датчики угловых перемещений, тележки устанавливать на карданном шарнире, а для сохранения постоянства расстояния от поверхности макета до зеркала необходимо иметь исполнительный механизм для вертикальных перемещений телевизионной камеры с зеркалом.
Кроме того, для отработки упражнений вождения машины по пересеченной местности с различными характеристиками продольного и поперечного профиля необходимо иметь различные макеты.
Целью изобретения является упрощение конструкции имитатора визуальной обстановки тренажера, воспроизводящего движение колесной машины по пересеченной местности.
Достигается это тем, что предлагаемы: имитатор снабжен датчиками, учитывающими статистические данные продольного и поперечного кренов машины при ее движении по пересеченной местности, один из Которых, вырабатывающий сигнал, соответствующий продольному крену машины, соединен с исполнительным механизмом для поворота зеркала относительно кронштейна а другой - вырабатывающий сигнал, соответствующий поперечному крену машины, - с исполнительным механизмом для перемещения телевизионной камеры.
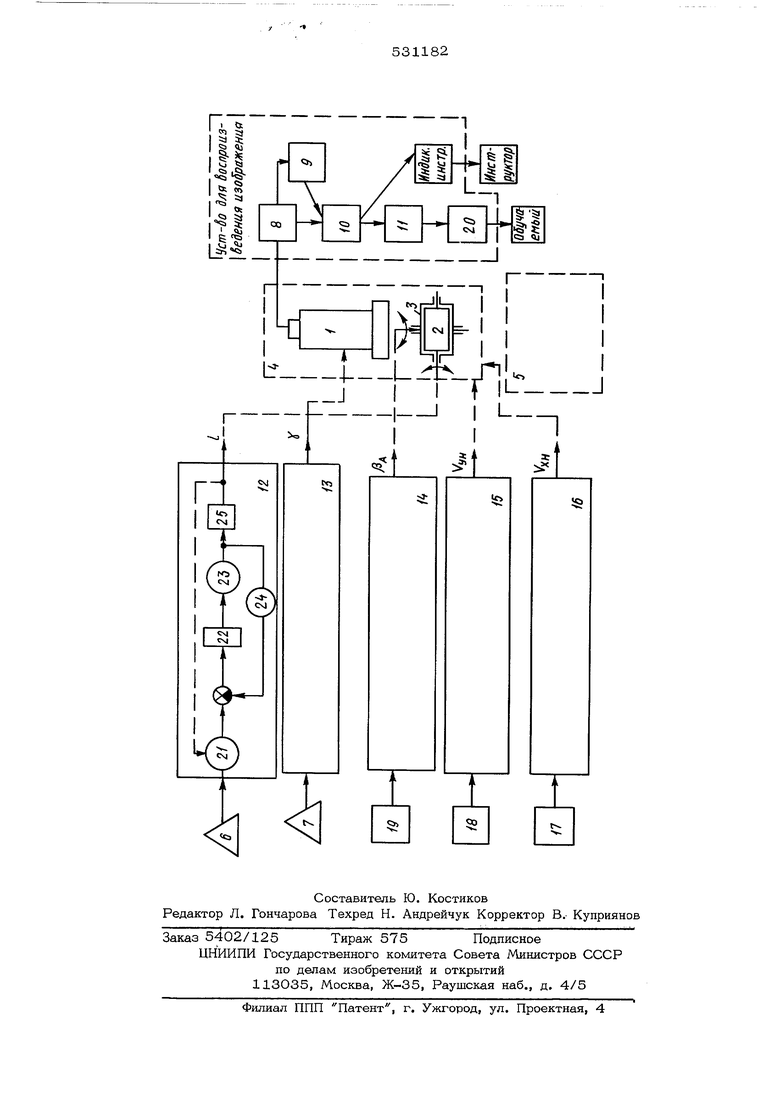
На чертеже изображена функциональная схема имитатора визуальной обстановки тренажера.
Имитатор содержит телевизионную камеру 1, зеркало 2 с кронштейном 3, координатор 4, макет местности 5, датчики 6 и 7, учитывающие статистические данные продольного и поперечного кренов машины, блок управления 8, приставка перестройки развертки 9, синхрогенератор 10, проектор 11, исполнительные механизмы 12-16, выходы имитатора динамики движения машины в тренажере 17, 18, 19 и экран 20.
Каждый исполнительный механизм состоит из сельсина 21 с обратной связью, усилителя 22, двигателя 23 с тахогенератором обратной связи 24 и редуктора 25.
