Изобретение относится к области авиационной техники, а именно к системам дистанционного управления (СДУ) самолетом в боковом движении.
Классическое управление самолетом в боковом движении осуществляется двумя органами: по крену - элеронами и дифференциально отклоняемыми поверхностями стабилизатора (через поперечное перемещение ручки управления), по рысканию - рулем направления (через педали). Реакция самолета при раздельном отклонении элеронов или руля направления обычно не сводится к вращению относительно соответствующей главной оси инерции, а представляет собой существенно взаимосвязанное одновременное движение по крену и рысканию (Бюшгенс Г.С., Студнев Р.В. Аэродинамика самолета: Динамика продольного и бокового движения. - М.: Машиностроение, 1979, 352 с., с. 200-201). Воздействие на канал крена путем отклонения элеронов вызывает отклонение самолета и по оси рыскания, и наоборот, воздействие на канал рыскания путем отклонения руля направления вызывает и движение в канале крена (Рудис В.А. Полуавтоматическое управление самолетом. - М.: Машиностроение, 1978, 152 с., с. 9). Для летчика наиболее удобна ситуация, когда перемещение ручки управления самолетом (РУС) управляет креном, а педали создают боковую силу и «прямую» реакцию крена на «дачу ноги» (Рудис В.А. Полуавтоматическое управление самолетом. - М.: Машиностроение, 1978, 152 с., с. 11). Аэродинамические компоновки современных самолетов не обеспечивают подобного раздельного управления, поэтому в авиационной практике широко применяются системы улучшения управляемости (СУУ). Комплекс «самолет - СУУ» в боковом движении должен обеспечивать (Бюшгенс Г.С., Студнев Р.В. Аэродинамика самолета: Динамика продольного и бокового движения. - М.: Машиностроение, 1979, 352 с., с. 308):
- постоянную времени процессов отработки угла крена не более 1с;
- малое взаимодействие движений крен-рыскание, в т.ч. малые углы скольжения β при поперечном управлении;
- требуемый градиент перемещения ручки управления по угловой скорости крена 
- частоту боковых колебаний по углу скольжения β в пределах ωβ>1, а на режимах энергичного управления по крену ωβ>1,3 ωXmax;
- достаточную эффективность управления при балансировке самолета;
- удовлетворительные характеристики спирального движения.
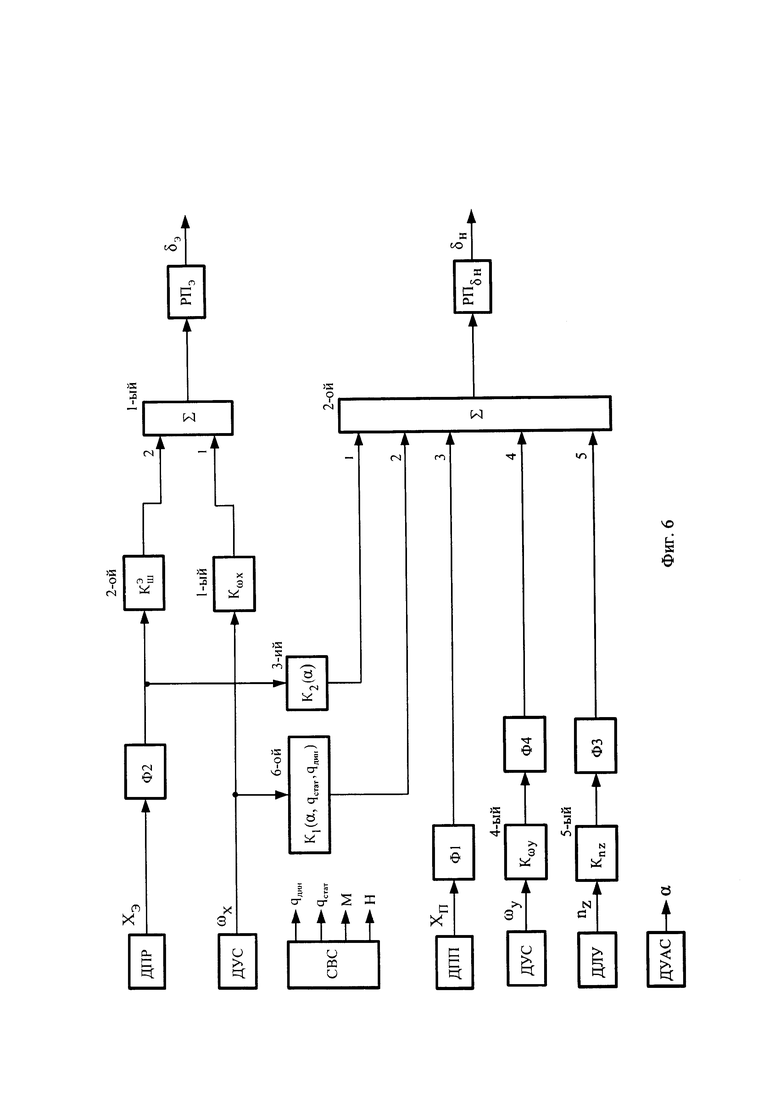
Примером подобных систем являются структуры СУУ, рассмотренные в работе: Рудис В.А. Полуавтоматическое управление самолетом. - М.: Машиностроение, 1978, 152 с., рис. 3.1 и рис. 3.2. Наиболее близким аналогом по отношению к заявляемой СДУ самолетом в боковом движении служит СУУ, представленная в работе: Бюшгенс Г.С., Студнев Р.В. Аэродинамика самолета: Динамика продольного и бокового движения. - М.: Машиностроение, 1979, 352 с., с. 308, рис. 36.1.
