Date : 31/07/2001
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации крена самолета | 1973 |
|
SU531332A1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2042170C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2466907C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335009C1 |
| АВТОПИЛОТ ДЛЯ СИММЕТРИЧНОЙ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2302358C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335006C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |

УСТРОЙСТВО ДЛЯУСТАНОВКИ
Number of pages : 4
Previous document : SU 531326A
Next document : SU 531358
союз СОВЕТСКИХ
СОЦИАЛИСТИЧЕСКИХ
РЕСПУБЛИК
SU,,., 531332 А1
(J9)
ГОСУДАРСТВЕННОЕ ПАТЕНТНОЕ ВЕДОМСТВО СССР (ГОСПАТЕНТ СССР)
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
1
(21)1939133/23
(22)04.07.73 (46)23.05.93. Б юл. №19
(71)Казанский авиационный институт
(72)В.Б.Живетин
(56) Боднер В.А., Козлов М.С. Стабилизация летательных аппаратов и автопилоты, Оборонгиз. 1961, с. 60.
(54X57) УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ КРЕНА САМОЛЕТА, содержащее последовательно соединенные усилитель, сумматор, рулевую машину и элероны, выИзобретение может быть применено для стабилизации креновых движений крылатых летательных аппаратов, например самолетов.
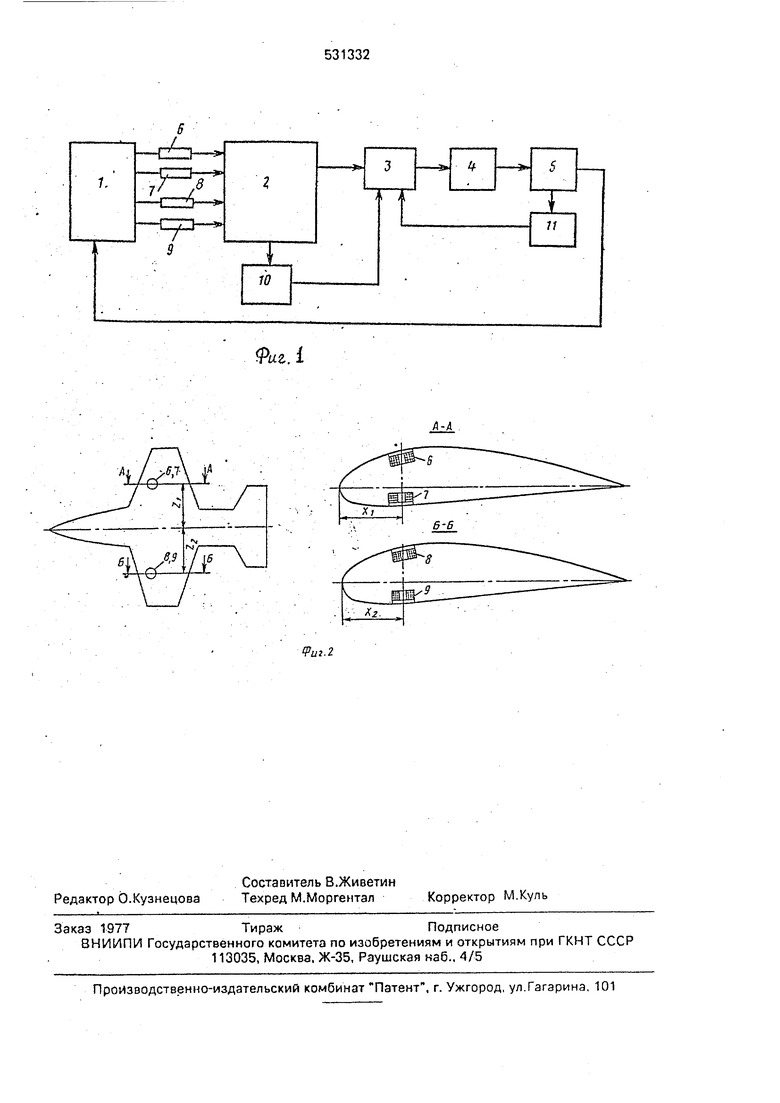
На фиг.1 изображена функциональная схема предлагаемого устройства; на фиг.2 расположение датчиков давления.
Устройство для стабилизации крена самолета 1 содержит усилитель 2, сумматор 3, рулевую машину 4, элероны 5, датчики давления 6 и 7, установленные на правом крыле, датчики давления 8 и 9, установленные на левом крыле, интегратор 10, блок 11 обратной связи.
Устройство работает следующим образом. Алгебраическая сумма избыточных давлений, измеренных, например, датчиками давления 6 и 7, определяет перепад давления в месте установки датчиков
(Рн - P8)qS PqS
где РН и РВ - коэффициенты избыточного давления на нижней и верхней поверхностях :рыла;
. Р - коэффициент перепада давления;
q - скоростной напор;
S - площадь мембраны.
ход которых подключен к входу блока обратной связи, выход которого подключен к второму входу сумматора, отличанзщееся тем, что, с целью улучшения динамических характеристик устройства, в него введен интегратор, вход которого подключен к выходу усилителя, а выход- к второму входу сумматора, и установленные по разные стороны хорды каждого крыла датчики давления, отстоящие на равные расстояния от продольной оси самолета, выходы которых соединены со входами усилителя.
Как известно величины Рн, Рв и Р зависит от угла атаки, определяемой суммой внешнего возмущения и собственного, измеренного между вектором скорости и продольной осью. В линейной зоне справедливо соотношение: Р Аа:+В где а а п + (2 wi
А и В - коэффициенты пропорциональности;
а п - угол атаки между вектором путевой скорости и продольной осью самолета;
а VI - приращение угла атаки, обусловленное турбулентными потоками воздуха.
Приращение давления на левой и правой полуплоскости будет включать как собственное возмущенное движение летательного аппарата, так и возмущения, т.е.
ДР- Да п+ «WB
Этот сигнал поступает с усилителя 2 на вход сумматора 3 и далее на вход рулевой машины 4 и элеронов 5, которые, воздействуя на летательный аппарат 1, возвращают его в стабилизированное положение.
9u.i
i f
