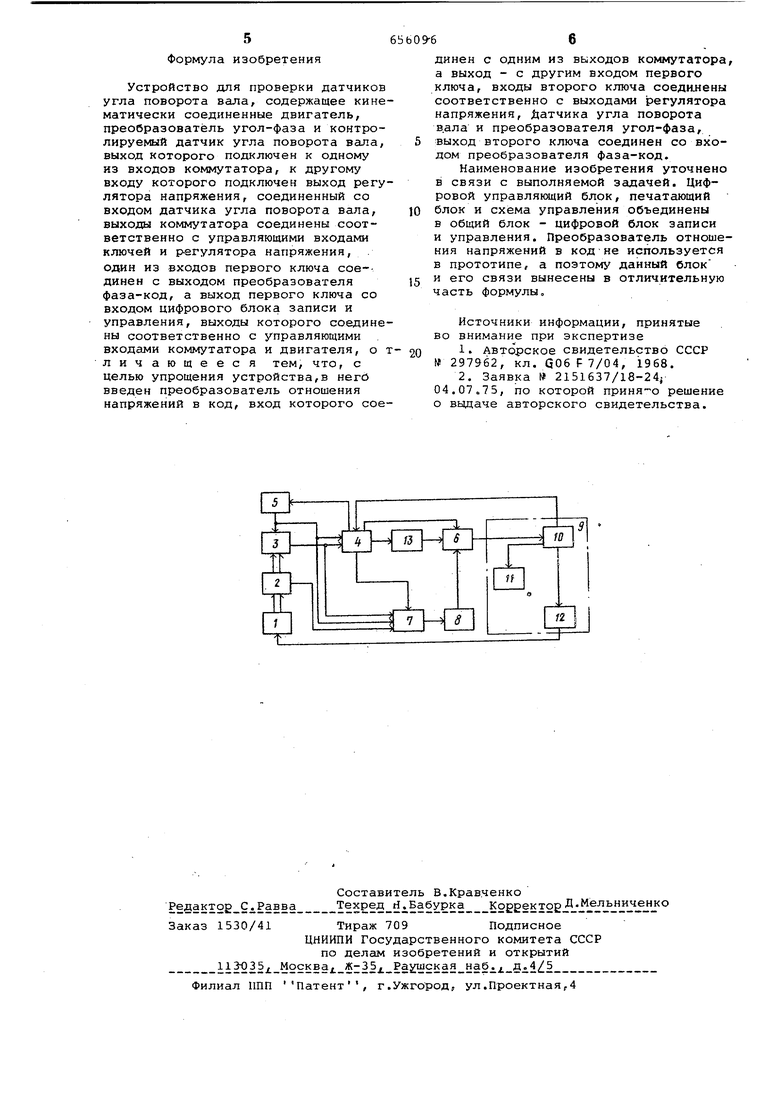
Устройство содержит кинематически соединенные двигатель 1, преобразователь угол-фаза 2 и контролируемый датчик 3 угла поворота вала, выход которого подключен к одному из входо коммутатора 4, к другому входу которого подключен. выход регулятора 5 напряжения,, соединенный со входом датчика 3 угла поворота вала, выходы коммутатора 4 соединены соответственно с управляющими входами ключей 6 и 7 и регулятора 5 напряжения. один из входов первого ключа 6 соединен с выходом преобразователя фаза-код 8, а выход первого ключа 6 - со входом цифрового блока 9 запири и управления, который включает программный цифровой блок 10 управления, блок 11 записи и блок 12 управления двигателем 1.
Выходы цифрового блока 9 записи и управления соединены соответствен но с управляющими входами коммутатор 4 и двигателя 1. Выход коммутатора 4 через преобразователь 13 отношения напряжения в код соединен с другим входом первого ключа 6, Входы второго ключа 7 соединены соответственно с выходами регулятора 5 напряжения, датчика 3 угла поворота вала и преобразователя 2 угол-фаза, выход второго ключа 7 соединен со входом преобразователя 8 фаза-код.
Работа предлагаемого устройства происходит следующим образом.
Напряжения с выхода контролируемого датчика 3 угла поворота вала и выхода регулятора 5 напряжения через коммутатор 4 поступают на вход преобраэбвателя 13 отношения напряжений в код, с выхода которого сигнал о величине отношения напряжений через ключ 6 поступает на вход цифрового блока 9 записи и управленияf эти же напряжения через ключ 7 поступают на вход преобразователя фаза-код 8р с выхода которого сигнал о фазе между напряжениями через ключ б поступает на вход цифрового блока 9 записи и управления, который по заданной программе управляет работой коммутатора 4 и через блок 12 управления двигателем 1. Двигатель 1 поворачивает валы датчика 3 угла поворота и преобразователя угол-фаза 2. CиVнaл об угловом положении датчика 3 угла поворота с преобразователя 2 nXjCTytiaeT через ключ 3 на вход преобр4з6вателя фаза-код 8 и далее через ключ 6 на вход цифрового блока записи управления 9. Обработанные результаты измерений отношения амплитуд напряжений, фаз напряжений и угла поворота вала поступают в блок 11 за писи. Коммутатор 4 по командам, поступающим От програмного цифрового блоха 12 управления, управляет ключами 6,7 и регулятором 5 напряжения.