Данная система управления содержит датчик положения ручки (ДПР) управления самолетом по крену, датчик угловой скорости (ДУС) крена ωX, систему воздушных сигналов (СВС), формирующую сигналы динамического и статического скоростного напора, числа М и высоты полета Н, первый, второй и третий фильтры подавления помех, форсирующий фильтр, датчик положения педалей (ДПП), выход которого соединен с входом первого фильтра подавления помех, ДУС рыскания ωу, датчик линейных ускорений (ДЛУ) в боковой плоскости, датчик углов атаки и скольжения (ДУАС), первый, второй, третий, четвертый, пятый и шестой масштабирующие блоки, рулевой привод элеронов, рулевой привод руля направления, первый сумматор, первый вход которого соединен с выходом первого масштабирующего блока и выход которого подключен к входу рулевого привода элеронов, второй сумматор, выход которого соединен с входом рулевого привода руля направления, вход второго фильтра подавления помех соединен с выходом ДПР. Дополнительно вход шестого масштабирующего блока соединен с выходом ДУС крена ωХ, выход второго фильтра подавления помех через второй масштабирующий блок соединен с вторым входом первого сумматора, вход первого масштабирующего блока подключен к выходу ДУС крена ωХ, входы второго сумматора соединены соответственно с выходом второго фильтра подавления помех через третий масштабирующий блок; с выходом шестого масштабирующего блока; с выходом первого фильтра подавления помех; с выходом ДУС рыскания ωy через последовательно соединенные четвертый масштабирующий блок и форсирующий фильтр; с выходом ДЛУ через последовательно соединенные пятый масштабирующий блок и третий фильтр подавления помех. Кроме того, передаточные числа первого, второго, четвертого и пятого масштабирующих блоков корректируются по величине по сигналам с выходов СВС, а передаточные числа третьего и шестого масштабирующих блоков, кроме того - по сигналу угла атаки самолета с выхода ДУАС. Функциональное назначение всех блоков и работа рассмотренной СУУ подробно изложены в работе: Бюшгенс Г.С., Студнев Р.В. Аэродинамика самолета: Динамика продольного и бокового движения. - М.: Машиностроение, 1979, 352 с., с. 309. Заметим только, что рулевая машина и бустер (рис. 36.1) совмещены в современных рулевых приводах в единое устройство.
Рассмотренная СУУ позволяет удовлетворить большинству из перечисленных выше требований по управляемости самолета в боковом движении. Вместе с тем, ей присущи следующие недостатки:
- необходимость активного участия летчика в процессах балансировки самолета одновременно по двум каналам управления - в канале крена и в канале рыскания;
- трудности в обеспечении желаемых значений критерия управляемости в боковом движении  при даче педалями (Бюшгенс Г.С., Студнев Р.В. Аэроди.намика самолета: Динамика продольного и бокового движения. - М.: Машиностроение, 1979, 352 с.,. с. 231), обусловленные как априорно приближенным знанием фактических аэродинамических характеристик самолета, так и значительным их изменением по режимам полета;
при даче педалями (Бюшгенс Г.С., Студнев Р.В. Аэроди.намика самолета: Динамика продольного и бокового движения. - М.: Машиностроение, 1979, 352 с.,. с. 231), обусловленные как априорно приближенным знанием фактических аэродинамических характеристик самолета, так и значительным их изменением по режимам полета;
- затруднения в подавлении обратной реакции по крену на больших углах атаки;
- не предусмотрено предотвращение выхода современных рулевых приводов на ограничения по скорости при резких дачах РУС и педалей;
- трудности при стабилизации заданного крена в ручном управлении, вызванные уходом крена от достигнутого значения после возвращения РУС в балансировочное положение - т.н. эффект спирального движения (Бюшгенс Г.С., Студнев Р.В. Аэродинамика самолета: Динамика продольного и бокового движения. - М.: Машиностроение, 1979, 352 с., с. 223, 224).
Техническим результатом, достигаемым в заявляемой системе дистанционного управления самолетом, является улучшение характеристик управляемости в боковом движении, а именно:
1. Обеспечение автоматической балансировки самолета в канале крена и облегчение за счет этого выполнения балансировки летчиком в ручном режиме только в одном канале - в канале рыскания.
2. Обеспечение желаемого значения критерия управляемости в боковом движении  при даче педалями.
при даче педалями.
3. Облегчение решения задачи предотвращения обратной реакции по крену на больших углах атаки.
4. Упрощение режима стабилизации летчиком заданного крена за счет того, что поведение самолета в канале крена ближе к нейтрально устойчивому.
5. Обеспечение работы рулевых приводов в линейной зоне изменения скоростных характеристик.
Технический результат достигается тем, что система дистанционного управления самолетом в боковом движении содержит датчик положения ручки (ДПР) управления самолетом по крену, датчик угловой скорости (ДУС) крена ωХ, систему воздушных сигналов (СВС), формирующую сигналы динамического и статического скоростного напора, числа М и высоты полета Н, первый, второй и третий фильтры подавления помех, форсирующий фильтр, датчик положения педалей (ДПП), выход которого соединен с входом первого фильтра подавления помех, ДУС рыскания ωу, датчик линейных ускорений (ДЛУ) в боковой плоскости, датчик углов атаки и скольжения (ДУАС), первый, второй, третий, четвертый, пятый и шестой масштабирующие блоки, рулевой привод элеронов, рулевой привод руля направления, первый сумматор, первый вход которого соединен с выходом первого масштабирующего блока и выход которого подключен к входу рулевого привода элеронов, второй сумматор, выход которого соединен с входом рулевого привода руля направления, вход второго фильтра подавления помех соединен с выходом ДПР. Дополнительно СДУ содержит первый нелинейный блок, выход которого подключен к входу второго масштабирующего блока, а вход - к выходу второго фильтра подавления помех, первый предварительный фильтр (префильтр), вход которого соединен с выходом второго масштабирующего блока, а выход - со вторым входом первого сумматора, четвертый фильтр подавления помех, вход которого подключен к выходу ДУС крена ωХ, а выход - к входу первого масштабирующего блока, второй нелинейный блок, второй префильтр, последовательно соединенные низкочастотный фильтр, третий нелинейный блок, седьмой масштабирующий блок, третий и четвертый сумматоры на два входа каждый, восьмой масштабирующий блок и интегратор, девятый масштабирующий блок, вход которого подключен к выходу первого нелинейного блока, а выход - к второму входу третьего сумматора, пятый фильтр подавления помех, вход которого соединен с выходом ДУС рыскания ωy, а выход - с входом форсирующего фильтра, последовательно соединенные шестой фильтр подавления помех, десятый масштабирующий блок и ключ, коммутируемый по сигналу qдин с выхода СВС, седьмой фильтр подавления помех, вход которого соединен с выходом третьего масштабирующего блока, одиннадцатый масштабирующий блок, при этом первый сумматор снабжен третьим входом а второй сумматор - дополнительным входом, вход третьего масштабирующего блока подключен к выходу ДПР, выход второго нелинейного блока через шестой масштабирующий блок - к входу второго префильтра, второй вход четвертого сумматора - к выходу четвертого фильтра подавления помех, выход интегратора - к третьему входу первого сумматора и к входу одиннадцатого масштабирующего блока, выход первого фильтра подавления помех - к входам низкочастотного фильтра и второго нелинейного блока, выход форсирующего фильтра - к входу четвертого масштабирующего блока, вход и выход третьего фильтра подавления помех - соответственно к выходу ДЛУ и к входу пятого масштабирующего блока, выход ДУАС по сигналу β - к входу шестого фильтра подавления помех, а выходы седьмого фильтра подавления помех, одиннадцатого масштабирующего блока, второго префильтра, четвертого и пятого масштабирующих блоков и ключа соединены с входами второго сумматора.
