1
Изобретение относится к области автоматики и телемеханики и может быть исиользовано в системах автоматического или дистаниионного управления в устройствах с использованием герконов.
Известны способы контроля рассогласования углового положения вала, но для их реализации требуется столько герконов, сколько валов контролируется. Например, в случае контроля рассогласования углового положения двух радиально намагниченных валов требуется два геркона.
По предлагаемому способу для той же цели требуется на один геркон меньше.
Цель изобретения - упрощение, повышение точности и надежности определеиия рассогласования.
Для этого по предлагаемому способу геркон раснолагается между двумя вращающимися радиально намагниченными валами и магнитно включенными последовательно с ним, определяется время нахождения геркона в замкнутом и разомкнутом состояниях и по полученным данным судят об искомой величине рассогласования.
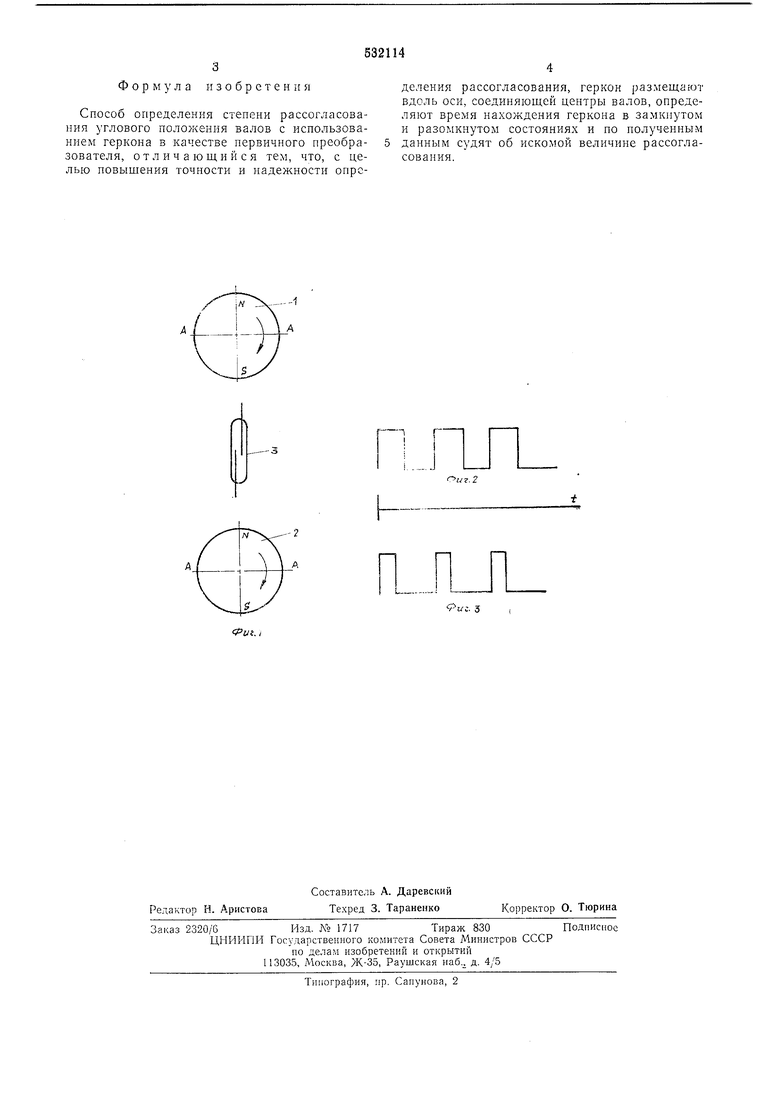
На фиг. 1 схематично .показано расположение валов геркона; на фиг. 2 и 3 - диаграммы замыкания контактов при вращении валов в согласоваином и рассогласованном положениях соответственно.
2
При вращении контролируемых валов 1 и 2, если противоположные полюса намагниченных валов находятся против геркона 3. последний срабатывает, замыкая сигнальную цепь, т. к. магнитная цень геркона будет последовательно включаться с магнитами. При ощхронном повороте валов таким образом, чтобы нсйаральная линия А-А установилась вдоль геркона, последний размыкается.
При начальной установке валов так, чтобы их одноименные нолюса находились против геркона, носледний находится в разомкнутом (несработанном) состоянии при синхронном повороте валов.
При развороте валов так, чтобы линии А-А не были параллельны, время нахождения контактов в замкнутом состоянии будет 1 зменяться. Например, при вращении валов в согласованном ноложении диаграмма замыкания и ieет вид, показанный на фиг. 2 (в случае начального положения разиоименных полюсов против геркона). При некотором рассогласовании диаграмма имеет вид, представленный на фиг. 3.
Полученные сигналы могут быть детектированы, например, при помощп 1звестной интегрирующей схемы на резисторе и кокденсаторе. Кроме того, полученные сигналы могут модулировать несущую частоту при телемеханическом сиособе передачи информации.
Формула изобретения
Способ определения степени рассогласования углового положения валов с использованием геркона в качестве первичного преобразователя, отличающийся тем, что, с целью повышения точности и надежности определения рассогласования, геркон размещают вдоль оси, соединяющей центры валов, определяют время нахождения геркона в замкнутом и разомкнутом состояниях и по полученным данным судят об искомой величиие рассогласования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления подвижным объектом | 1983 |
|
SU1100611A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ПРИ РАЗБЕГЕ-ПРОБЕГЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1807655A1 |
| ДАТЧИК ПЕРЕМЕЩЕНИЯ ОБОРУДОВАНИЯ ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ВАРИАНТЫ) | 2008 |
|
RU2378184C1 |
| УСТРОЙСТВО ВКЛЮЧЕНИЯ ПРОТИВОУГОННОЙ СИГНАЛИЗАЦИИ | 1996 |
|
RU2104184C1 |
| СПОСОБ ОЦЕНКИ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК РАСПРЕДЕЛИТЕЛЬНОГО УСТРОЙСТВА И РАСПРЕДЕЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ УКАЗАННОГО СПОСОБА | 2012 |
|
RU2621902C2 |
| Устройство для контроля положения каретки стеллажного крана-штабелера | 1986 |
|
SU1466991A1 |
| ПОЛЯРИЗОВАННЫЙ ГЕРКОН И ПОЛЯРИЗОВАННОЕ КОММУТАЦИОННОЕ УСТРОЙСТВО | 2011 |
|
RU2474000C1 |
| Поворотный переключатель | 1987 |
|
SU1432628A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2231202C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 1973 |
|
SU399897A1 |
Г
fi
С-и-г.2
11
Pi/c. 3