Рассмотрим проверку с помощью предлагаемого устройстваг например
погрешности отображения синусной зависимости вращающегося трансформатора (ВТ) .
Первоначально определяется нулево положение ротора ВТ. С этой целью, согласно программе измерений, с выхода программного цифрового блока 10 управления подается команда на блок 12 управления двигателем 1. С выхода его напряжение подается на управляющую обмотку двигателя 1, .который приводит во вращение вал контролируемого датчика угла поворота вала 3 и вал преобразователя угол-фаза 2. Двигатель 1 поворачивает вал датчика 3 угла поворота (ротор ВТ), всторону, соответствующую его истинному нулевому положению. При вращении двигателя информация об угловом положении вала ВТ и отношения его выходного напряжения к входному с преобразователя фаза-код 8 и преобразователя 13 отношения напряжения в код через ключ 6 поступает в программный цифровой блок 10 управления. Угловое положение ротора ВТ, соответствующее минимуму отношения напряжений, регистрируется в памяти блока 10 как нулевое. .
При наличии шкалы у преобразователя 13 установка в нулевое положение может быть осуществлена и по другому алгоритму В этом случйе двигатель 1 по командам блока 10 и управляющим сигналам блока 12 осуществляет грубое приведение ротора ВТ в зону нулевого положения. Точное приведение осуществляется затем оператором, доворачивающим, например, корпус ВТ JHo получения минимального отношения, напряжений по шкапе преобразователя 13 отношения напряжений в код. I . ,
После определения нулевого положения двигатель 1 по командам блока 10 И управляющим сигналам блока 12 поворачивает ротор ВТ последовательно на углы, соответствующие принятому шагу измерения. Информация о точном угловом положении ротора ВТ, отношении выходного напряжения контролируемой обмОтки колвходному и разности фаз напряжений«на выходе регулятора 5 и выходного напряжения ВТ с выхода преобразователей 13 и 8 через ключ 6 поступает в блок 10. В блоке 10 по заданной программе производится обработка результатов измерени и выдача их в блок записи для печати
В блок 10 закладываются программы управления процессом измерения и контроля и математической обработки полученных результатов.
Таким образом, исключением одного преобразователя угол-фаза достигается упрощение устройства. Соединение обмоток контролируемой машины непосредственно со входом преобразователя фаза-код повышает его точность. Формула изобретения Устройство для проверки датчик угла поворота вала, содержащее ки матически соединенные двигатель, преобразователь угол-фаза и контро лируемый датчик угла поворота вала выход которого подключен к одному из входов коммутатора, к другому входу которого подключен выход рег лятора напряжения, соединенный со входом датчика угла поворота вала, выходы коммутатора соединены соответственно с управляющими входами ключей и р-егулятора напряжения, . один из входов первого ключа сое-. динен с выходом преобразователя фаза-код, а выход первого ключа со входом цифрового блока записи и управления, выходы которого соедин ны соответственно с управляющими входами коммутатора и двигателя, о личающееся тем, что, с целью упрощения устройства,в него введен преобразователь отношения напряжений в код, вход которого со -6 динен с одним из выходов коммутатора, а выход - с другим входом первого .ключа, входы второго ключа соединены соответственно с выходами регулятора напряжения, Датчика угла поворота вала и преобразователя угол-фаза, выход второго ключа соединен со входом преобразователя фаза-код. Наименование изобретения уточнено в связи с выполняемой задачей. Цифровой управляющий блок, печатающий блок и схема управления объединены в общий блок - цифровой блок записи и управления. Преобразователь отношения напряжений в код не используется в прототипе, а поэтому данный блок и его связи вынесены в отличительную часть формулы. Источники информации, принятые во внимание при экспертизе Авторское свидетельство СССР «297962, кл. Q06F7/04, 1968. 2. Заявка № 2151637/18-24, 04.07.75, по которой приня-о решение о вьщаче авторского свидетельства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля электрических машин | 1976 |
|
SU633058A1 |
| Устройство для контроля электрических машин | 1975 |
|
SU532871A1 |
| Устройство для контроля электрических машин | 1974 |
|
SU535586A1 |
| Устройство для измерения ошибок позиционирования шагового электродвигателя | 1990 |
|
SU1697254A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1982 |
|
SU1055980A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1330725A1 |