Сущность изобретения поясняется следующими графическими изображениями:
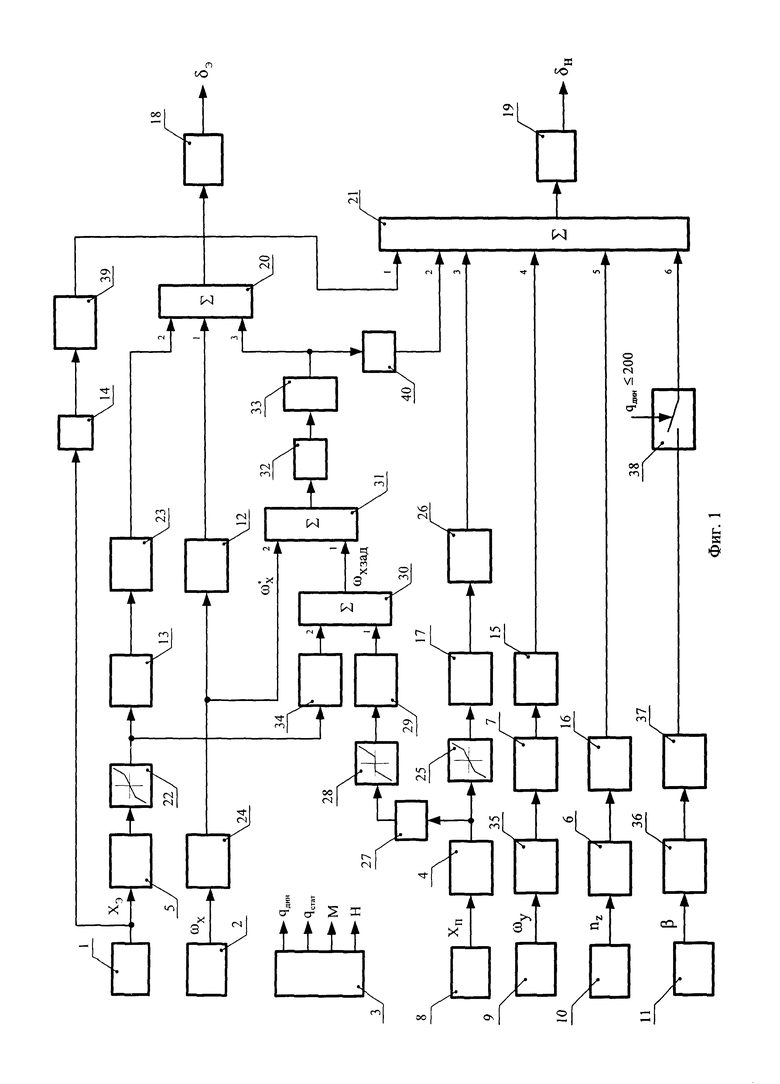
на фиг. 1 изображена система дистанционного управления самолетом в боковом движении;
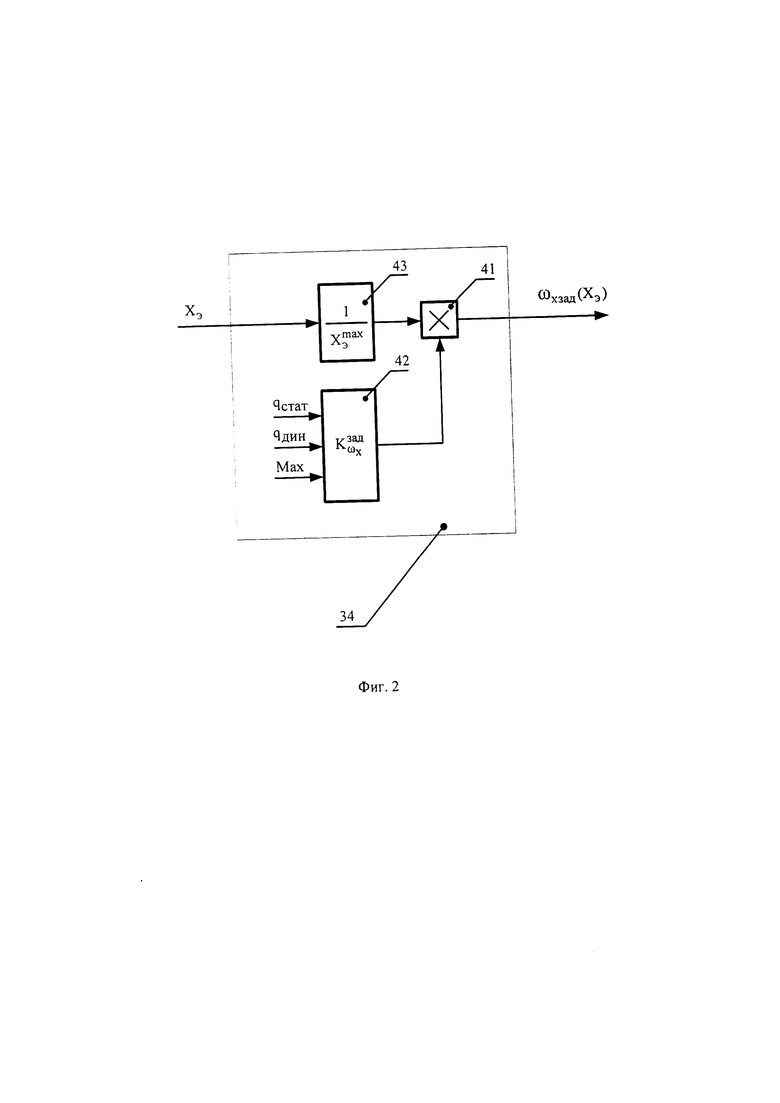
на фиг. 2 приведена структура девятого масштабирующего блока;
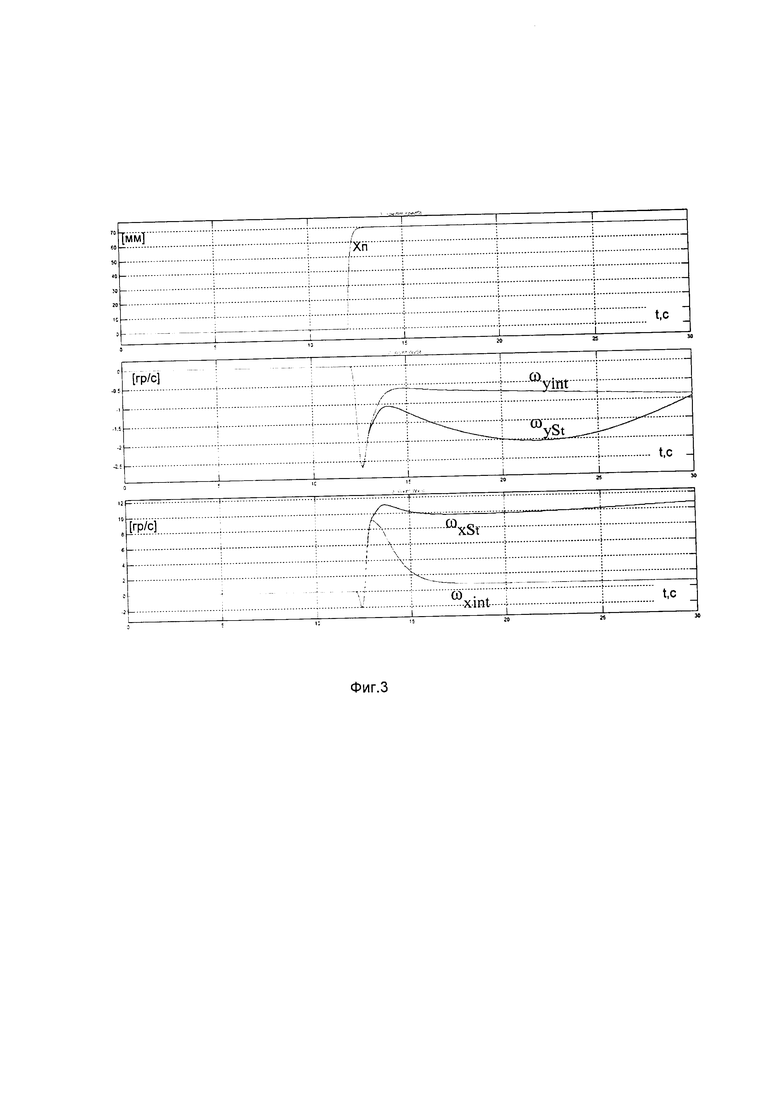
на фиг. 3 показаны графики изменения угловых скоростей крена и рыскания самолета при даче педалей с использованием астатического (интегрального) контура управления и без него (прототип);
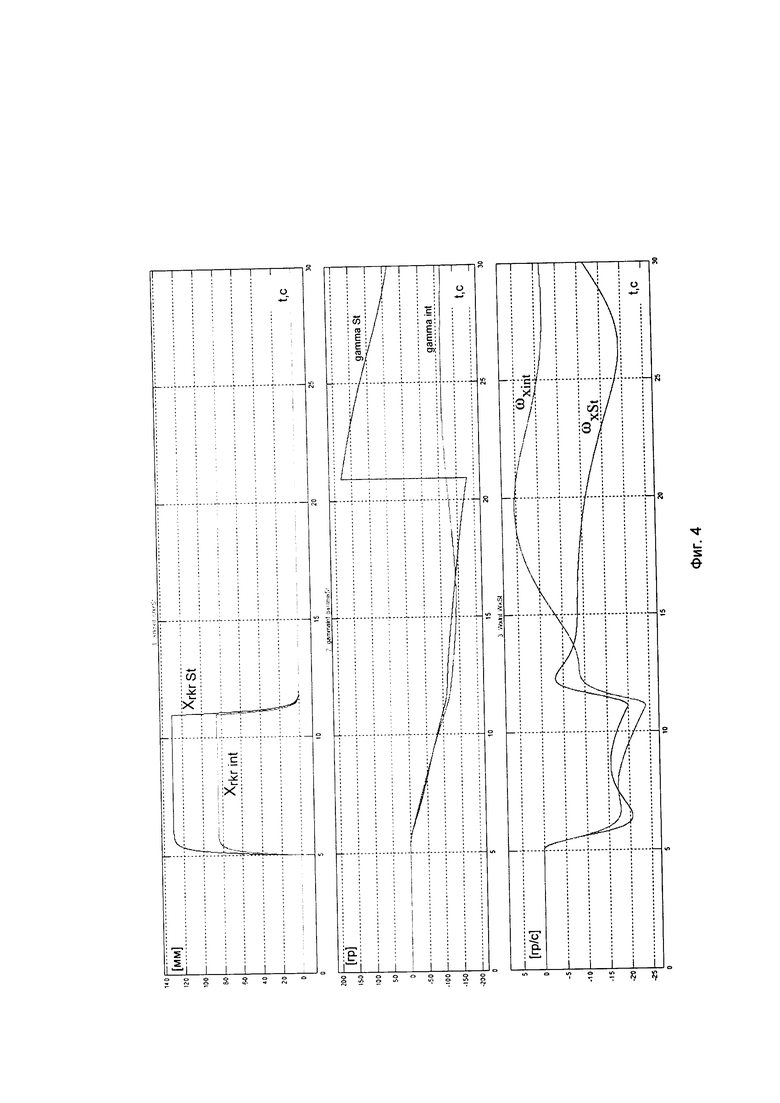
на фиг. 4 приведены графики изменения крена и угловой скорости крена при даче и возврате РУС в нейтральное положение с использованием астатического (интегрального) контура управления и без него (прототип);
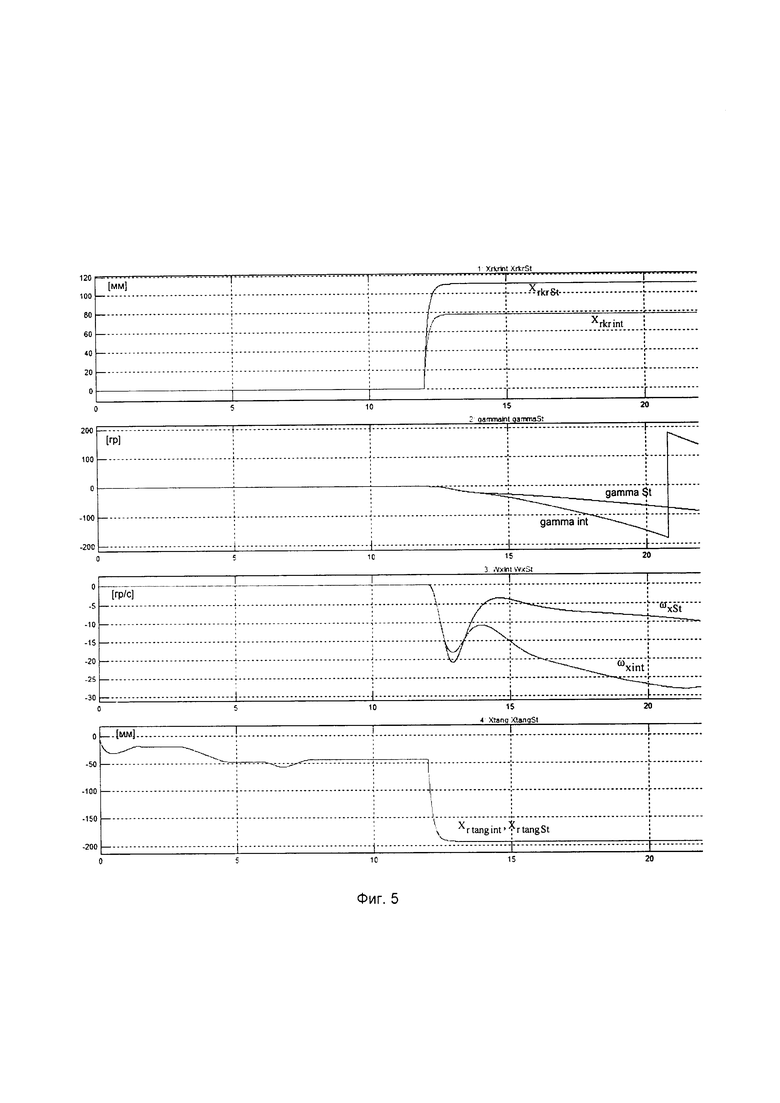
на фиг. 5 показаны графики изменения угловых скоростей крена и рыскания, углов крена и угла атаки при одновременном отклонении ручки управления по крену и тангажу с использованием астатического (интегрального) контура управления и без него (прототип);
на фиг. 6 представлена СУУ самолетом в боковом канале (прототип).
На фиг. 1-6 использованы следующие обозначения:
1 - датчик положения РУС по крену;
2 - датчик угловой скорости крена;
3 - система воздушных сигналов;
4, 5, 6 - первый, второй и третий фильтры подавления помех;
7 - форсирующий фильтр;
