вать работу муфты при вышеупомянутых задаваемых параметрах.
Целью изобретения является получение углового, а также одновременно радиального и углового смещения осей соединяемых валов.
Для этого Б предлагаемом стенде радиально-подвижный вал установлен на сферических подшипниках в двух парах эксцентричных втулок, расположенных в корпусе опоры с возможностью относительного поворота.
С целью исключения влияния колебательного движения и смещения радиально-подвижного вала при динамическом и статическом нагружении испытываемой муфты стенд снабжен неподвижным валом с механизмом его статического нагружения, выполненным, например, в виде червячной пары, соединенным посредством жесткой компенсирующей муфты с радиально-подвижным валом.
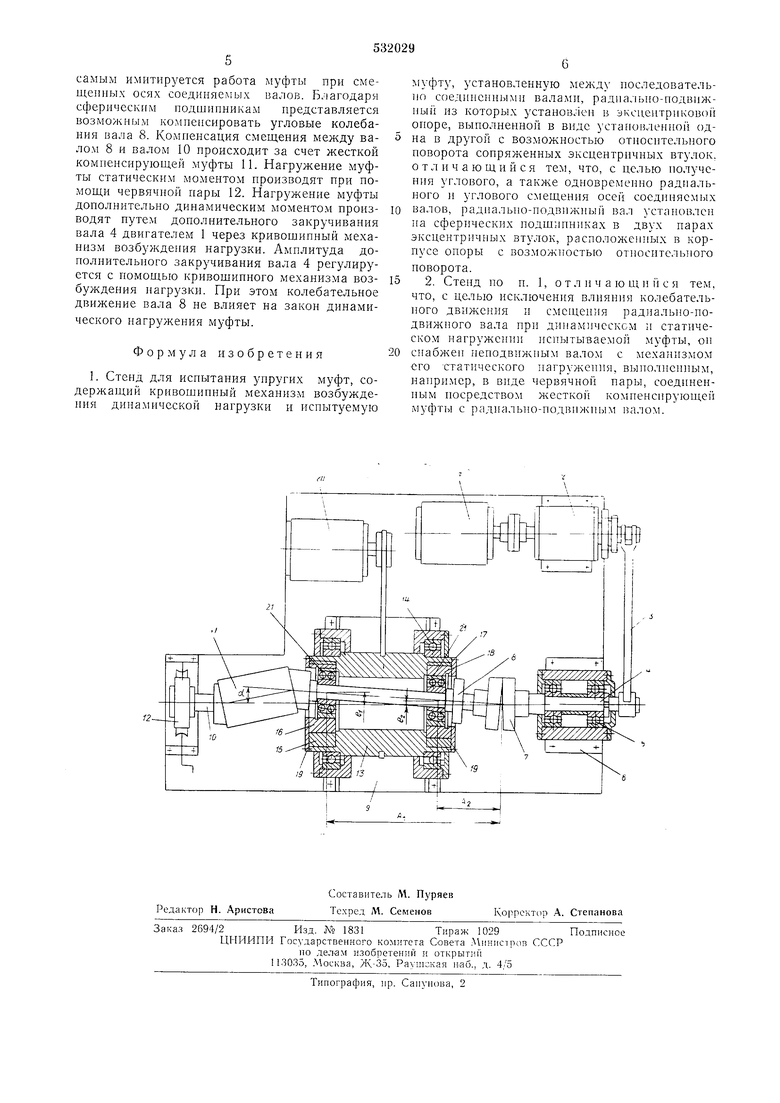
На чертеже изображена принципиальная схема стенда для испытания упругих муфт.
Стенд состоит из электродвигателя 1, кривошипного механизма 2 возбуладения нагрузки, содержащего эксцентриковую головку, которая позволяет получить изменение эксцентриситета благодаря взаимному повороту двух эксцентриков и рычага 3, одним концом шарнирно соединенного с эксцентриковой головкой, другим жестко закрепленном на валу 4.
Вал 4 на подшипниках качения 5 установлен в опоре 6. На выходном конце вала 4 устанавливается одна из полумуфт испытываемой муфты 7, а другая полумуфта устанавливается на радиально-подвижном валу 8, величина смещения оси которого регулируется с помощью эксцентриковой опоры 9.
