1
Изобретение относится к механнческим испытаниям материалов, а именно, к приборам для оцеики жесткости кольневых пленочиых образцов.
Известен прибор 1 для определения жесткости и упругости тонких кольцевых образцов, содержащий основание, нагружаюищй механизм и устройство для замера деформащи испытуемого образца.
Недостатками прпбора является певысокая точпость измерений, а также низкая степень автоматизации ироцесса исиытаиия.
Известен и другой прибор 2 для оиределепия жесткости кольцевых плеиочпых образнов, содержащий осиование н установленные на нем нагружающий рычаг первого рода, подвижно расположенный на одном его плече груз, и приспособление для перемеидення груза в виде связанного с приводом кронщтейна и закрепленной на нем гибкой связи, взаимодействующей с грузом, опору, установленную на рычаге, захват для закрепления испытуемого образца, контактный задатчик деформации и измерительное устройство.
Этот ирибор наиболее близок к предложеиному ио технической супщостп и достигаемому )езультату. К числу его иедостатков следует отнести невысокую точиость измереиия нагрузки, прпкладывае.мой к образцу, что существеппо влияет па качество экспернмента, особенно нри большнх дефор.мациях испытуемого образца.
Цель изобретения - повыщение точностн иснытаний кольцевых плеиочиых образцов.
Согласно нзобретению кронштейн нриснособлеиия для иеремеидепия груза выполнен П-образиой формы, а гибкая связь закренлена между его сторонами под углом относительно оси рычага, выбираемым нз условия обеспечения перпендикулярности .нриложения к нему нагрузки при задаиной деформации образца.
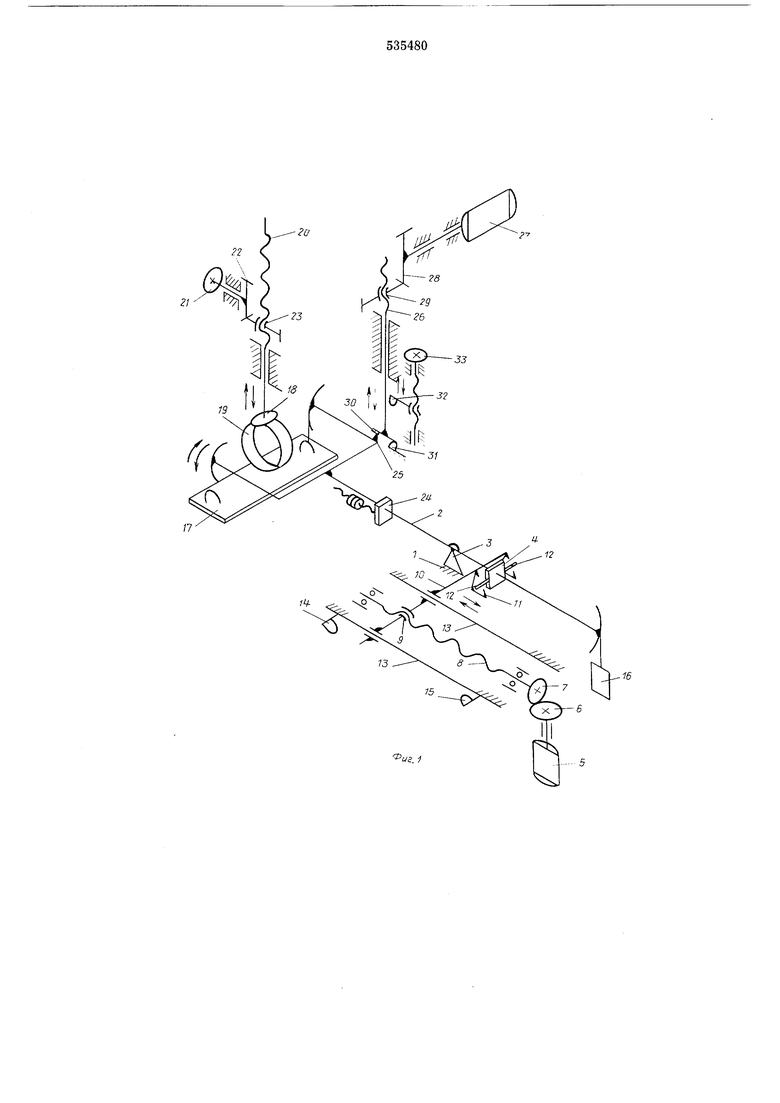
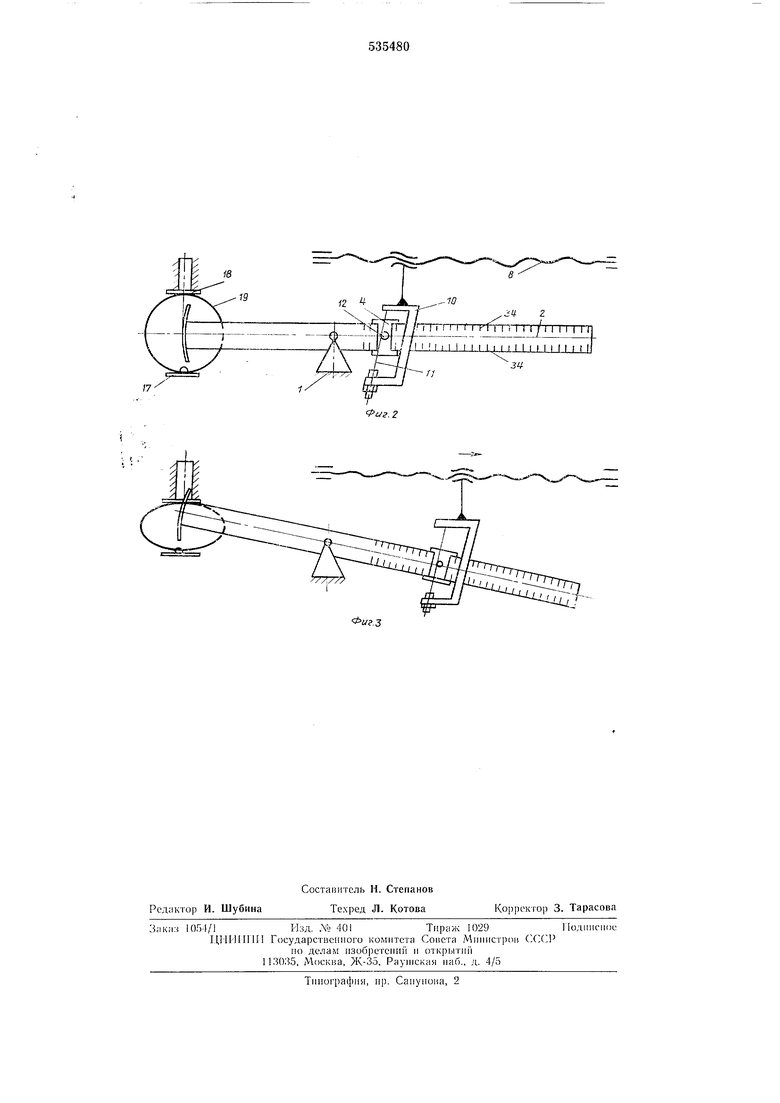
На фиг. 1 изображена прннциниальная схема нрибора; па фиг. 2 - положение механнзма нагружения в иачальной стаднн испытания; на фиг. 3 - то же, в конце иепытання.