8 - датчик положения педалей;
9 - датчик угловой скорости рыскания;
10 - датчик линейных ускорений в боковой плоскости движения самолета;
11 - датчик углов атаки и скольжения;
12, 13, 14, 15, 16, 17 - соответственно первый, второй, третий, четвертый, пятый и шестой масштабирующие блоки;
18 - рулевой привод элеронов (РПЭ);
19 - рулевой привод руля направления (РПδн);
20, 21 - первый и второй сумматоры;
22 - первый нелинейный блок;
23 - первый предварительный фильтр (префильтр);
24 - четвертый фильтр подавления помех;
25 - второй нелинейный блок;
26 - второй предварительный фильтр (префильтр);
27 -низкочастотный фильтр;
28 - третий нелинейный блок;
29 - седьмой масштабирующий блок;
30, 31 - третий и четвертый сумматоры;
32 - восьмой масштабирующий блок;
33 - интегратор;
34 - девятый масштабирующий блок;
35, 36 - пятый и шестой фильтры подавления помех;
37 - десятый масштабирующий блок;
38 - ключ;
39 - седьмой фильтр подавления помех;
40 - одиннадцатый масштабирующий блок;
41 - блок перемножения;
42 - блок формирования заданной угловой скорости крена ωх зад;
43 - блок коррекции заданной угловой скорости крена ωх зад;
Хэ - сигнал с выхода датчика перемещения РУС;
ωх - сигнал угловой скорости крена;
qдин, qстат, М, Н - сигналы динамического и статического скоростного напора, числа Маха и высоты полета с соответствующих выходов СВС;
Хп - сигнал перемещения педалей;
