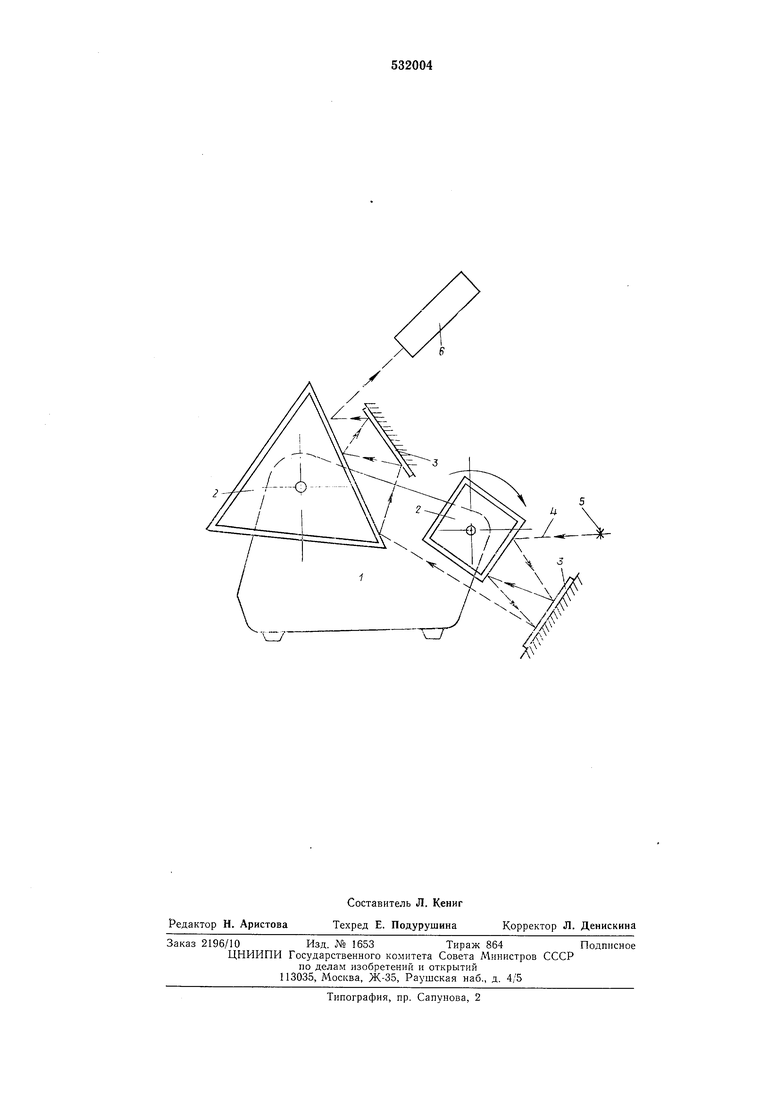
ленного на соответствующее подвижное зеркало. Устанавливают источник 5 параллельного пучка световых лучей и измеритель 6 углового положения луча (например, теодолит, автоколлиматор и пр.) так, чтобы луч 4 света попал последовательно на оба оптических умножителя и, претерпев в них много-кратное отражение, попал в измеритель 6.
При этом обеспечивают необходимые условия: от юшение количеств «i и П2 отражений от каждого из подвижных зеркал должно быть равно модулю поминального передаточного отношения контролируемого механизма п : «2 /i/. Измеряют угловое положение луча измерителем 6, иепрерывно Брани1я звенья механизма.
В случае отсутствия кинематической погрешности в механизме угловое положение луча, претерпевшего умножение FJ двух умножителях и попавшего в измеритель 6, остается неизменным, т. к. угловое отклонение иосле первого умиожителя нолностью скомнеисируется равным по величине, но обратным по направлению отклонением луча, происшедшем во втором умножителе.
Если кинематическая погрешность имеет место, то разность отклонений не остается равной нулю, а величина этой разности определяет величину кинематической погрешности механизма. При этом, если при повороте одного из звеньев на некоторый угол зафиксировано угловое смеш,ение луча, равное Л(3, то величина кинематической погрешности в составляет
дэ..
2л
где п - количество отражений луча от зеркала, закрепленного на звене.
Формула изобретения
Способ измерения кинематической погрешности механизмов в работе, заключаюш,ийся в том, что на конечных звеньях механизма закрепляют онтические умножители углов новорота обоих звеньев, а луч от неподвижного нсточннка направляют последовательно на умножители, где он многократно отражается от иодвижных и неподвижных отражателей
умножителя, и наблюдают выходящий луч, по отклонению которого судят о кинематической погрешности механизма, отличающийся тем, что, с целью контроля механизмов с любым передаточным отношением, количество
отражений луча в каждом из умножителей и значение передаточного отношения выбирают из условия:
Л : «2 i,
где rii и «2 - количество отражений луча от подвижных отражателей соответственно первого и второго умножателя;
i - номинальное передаточное отношение контролируемого механизма.
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство № 297863, М. Кл.О 01В 11/26, 1971 г.
2. Авторское свидетельство СССР № 224846 М. Кл.2 G 01В 11/26 1966 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения кинематической погрешности механизма | 1971 |
|
SU629445A1 |
| Устройство для измерения кинематической погрешности механизмов | 1981 |
|
SU1013752A1 |
| Интерференционный способ измерения кинематической погрешности механизмов в работе | 1972 |
|
SU518618A1 |
| Способ измерения кинематической погрешности механизмов с единичным передаточным отношением | 1972 |
|
SU605080A1 |
| Устройство для измерения кинематической погрешности механизмов | 1977 |
|
SU678274A1 |
| Способ измерения параметров механизма | 1973 |
|
SU506758A1 |
| Измеритель крутящего момента | 1977 |
|
SU685938A2 |
| Оптико-электронное устройство для контроля неплоскостности | 1988 |
|
SU1499115A2 |
| Измеритель крутящего момента | 1975 |
|
SU573729A1 |
| СПОСОБ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНОЙ ПРОДОЛЬНОЙ ДЕФОРМАЦИИ ПОВЕРХНОСТИ И ЭКСТЕНЗОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2575795C2 |