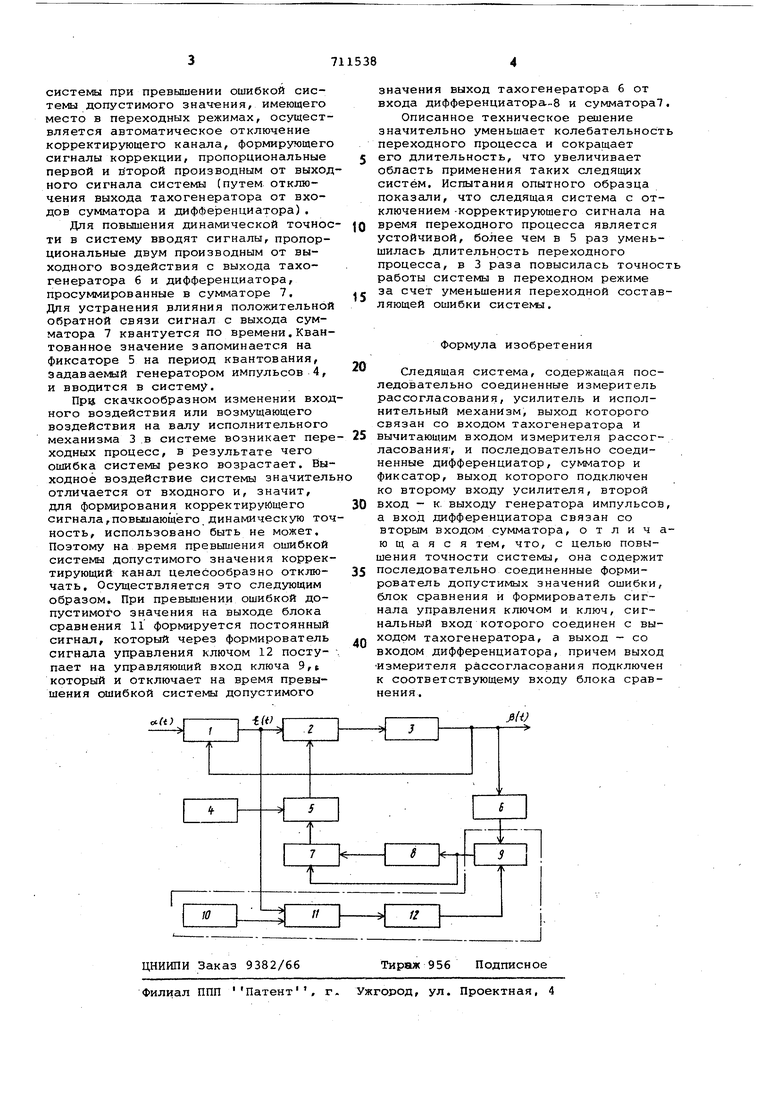
Изобретение относится к .области автоматики, а именно к автоматическому управлению, и может найти применение для построения высокоточных следящих систем широкого профил Известна следящая система,содержа жащая последовательно соединенные измеритель рассогласования, усилител и исполнительный механизм, выход которого соединен со входом измерите ля рассогласования и через последовательно соединенные тахогенератор, дифференциатор, сумматор, второй вход которого соединен с выходом тахогенератора, и фиксатор, второй вход которого соединен с выходом генератора импульсов, соединен с вторы входом усилителя. При работе следяще системы в установившемся динамическо режиме достигается высокая точность регулирования. Однако эта система обладает недостаточной эффективность при работе системы в переходных режимах, в которых при формировании корректируюшего сигнала сказывается отличие выходного сигнала системы от входного, которое в ряде случаев может быть значительным. Переходный процесс в таких системах является затянутым и колебательным; точность системы в переходном режиме, таким образом,является низкой. Целью изобретения -является повышение точности следящей системы при работе в переходных режимах. Это достигается тем, что система содержит последовательно соединенные формирователь допустимых значений ошибки, блок сравнения, формирователь сигнала управления ключом и ключ, сигнальный вход которого соединен с выходом тахогенератора, а выход - со входом дифференциатора, причем выход измерителя рассогласования подключен к соответствующему входу блока сравнения. На чертеже представлена структурная принципиальная схема следящей системы. Она содержит измеритель рассогласования 1, усилитель 2, исполнительный механизм 3, генератор импульсов 4, фиксатор 5, .тахогенератор 6, сумматор 7, дифференциатор 8, ключ 9, формирователь допустимого значения ошибки 10, блок сравнения 11 и формирователь сигнала управления (лючом 12. Во время работы следящей системы при превышении ошибкой системы допустимого знач-ения, имеющего место в переходных режимах, осуществляется автоматическое отключение корректирующего канала, формирующего сигналы коррекции, пропорциональные первой и Еторой производным от выход ного сигнала системы (путем отключения выхода тахогенератора от входов сумматора и диффе эенциатора) . Для повышения динамической точнос ти в систему вводят сигналы, пропорциональные двум производным от выходного воздействия с выхода тахогенератора 6 и дифференциатора, просуммированные в сумматоре 7. Для устранения влияния положительной обратной связи сигнал с выхода сумматора 7 квантуется по времени,Квантованное значение запоминается на фиксаторе 5 на период квантования, задаваемый генератором импульсов 4, и вводится в систему. ПРИ скачкообразном изменении вход ного воздействия или возмущающего воздействия на валу исполнительного механизма 3 в системе возникает пере ходных процесс, в результате чего ошибка системы резко возрастает. Вы ходное воздействие системы значител отличается от входного и, значит, для формирования корректирующего сигнала,повышающего динамическую то ность, использовано быть не может. Поэтому на время превышения ошибкой системы допустимого значения коррек тирующий канал целесообразно отключать. Осуществляется это следующим образом. При превышении ошибкой допустимого значения на выходе блока сравнения 11 формируется постоянный сигнсш, который через формирователь сигнала управления ключом 12 поступает на управляющий вход ключа 9,t который и отключает на время превышения ошибкой системы допустимого значения выход тахогенератора б от входа дифференциатора-8 и сумматора, Описанное техническое ретиение значительно уменьшает колебательность переходного процесса и сокращает его длительность, что увеличивает область применения таких следящих систем. Испытания опытного образца показали, что следящая система с отключением -корректирующего сигнала на время переходного процесса является устойчивой, более чем в 5 раз уменьшилась длительность переходного процесса, в 3 раза повысилась точность работы системы в переходном режиме за счет уменьшения переходной составляющей ошибки систе1 ы. Формула изобретения Следящая система, содержащая последо1вательно соединенные измеритель рассогласования, усилитель и исполнительный механизм, выход которого связан со входом тахогенератора и вычитающим входом измерителя рассогласования, и последовательно соединенные дифференциатор, сумматор и фиксатор, выход которого подключен ко второму входу усилителя, второй вход - к. выходу генератора импульсой, а вход дифференциатора связан со вторым входом сумматора, отличающаяся тем, что, с целью повышения точности системы, она содержит последовательно соединенные формирователь допустимых значений ошибки, блок сравнения и формирователь сигнала управления ключом и ключ, сигнальный вход которого соединен с выходом тахогенератора, а выход - со входом дифференциатора, причем выход измерителя рассогласования подключен к соответствующему входу блока сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1974 |
|
SU556413A1 |
| Следящая система | 1975 |
|
SU550617A1 |
| Система управления | 1976 |
|
SU714350A1 |
| Устройство для автоматического управления | 1973 |
|
SU465620A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Следящая система | 1977 |
|
SU661501A1 |
| Следящая система | 1978 |
|
SU746405A1 |
| Следящая система | 1977 |
|
SU732807A1 |
| Следящая система | 1987 |
|
SU1499315A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