ωУ - сигнал угловой скорости рыскания;
nz - сигнал перегрузки в боковом канале;
β - сигнал угла скольжения;
α - сигнал угла атаки;
δэ - угол отклонения элеронов;
δн - угол отклонения руля направления;
 - численное значение масштабирующего коэффициента, формирующего заданное значение угловой скорости крена от ручки управления креном;
- численное значение масштабирующего коэффициента, формирующего заданное значение угловой скорости крена от ручки управления креном;
 - максимальное значение перемещения РУС по крену;
- максимальное значение перемещения РУС по крену;
ωхзад(Хэ) - заданное значение угловой скорости крена от ручки управления креном;
Xrkr int - перемещение ручки управления креном с интегральным (астатическим) контуром управления;
Xrkr St - перемещение ручки управления креном с статическим контуром управления;
Xr tang int, Xr tang St - перемещение ручки управления тангажом соответственно с интегральным и статическим контурами управления;
gamma St- изменение угла крена с статическим контуром управления;
gamma int - изменение угла крена с интегральным (астатическим) контуром управления;
ωxSt, ωxint - изменения угловой скорости крена соответственно с статическим и с интегральным (астатическим) контурами управления;
ωySt, ωyint - изменения угловой скорости рыскания соответственно с статическим и с интегральным (астатическим) контурами управления.
