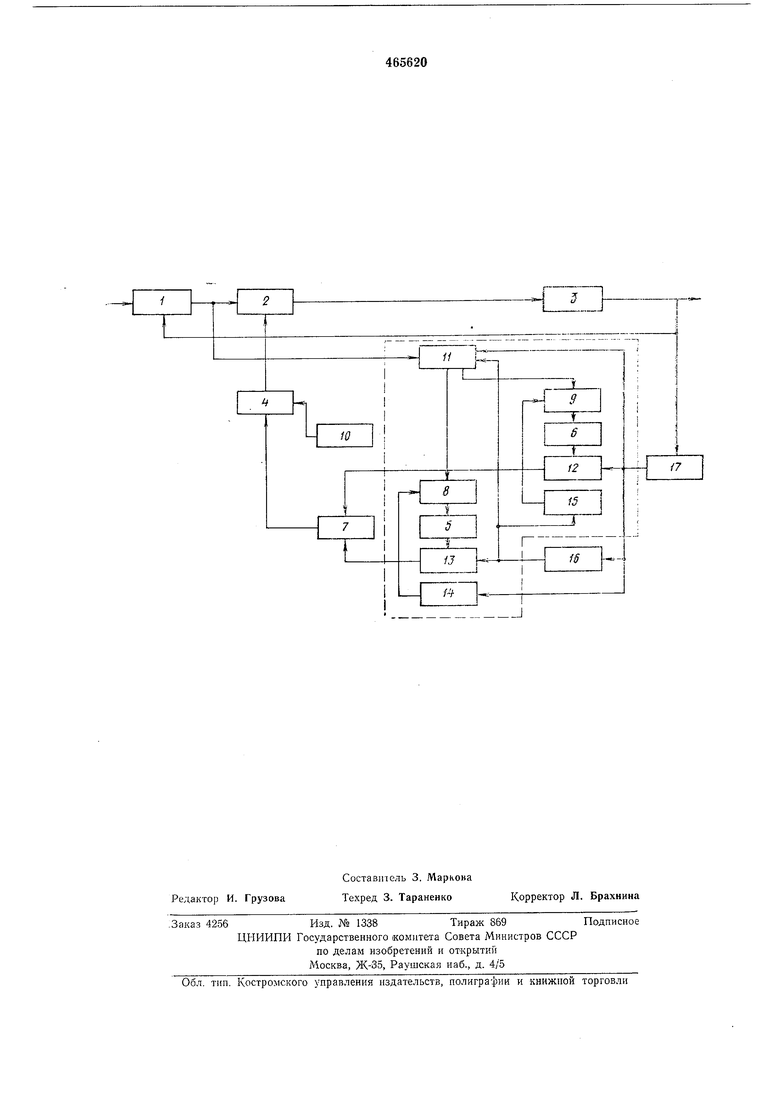
сигнал управления ey(/), который является суммой сигнала ошибки управления АЕ(О Ji корректирующего оитнала ei(/). Параметры устройства для автоматического управления в различных режимах и условиях работы изменяются, при этом корректирующий Сигнал ек{/) должен учитывать из1 1елеБие параметров устройства. Пусть задающее воздействие a(t) описывается гармоническим закшюм, тогда в момент, когда уокореиие движения выходного воздействия .равно нулю, скорость движения максимальна и определяется выражением: рмакс /(р.:еу, где рмакс - макси.мальная скорость движения выходiioro воздеиствия; /Ср - добротность устройства по CKqpo8у-сигнал управления. В момент, когда скорость движе|™1я выходного воздействия равна нулю, ускорение приобретает максимальное значение (pMai;c / Cp-ey, где , - максимальное ускорение выходного воздействия; Кр - добротность устройства по ускоревию;еу - сИЛнал управления. Пр.и -изменении параметров стройства /Ср и /Ср Соответственно изменяется и ошибка управлениЯ устройст1ва Де(/). Подст ройку корректирующего сигнала sit () можно проводить, измеряя в моменты времени, когда ускорение движения выходного воздействия p(f) .или старость |движения выходного воздействия Р(/) равиы нулю, соответствующие отиошеиия Де Де .-;ИЛИ г..И В случае изменения эна макср.-иакс чений ЭТИХ отношений осуществлять подстройку соответствующих коэффициентов передачи в корректирующем устройсше. Корректирующий сигнал с изменения параметров устройства формируется следующим образом. Сигнал с выхода исполнительного механизма 3 поступает иа тахогеиератор 17, где форМИруется сигнал, пропорциональный ощибке устройства -по скорости Р(0- Дифференциатор 16 формирует сигнал, пропорциональный ошибке устройства по ускорению р(0. Сформированные сигналы ири изменении (парамет:ров устройства iB моменты вр емени, когда ускорение или скорость выходного сигнала устройства равно нулю, дискретно изменяются за счет .изменения коэф.фициеитав передачи балансных .модуляторов 12 и 13. Коэффициенты передачи балансных модуляторов изменяются сформирова на1ыми .в делительном бло1се 11 сиг.налами, иропорциональ-ным-ц отношению сигнала ошибки устройства Ле(0 К с.игналу скорости р() и отпоиюнию сигнала ои Ибки Д8(/) к .сигналу ускорения р(0Так в момент, «огда , нуль-орган 15 открывает ключ 9, и ф.