Передающая телевизионная камера 1 с кронштейном 3 зеркала 2 прикреплены к координатору 4, перемещающемуся относительно макета местности 5. К кронштейну 3 на горизонтальной оси прикреплено зеркало 2.
Датчики 6, 7 соединены соответственно с исполнительными механизмами 12, 13. Датчики 6, 7 стандартного типа учитывают статистические данные продольного и поперечного кренов машины при ее
движении по пересеченной местности опре деленного района.
Изменяя используемые в датчиках 6, 7
статистические данные по продольным и поперечным кренам машины можно моделировать ее движение по пересеченной местности любого профиля.
Исполнительные механизмы 14, 15,16
связаны соответственно с выходами имитатора динамики движения машины в тренажере 19, 18, 17.
Имитатор работает следующим образом.
Исполнительные механизмы 14, 15, 16 управляемые напряжениями с выходов имитатора динамики движения машины в тренажере, соответствующими углу поворота Зд координатора 4 относительно вертикальной оси, продольной V и поперечной V скоростям движения координатора 4 обеспечивают перемещения телевизионной передающей камеры 1 с кронштейном 3 и зеркалом 2. Датчик 6 вырабатывает сигнал,
соответствующий углу продольного крена 1 , который подается к исполнительному механизму 12, обеспечивающему поворот зеркала 2 относительно оси кронштейна 3 на угол, равный половине угла продольного крена машины. Датчик 7 вьфабатывает сигнал, соответствующий углу поперечного крена I, который подается к исполнительному механизму 13, обеспечивающему перемещение телевизионной передающей камеры
1 относительно продольной оси движения на угол, равный углу крена машины j , При этом формируемое с помощью блока управления 8, приставки перестройки развертки 9, синхрогенератора 10 и проекто-
ра 11 изображение проектируется на экран 20, создавая иллюзию движения колесг ной машины по пересеченной местности.
Предлагаемый имитатор позволяет существенно упростить конструкцию и эксплуатацию тренажера, значительно умень- ч лить стоимость и расширить возможности эго применения.
Формула изобретения
SO
Имитатор визуальной обстановки тренажера для обучения управлению колесной транспортной машиной, содержащий передающую телевизионную камеру с закрепленным на ней с помощью кронштейна зер-. калом и исполнительные механизмы для продольных и поперечных перемещений телевизионной камеры и поворота зеркала, отличающийся тем, что, с
60 целью упрощения конструкции имитатора.
он снабжен датчиками, учитьшающими статистические данные продольного и попереч ного кренов машины при ее движении по ; пересеченной местности, один из которых, вырабатывающий сигнал, соответствующий продольному крену машины, соединен с ис-+ полнительным механизмом для поворота зеркала относительно кронштейна, а другой, вырабатывающий сигнал, соответствующий поперечному крену машины - с исполнительным механизмом для перемещения телевизионной камеры.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство № 500538 от 09.75, кл. G 09 В 9/04.
2.Патент США № 3516715 по кл. 303-21 от 1970 г.
3.Отчет по теме Разработка комплекса аппаратуры для изучения деятельности
водителя в дорожных условиях. Московский автодорожный институт Москва, 1968г.
П.
. ct I 5 I 1 I 1
I til
5
I к «
LJ:E.

| название | год | авторы | номер документа |
|---|---|---|---|
| Телевизионный имитатор визуальной обстановки тренажера для обучения управлению колесной транспортной машиной | 1972 |
|
SU500538A1 |
| Устройство имитации условий движения транспортного средства для тренажера | 1990 |
|
SU1798810A2 |
| Устройство имитации условий движения транспортного средства для тренажера | 1984 |
|
SU1401503A1 |
| Тренажер транспортного средства | 1981 |
|
SU1054829A1 |
| Устройство для имитации визуальной обстановки в тренажере транспортного средства | 1984 |
|
SU1218416A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| Тренажер транспортного средства | 1983 |
|
SU1141442A1 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР | 1989 |
|
RU1723915C |
| Имитатор визуальной обстановки авиационного тренажера | 1977 |
|
SU643956A1 |
| ИМИТАТОР ВИЗУАЛЬНОЙ ОБСТАНОВКИ ДЛЯ ТРЕНАЖЕРА ЛЕТАТЕЛЬНОГО АППАРАТА | 1987 |
|
SU1515941A1 |