Система дистанционного управления самолетом в боковом движении (фиг. 1) содержит датчик 1 положения ручки управления самолетом по крену, ДУС 2 крена ωх, систему 3 воздушных сигналов, первый 4, второй 5 и третий 6 фильтры подавления помех, форсирующий фильтр 7, датчик 8 положения педалей, выход которого соединен с входом первого фильтра подавления помех 4, ДУС 9 рыскания ωу, датчик 10 линейных ускорений в боковой плоскости, выход которого соединен с входом третьего фильтра подавления помех 6, первый 12, второй 13, третий 14, и четвертый 15 масштабирующие блоки, пятый 16 масштабирующий блок, вход которого соединен с выходом третьего фильтра подавления помех 6, шестой 17 масштабирующий блок, рулевой привод элеронов 18, рулевой привод руля направления 19, первый сумматор 20, первый вход которого соединен с выходом первого масштабирующего блока 12 и выход которого подключен к входу рулевого привода элеронов 18, второй сумматор 21, выход которого соединен с входом рулевого привода руля направления 19, первый нелинейный блок 22, выход которого подключен к входу второго масштабирующего блока 13, а вход - к выходу второго фильтра 5, первый предварительный фильтр (префильтр) 23, вход которого соединен с выходом второго масштабирующего блока 13, а выход - с вторым входом первого сумматора 20, четвертый фильтр подавления помех 24, вход которого подключен к выходу ДУС 2 крена ωх, а выход - к входу первого масштабирующего блока 12, второй нелинейный блок 25, вход которого соединен с выходом первого фильтра подавления помех 4, а выход - с входом шестого масштабирующего блока 17, второй префильтр 26, вход которого подключен к выходу шестого масштабирующего блока 17, последовательно соединенные низкочастотный фильтр 27, третий нелинейный блок 28, седьмой масштабирующий блок 29, третий 30, четвертый 31 сумматоры, восьмой масштабирующий блок 32 и интегратор 33, девятый масштабирующий блок 34, вход которого подключен к выходу первого нелинейного блока 22, а выход - к второму входу третьего сумматора 30, пятый фильтр 35 подавления помех, вход которого соединен с выходом ДУС 9 рыскания ωу, а выход - с входом форсирующего фильтра 7, последовательно соединенные шестой фильтр 36 подавления помех, десятый масштабирующий блок 37 и ключ 38, коммутируемый по сигналу qдин с выхода СВС 3, седьмой фильтр подавления помех 39, вход которого соединен с выходом третьего масштабирующего блока 14, а выход - с первым входом второго сумматора 21, одиннадцатый масштабирующий блок 40, вход которого подключен к выходу интегратора 33, а выход - к второму входу второго сумматора 21, при этом выход датчика 1 положения РУС подключен к входу третьего масштабирующего блока 14 и к входу второго фильтра подавления помех 5, выход ДУАС 11 соединен с входом шестого фильтра 36, выход четвертого фильтра подавления помех 24 соединен с вторым входом четвертого сумматора 31, вход низкочастотного фильтра 27 подключен к выходу первого фильтра подавления помех 4, выход интегратора 33 подключен к третьему входу первого сумматора 20, а выходы второго префильтра 26, четвертого 15 и пятого 16 масштабирующих блоков и ключа 38 соединены соответственно с третьим, четвертым, пятым и шестым входами второго сумматора 21.
Передаточные числа всех масштабирующих блоков 12, 13, 14, 15, 16, 17, 29, 32, 34, 37, 40 корректируются по режимам полета по комбинациям сигналов qдин, qстат, М, Н, формируемых на выходе СВС 3, и сигнала угла атаки а с выхода ДУАС 11. Конкретный вид коррекций определяется аэродинамическими характеристиками того или иного самолета. Блок 28 представляет собой зону нечувствительности, величина которой определяется максимально возможными сигналами ДПП 8, необходимыми для балансировки конкретного самолета. Характеристики нелинейных блоков 22 и 25 формируются с учетом фактических аэродинамических характеристик конкретного самолета и определяются потребными градиентами перемещения РУС и педалей по угловым скоростям крена и рыскания.
Структура масштабирующего блока 34 представлена на фиг. 2. Она включает в себя блок перемножения 41, блок 42 формирования заданной угловой скорости крена ωх зад и блок 43 коррекции ωх зад в зависимости от сигнала Хэ. Сигнал на выходе масштабирующего блока 34 определяется в виде
и достигает максимального значения при полном отклонении РУС, когда 
Форсирующий фильтр 7 с передаточной функцией  служит для улучшения динамических характеристик управляемости в канале рыскания. Постоянная времени Т этого фильтра корректируется по сигналам qдин, qстат, формируемым СВС 3. Конкретный вид коррекции определяется аэродинамическими характеристиками того или иного самолета.
служит для улучшения динамических характеристик управляемости в канале рыскания. Постоянная времени Т этого фильтра корректируется по сигналам qдин, qстат, формируемым СВС 3. Конкретный вид коррекции определяется аэродинамическими характеристиками того или иного самолета.
Низкочастотный фильтр 27 предназначен для улучшения динамических характеристик управляемости самолета по крену и рысканию. Передаточная функция этого фильтра представляет собой апериодическое звено, постоянная времени которого назначается исходя из конкретных аэродинамических характеристик самолета.
Рулевые приводы 18, 19 являются стандартными составными частями конкретного самолета. Префильтры 23, 26 представляют собой апериодические звенья с регулируемой постоянной времени и ограничением по величине скорости изменения выходного сигнала. Конкретные параметры префильтров определяются типом используемых рулевых приводов.
Основными отличительными особенностями заявляемой системы дистанционного управления самолетом в боковом движении являются, во-первых, применение астатического (интегрального) контура отработки заданной угловой скорости крена с использованием интегратора 33 и, во-вторых, участие интегратора 33 в формировании сигнала управления одновременно и на элероны, и на руль направления. На вход интегратора 33 с выхода сумматора 31 через масштабирующий блок 32 поступает сигнал разности между заданной угловой скоростью крена ωхзад и текущим значением угловой скорости крена  , очищенной от помех фильтром 24 подавления помех. Сигнал с выхода интегратора 33 управляет одновременно двумя рулевыми поверхностями самолета - через сумматор 20 элеронами и через масштабирующий блок 40 и сумматор 21 - рулем направления. При этом заданное значение угловой скорости крена ωхзад формируется как от РУС (по цепи ДПР 1→фильтр 5→нелинейный блок 22→масштабирующий блок 34→сумматор 30), так и от педалей (по цепи ДПП 8→фильтр 4→фильтр 27→нелинейный блок 28→масштабирующий блок 29→сумматор 30).
, очищенной от помех фильтром 24 подавления помех. Сигнал с выхода интегратора 33 управляет одновременно двумя рулевыми поверхностями самолета - через сумматор 20 элеронами и через масштабирующий блок 40 и сумматор 21 - рулем направления. При этом заданное значение угловой скорости крена ωхзад формируется как от РУС (по цепи ДПР 1→фильтр 5→нелинейный блок 22→масштабирующий блок 34→сумматор 30), так и от педалей (по цепи ДПП 8→фильтр 4→фильтр 27→нелинейный блок 28→масштабирующий блок 29→сумматор 30).