иксатор 6 запоминает сигнал, поступающий с выхода делительиого блоДека, пропорционального отношению Корректировка коэффициента передачи балансного модулятора 12 осуществляется снгналом с выхода фиксатора 6. Аналогично рассмотренному случаю, в мо.мент, когда , нуль-орган 14 открывает ключ 8, .фиксатор 5 запоминает сигнал, поступающий с выхода делительного .блока 11 и иропорцпоиальный отСигнал с выхода фиксатоиошен.ию -г,ра 5 корректирует коэффициеит балансного модулятора 13. Таким образом, при влиянии возмуи,а1ощего воздействия, что вызывает изменение коэффициентов передачи элементо(В устройства или статического момента объекта управления, уменьшается ошибка Де(0 путем подстройк.и коэф.фициентов передачи корректирующего устройства. Предмет изобретения Устройство для автоматического управления, содержащее фиксатор, входы которого подключены к сумматору и геиератору и.мпульсов, измеритель рассогласования, выход icoTOporo через усилитель «оединен ..с исполнительным механизмом, выход кото.рого связан с входом .измерителя рассогласования и с тахогенератором, соединенным с .дифференциатором, и второй фиксатор, отличающееся тем, что, с целью иовышения точности работы устройства при отклонеидп его параметров от номинальных, устройство содерлснт делительный блок, (ВХОДЫ которого соединены с выходом 1И.змерителя рассогласования и выходом тахогенератора, два ключа, два нуль-органа, выходы которых подключены к управляющему входу соответствующего ключа, третий фиксатор н два балансных модулятора, выхо.ды которых соединены с входами сумматора, при этом каждый из двух выходов дел.ительного блока через ключ и соответствующий фиксатор подключей к управляющему входу соответствующего балансного модулятора, вход первого нз которых связан с выходом тахогенератора, .выход .дифференциатора соединен с входами делительного -блока, первого нуль-органа и второго балансного .модул.ятора, а вход дифференциатора подключен к входу .второго нульоргана.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1975 |
|
SU550617A1 |
| Устройство автоматического управления | 1974 |
|
SU531130A1 |
| Следящая система | 1978 |
|
SU711538A1 |
| Система автоматического управления | 1974 |
|
SU556413A1 |
| Следящая система | 1975 |
|
SU742871A1 |
| Система управления | 1976 |
|
SU714350A1 |
| Следящая система | 1978 |
|
SU746405A1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |