного напряжения, выход которого соединен с первым входом первого фиксатора, второй вход которого соединен с выходом нуль-органа, а выход с управляющими входами модулятора и дифференциатора, которого через модулятор соединен со вторым входом второго сумматора.
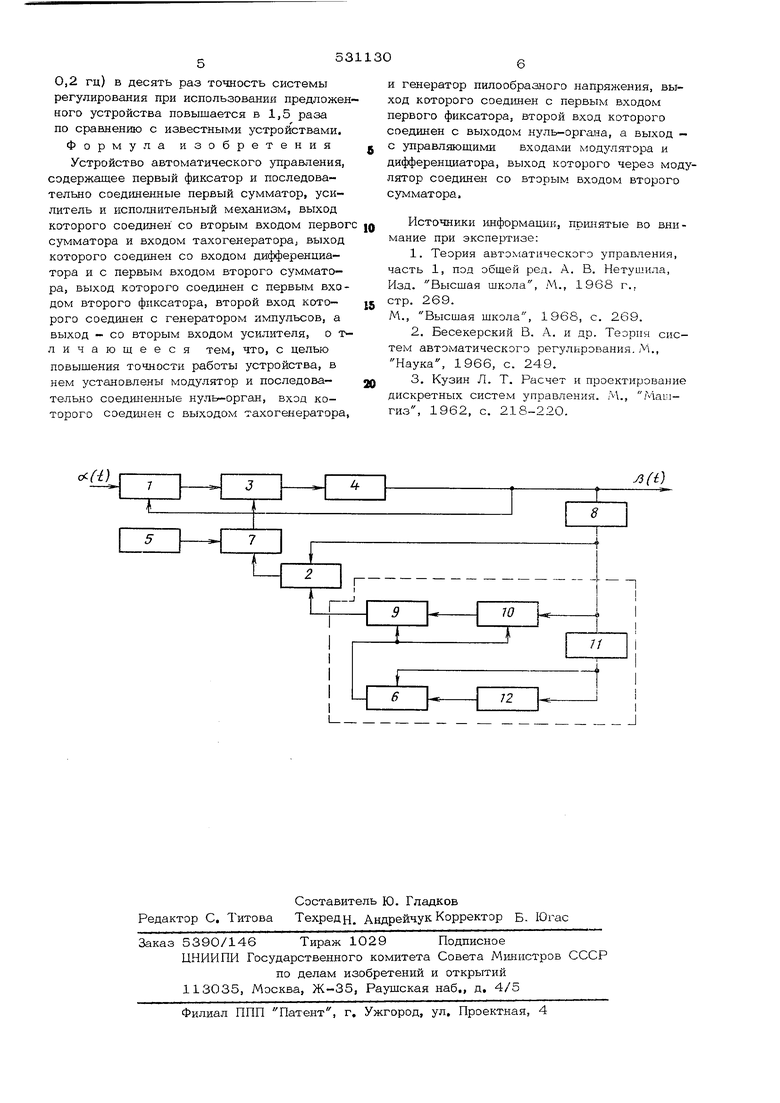
На чертеже изображена блок-схема устройства автоматического управления.
Устройство содержит первый и второй сумматоры 1 и 2, усилитель 3, испо/шительный механизм 4, генератор импульсов 5, первый и второй фиксаторы 6 и 7, тахогенератор 8, модулятор 9, дифференциатор 10, нуль-орган 11, генератор пилообразного напряжения 12.
Устройство работает следующим образом При изменении частоты задающего воздействия изменяется также частота сигнала на выходе тахогенератора 8. Нульорган 11 фиксирует моменты прохождения сигнала на выходе тахогенератора 8 через нуль в виде кратковременных импульсов
прямоугольной формы положительной полярности, частота которых обратно пропорциональна полупериоду задающего воздействия Передним фронтом такого импульса произJJ водится управление запоминанием напряжения генератора пилообразного напряжения 12 на первом фиксаторе 6, а задним обнуление сигнала на выходе генератора пилообразного напряжения 12 с последуюJQ щим запуском его, К моменту появления слудующего импульса на выходе нуль-органа 11 напряжение на выходе генератора пилообразного напряжения 12 пропорционально полупериоду задающего воздействия
5 Процесс управления запоминанием напряжения генератора пилообразного напряжени 12 на первом фиксаторе 6 и обнуление сиг нала на выходе генератора пилообразного напряжения 12 с последующим его запуско
20 повторяется с приходом каждого импульса с выхода нуль-органа 11, Таким образом, на выходе фиксатора 6 формируется сигнал, пропорциональный частоте задающего воздействия. Этот сигнал подается на управляющие входы модулятора 9 и дифференциатора 10, Постоянную времени дифференциатора 10, который может быть построен например, на элементах, можно изменять, управляя величиной переменного со-
30 противления, в качестве которого может быть использован варистор. При изменении постоянной времени дифференциатора 10 путем изменения величины переменного сопротивления, изменяется и коэффициент пе-35 реднего сопротивления, изменяется коэффициент передачи дифференциатора 10, Для учета изменения коэффициента передачи ди4)ференциатора 10 служит модулятор 9, коэффициент передачи которого изменяется
40 при изменении частоты задающего воздействия, т, е, сигнала на выходе фиксатора 6 В данном устройстве усилитель 3 выполняет функции сумматора - усилителя. Второй фиксатор 7, управляемый генератором
импульсов 5, служит для запоминания величины с выхода второго сумматора 2 на период следования импульсов с выхода генератора импульсов 5, Запоминание сигнала с выхода сумматора 2 выполняется в
50 момент наличия импульсов с выхода генератора импульсов 5.
Новый положительный эффект при использовании предложенного устройства заключается в существенном повышении точности системы путем управления фазой корректирующего сигнала при изменении частоты задающего воздействия. Экспериментальные исследования показали, что при изменении (возрастании) частоты заgQ дающего воздействия (исходная частота
0,2 гц) в десять раз точность системы регулирования при использовании предложенного устройства повышается в 1,5 раза по сравнению с известными устройствами. Формула изобретения
Устройство автоматического управления, содержащее первый фиксатор и последовательно соединенные первый сумматор, усилитель и исполнительный механизм, выход которого соединен со вторым входом первог сумматора и входом тахогенератора, выход которого соединен со входом дифференциатора и с первым входом второго сумматора, выход которого с первым входом второго фиксатора, второй вход которого соединен с генератором импульсов, а выход - со вторым входом усилителя, о т- личающееся тем, что, с целью повышения точности работы устройства, в нем установлены модулятор и последова- тельно соедш-юнные нуль-орган, вход которого соед1-шен с выходом тахогенератора,
и генератор пилообразного напряжения, выход которого соед1шен с первым входом первого фиксатора, второй вход которого соединен с выходом нуль-органа, а выход с управляющими входами модулятора и дифференциатора, выход которого через модлятор соединен со вторым входом второго сумматора.
Источники информации, пр1шятые во внимание при экспертизе:
1.Теория автоматического управления, часть 1, под обш.ей ред. А. В. Натушила, Изд. Высшая школа, М., 1968 г..
стр. 269.
М., Высшая школа, 1968, с. 269.
2.Бесекерский В. А. и др. Теория систем автоматического регулирования. У., Наука, 1966, с. 249.
3.Кузин Л. Т. Расчет и проектирование дискретных систем управления. М., Maiuгиз, 1962, с. 218-22О.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления | 1973 |
|
SU465620A1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| Следящая система | 1975 |
|
SU550617A1 |
| Устройство для регулирования температуры | 1987 |
|
SU1418669A1 |
| Устройство для стабилизации частоты вращения электродвигателя (его варианты) | 1980 |
|
SU1053247A1 |
| Следящая система | 1978 |
|
SU711538A1 |
| Интегрирующий привод | 1974 |
|
SU467325A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Устройство для регулирования частоты колебаний платформы | 1978 |
|
SU752254A1 |
| СИСТЕМА БЛИЖНЕЙ ЛОКАЦИИ ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2013 |
|
RU2535302C1 |