Вал 8 соединен с неподвижным валом 10 (соосно расположенным с валом 4) при помощи жесткой компенсирующей муфты 11 (например, зубчатой). Неподвижный вал 10 может через червячную пару 12 нагружаться статическим крутящим моментом. Эксцентриковая опора 9 состоит из корпуса 13, который установлен соосно с валом 4 на станине в подшипниках 14. В цилиндрических расточках корпуса установлены две пары сопряженных эксцентричных втулок 15, 16 и 17, 18.
Оси наружных и внутренних цилиндрических поверхностей каждой сопрягаемой эксцентричной втулки смещены на одну и ту же величину. Ноэтому имеется относительное положение сопрягаемых втулок, когда ось внутренних цилиндрических поверхностей внутренних эксцентричных втулок совпадает с осью наружных цилиндрических поверхностей наружных эксцентричных втулок. Каждая внутренняя эксцентричная втулка может самостоятельно разворачиваться относительно своей наружной эксцентричной втулки, а каждая пара сопряженных втулок может самостоятельно разворачиваться относительно друг друга и корпуса 13.
На время испытаний втулки от проворота закрепляются в корпусе опоры фланцами 19. Корпус 13 опоры приводится во вращение с
помощью двигателя 20 через клиноременную передачу. Вал 8 установлен во внутренних эксцентричных втулках 16 и 18 па сферических подшиппиках 21.
Стенд работает следующим образом.
Для реализации работы муфты при определенном смещении осей соединяемых муфтой валов устанавливается требуемое смещение оси вала 8 относительно вала 4 с помощью эксцентриковой опоры 9. Для этого необходимо установить расчетную величину эксцентриситета осей сферических подшипников 21 относительно оси корпуса 13 при помощи разворота внутренних и наружных втулок. Затем путем разворота одной из сопряженных пар эксцентричных втулок относитеотьно корпуса 13 опоры устанавливают центры сферических ПОДП1ИПНИКОБ в одной плоскости, проходящей через ось вала 4.
Для получения радиального (параллельного) смещения оси вала 8 относительно осп вала 4 пеобходимо, чтобы расчетный эксцентриситет центров каждого сферического подшипника был одинаков и равнялся:
e ,
где Bi и 62 - соответственно расчетные эксцентриситеты центров подшипников 21 относительно оси корпуса 13;
е - задаваемое радиальное (параллельное) смещение оси вала 8 относительно оси вала 4.
Для получения углового смещения оси вала 8 относительно оси вала 4 пеобходимо установить следующий эксцентриситет оси каждого сферического подшипника:
ei Ai-tga e2 A2-tga,
где AI и А2 - соответственно расстояние от муфты до центров сферических подшипников 21; а - задаваемое угловое смещение
осей валов.
Для получения одновременно радиального и углового смещения необходимо установить следующие смещения осей сферических подшипников:
ei e+Ai-tga e2 e+A2-tga,
где е и а - соответственно одновременно задаваемые радиальное и угловое смещение оси вала 8 относительно вала 4.
Задав определенное смещение и приводя во вращение двигателем 20 при помощи клиноременной передачи корпус эксцентриковой опоры, который вращается на подшипниках 14, тем самым придают движение эксцентриситетам осей сферических подшипников относительно оси корпуса 13 опоры (т. е. относительно оси вала 4).
В силу того, что вал установлен в сферических подшипниках, ои не вращается, а совершает колебательное движение относительно оси корпуса 13 опоры (т. е. оси вала 3) и тем
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи кислорода в конвертер | 1979 |
|
SU926019A1 |
| Волновая передача | 1991 |
|
SU1796808A1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| Стенд для испытания резинометаллических шарниров гусеничных цепей | 1984 |
|
SU1163185A1 |
| Дисковые кромкообрезные ножницы | 1988 |
|
SU1669643A1 |
| Стенд для испытания приводов колесных пар локомотивов | 1985 |
|
SU1401325A1 |
| Импульсный вариатор | 1979 |
|
SU806950A1 |
| Стенд для испытания муфт | 1990 |
|
SU1763925A1 |
| Устройство для орбитальной сваркиТРЕНиЕМ | 1979 |
|
SU814627A1 |
| РЕДУКТОР | 1992 |
|
RU2011067C1 |