Сигналы, поступающие на входы 3, 4 и 5 сумматора 21 от датчиков ДПП 8, ДУС 9 и ДЛУ 10 через соответствующие блоки, обеспечивают приемлемые статические и динамические характеристики управления самолетом в канале рыскания при управлении педалями. Дополнительный сигнал угла скольжения β с выхода ДУАС 11, поступающий через фильтр 36 подавления помех, масштабирующий блок 37 и ключ 38 (при его замыкании) на сумматор 21 служит для улучшения динамических характеристик управления в канале рыскания при малых скоростных напорах (qдин≤200 кг/м2).
Сигналы, поступающие на входы 1 и 2 сумматора 20 от ДПР 1 и ДУС 2 через соответствующие блоки обеспечивают приемлемые статические и динамические характеристики управления в канале крена (при его изолированном рассмотрении).
Сигнал с выхода ДПР 1, подключенный через масштабирующий блок 14 и фильтр 39 к первому входу сумматора 20, служит для снижения влияния на движение в канале рыскания при управлении креном от РУС.
Использование, во-первых, астатического (интегрального) контура отработки заданных значений угловой скорости крена и, во-вторых, одновременное управление сигналом с интегратора 33 элеронами и рулем направления в заявляемой системе дистанционного управления самолетом в боковом движении позволяет:
1) Обеспечивать автоматическую балансировку самолета в канале крена и снижать, за счет этого, психофизическую нагрузку на летчика, задачей которого остается балансировка только в одном канале (рыскания) вместо двух (крен и рыскание). Эффект достигается за счет введения зоны нечувствительности в блоке 28, блокирующей формирование сигнала ωхзад от ДПП 8 в случае, когда педали находятся в балансировочном положении. При таком положении педалей и при нейтральном положении РУС креном сигнал заданной угловой скорости ωхзад становится равным нулю. Если в этот момент сигнал угловой скорости крена ωх не равен нулю, возникает сигнал на выходе интегратора 38, который, воздействуя на элероны и руль направления, осуществляет обнуление угловой скорости крена ωх, обеспечивая, тем самым, балансировку самолета.
2) Добиваться желаемых значений критерия управляемости в боковом движении  при даче педалями. Использование сигнала с датчика ДПП 12 в формировании заданной угловой скорости крена ωхзад по цепи ДПП 8→фильтр 4→фильтр 27→нелинейный блок 28→масштабирующий блок 29→сумматор 30 за счет надлежащего выбора передаточного числа масштабирующего блока 29 позволяет управлять величинами возникающих угловых скоростей крена ωх и, тем самым, добиваться желаемого соотношения угловых скоростей ωх и ωу. На фиг. 3, в качестве примера, представлены графики изменения угловых скоростей крена и рыскания при фиксированной даче педалей Хп=70 мм с использованием интегрального контура управления и без него. Как видно из представленных переходных процессов, установившееся значение нежелательной при действии педалями угловой скорости крена в системе с интегральным контуром управления (ωxint)уст значительно меньше, чем в статической системе (ωxSt)уст, причем (ωxint)уст может регулироваться по усмотрению разработчика системы управления.
при даче педалями. Использование сигнала с датчика ДПП 12 в формировании заданной угловой скорости крена ωхзад по цепи ДПП 8→фильтр 4→фильтр 27→нелинейный блок 28→масштабирующий блок 29→сумматор 30 за счет надлежащего выбора передаточного числа масштабирующего блока 29 позволяет управлять величинами возникающих угловых скоростей крена ωх и, тем самым, добиваться желаемого соотношения угловых скоростей ωх и ωу. На фиг. 3, в качестве примера, представлены графики изменения угловых скоростей крена и рыскания при фиксированной даче педалей Хп=70 мм с использованием интегрального контура управления и без него. Как видно из представленных переходных процессов, установившееся значение нежелательной при действии педалями угловой скорости крена в системе с интегральным контуром управления (ωxint)уст значительно меньше, чем в статической системе (ωxSt)уст, причем (ωxint)уст может регулироваться по усмотрению разработчика системы управления.
3) Упростить режим стабилизации летчиком заданного крена во всем диапазоне его изменения на режимах малого скоростного напора (при больших углах атаки). Поведение самолета в канале крена становится ближе к нейтрально устойчивому, что позволяет удерживать достигнутый угол крена после возврата РУС в нейтральное положение. На фиг. 4, в качестве примера, представлены графики изменения угла крена с статическим и с интегральным контурами управления. Выбранные значения Xrkr St и Xrk rint соответствуют набору углов крена приблизительно до одинаковых значений в обоих случаях. Как видно, после возвращения РУС в нейтральное положение угол крена с включенным интегральным контуром управления gamma int практически сохраняет достигнутое значение, в то время как с отключенным интегральным контуром управления (как в прототипе) угол крена gamma St не фиксируется и продолжает изменяться.
4) Облегчить решение задачи предотвращения обратной реакции по крену на больших углах атаки. Известно, что явление обратной реакции по крену заключается в существенном уменьшении угловой скорости крена (в пределе - вплоть до смены знака) по мере возрастания угла атаки при фиксированной даче РУС. На фиг. 5 представлен пример процессов изменения угла крена и угловой скорости крена при одновременной даче ручки управления по крену и тангажу - при т.н. «косой даче» РУС. Полной даче ручки управления по тангажу соответствует предельно допустимое значение угла атаки αдоп. По мере увеличения угла атаки угловая скорость крена вопреки привычному поведению (возрастанию) уменьшается, причем возникающий «провал» угловой скорости крена с интегральным контуром управления в несколько раз меньше, чем со статическим контуром управления. Соответственно с этим меньше и замедление в отработке угла крена - с интегральным контуром управления угол крена продолжает нарастать значительно быстрее.
К положительному эффекту в заявляемой системе дистанционного управления самолетом в боковом движении приводит также включение префильтров 23 и 26 в цепи прохождения сигналов от РУС и педалей на рулевые приводы 18 и 19. За счет ограничения максимальных значений скорости изменения сигналов на выходах префильтров 23, 26 исключается режим работы приводов с насыщением по располагаемым скоростным характеристикам, что особенно важно при управлении маневренными самолетами, приближающимися по своим характеристикам к статически неустойчивым объектам управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА ПО ПЕРЕГРУЗКЕ | 2019 |
|
RU2711040C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2021 |
|
RU2768310C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВУХКИЛЕВОГО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2020 |
|
RU2765837C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2383466C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА | 2019 |
|
RU2719711C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
Изобретение относится к области авиационной техники, а именно к системам дистанционного управления самолетом в боковом движении. Применяют астатический (интегральный) контур отработки заданных значений угловой скорости крена и управляют сигналом с интегратора элеронами и рулем направления. Улучшаются характеристики управляемости в боковом движении, а именно: обеспечивается автоматическая балансировка самолета в канале крена и облегчается выполнение балансировки летчиком в ручном режиме только в одном канале - в канале рыскания; обеспечивается желаемое значение критерия управляемости в боковом движении  при даче педалями; облегчается решение задачи предотвращения обратной реакции по крену на больших углах атаки; упрощается режим стабилизации летчиком заданного крена за счет того, что поведение самолета в канале крена ближе к нейтрально устойчивому; обеспечивается работа рулевых приводов в линейной зоне изменения скоростных характеристик. 6 ил.
при даче педалями; облегчается решение задачи предотвращения обратной реакции по крену на больших углах атаки; упрощается режим стабилизации летчиком заданного крена за счет того, что поведение самолета в канале крена ближе к нейтрально устойчивому; обеспечивается работа рулевых приводов в линейной зоне изменения скоростных характеристик. 6 ил.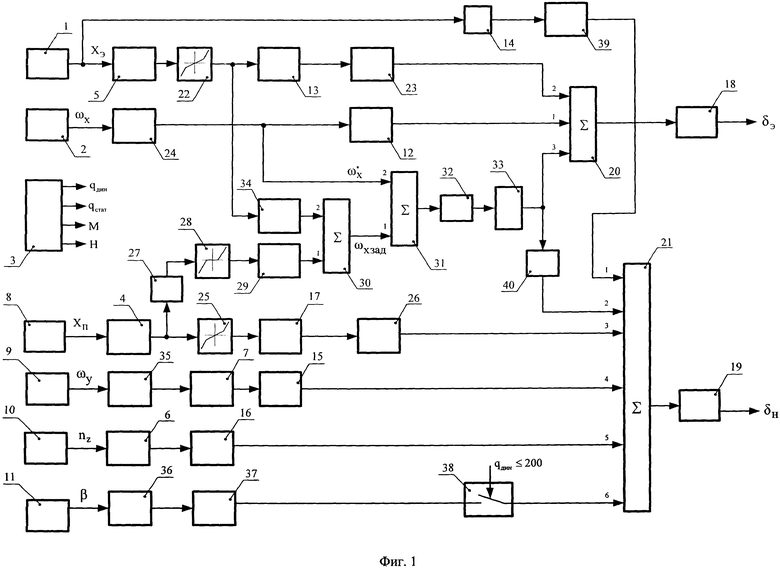
Система дистанционного управления (СДУ) самолетом в боковом движении, содержащая датчик положения ручки (ДПР) управления самолетом по крену, датчик угловой скорости (ДУС) крена ωX, систему воздушных сигналов (СВС), формирующую сигналы динамического и статического скоростного напора, числа М и высоты полета Н, первый, второй и третий фильтры подавления помех, форсирующий фильтр, датчик положения педалей (ДПП), выход которого соединен с входом первого фильтра подавления помех, ДУС рыскания ωy, датчик линейных ускорений (ДЛУ) в боковой плоскости, датчик углов атаки и скольжения (ДУАС), первый, второй, третий, четвертый, пятый и шестой масштабирующие блоки, рулевой привод элеронов, рулевой привод руля направления, первый сумматор, первый вход которого соединен с выходом первого масштабирующего блока и выход которого подключен к входу рулевого привода элеронов, второй сумматор, выход которого соединен с входом рулевого привода руля направления, вход второго фильтра подавления помех соединен с выходом ДПР, отличающаяся тем, что дополнительно содержит первый нелинейный блок, выход которого подключен к входу второго масштабирующего блока, а вход - к выходу второго фильтра подавления помех, первый предварительный фильтр (префильтр), вход которого соединен с выходом второго масштабирующего блока, а выход - со вторым входом первого сумматора, четвертый фильтр подавления помех, вход которого подключен к выходу ДУС крена ωX, а выход - к входу первого масштабирующего блока, второй нелинейный блок, второй префильтр, последовательно соединенные низкочастотный фильтр, третий нелинейный блок, седьмой масштабирующий блок, третий и четвертый сумматоры на два входа каждый, восьмой масштабирующий блок и интегратор, девятый масштабирующий блок, вход которого подключен к выходу первого нелинейного блока, а выход - ко второму входу третьего сумматора, пятый фильтр подавления помех, вход которого соединен с выходом ДУС рыскания ωy, а выход - с входом форсирующего фильтра, последовательно соединенные шестой фильтр подавления помех, десятый масштабирующий блок и ключ, коммутируемый по сигналу qдин с выхода СВС, седьмой фильтр подавления помех, вход которого соединен с выходом третьего масштабирующего блока, одиннадцатый масштабирующий блок, при этом первый сумматор снабжен третьим входом а второй сумматор - дополнительным входом, вход третьего масштабирующего блока подключен к выходу ДПР, выход второго нелинейного блока через шестой масштабирующий блок - к входу второго префильтра, второй вход четвертого сумматора - к выходу четвертого фильтра подавления помех, выход интегратора - к третьему входу первого сумматора и к входу одиннадцатого масштабирующего блока, выход первого фильтра подавления помех - к входам низкочастотного фильтра и второго нелинейного блока, выход форсирующего фильтра - к входу четвертого масштабирующего блока, вход и выход третьего фильтра подавления помех - соответственно к выходу ДЛУ и к входу пятого масштабирующего блока, выход ДУАС по сигналу β - к входу шестого фильтра подавления помех, а выходы седьмого фильтра подавления помех, одиннадцатого масштабирующего блока, второго префильтра, четвертого и пятого масштабирующих блоков и ключа соединены с входами второго сумматора.
| Бюшгенс Г.С., Студнев Р.В | |||
| Аэродинамика самолета: Динамика продольного и бокового движения | |||
| - М.: Машиностроение, 1979, 352 стр | |||
| (стр | |||
| Мяльно-трепальный станок для обработки тресты лубовых растений | 1922 |
|
SU200A1 |
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| Рудис В.А | |||
| Полуавтоматическое управление самолетом | |||
| - М.: Машиностроение, 1978, 152 стр | |||
| (стр | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2383466C1 |