На основании 1 уетаповлен механизм нагружения прибора, соетоящпй из рычага 2 первого рода, шарннрно закренленного на опоре 3, и груза 4, получающего движение вдоль рычага 2 от привода.
Привод состоит из электродвигателя 5, фрикционных дисков 6 и 7, виита 8 с гайкой 9, к которой ирикренлеио нриспособлеппе для иеремещеиия груза 4, выиолиеииое в виде Н-об шзиого кроии1тейиа 10 и закреилеппой па пем гибкой связи 11, коитактпруюп1,ей с осями 12 груза 4. Кроииггейи 10 иеремен1,ается вдоль нанравляюншх 13, закренлеииых н основаими. Конечные положения груза фнкснруются мнкронсреключателямн 14 н 15.
На 1) 2 нодвсгпен нротнвовес 16, уравновешнвающпй онору 17, которая взанмодсйствует с закрепленным на плони1дке 18 нспытуемын образцом 19. Механизм захвата включает в себя также впит 20, который может перемен1аться от рукояткн 21 носредетвом зубчатой нередачп 22 н гайки 23.
На левом нлече рычага 2 закреплены балапенр 24 для установки рычага в нулевое ноложенне при емеие противовесов 16 в процееее наладки прибора иа еоответствуюндий диаиазои измерений нагрузок, а также контакт 25.
Контактный задатчпк деформацнн соетонт из винта 26, который иолучает перемещение от электродвигателя 27 носредетвом зубчатой нередачи 28, и гайки 29. На нижием коице виита 26 установлен контакт 30, нулевое иоложение которого задается микропереключателем 31. Величина деформаинн образца оиределяется микроиереключателем 32, который устанавливается Б заданное ноложенне рукояткой 33. .„ . Измерительное устройство соетонт из иескольких шкал 34, .размеченных в задаииых диаиазонах иагрузок иа рычаге 2. Отечет иагрузки, нриложеиной к образцу, ироизводится ио левому торну груза 4.
Нрибор работает следующим образом.
Иснытуемый образеи 19 закрепляется иа площадке 18, если ирн этом он провиснет от собственного веса, то левое плечо рычага 2 опустится, а контакт 30 разомкнется. Тогда включается электродвигатель 5 привода груза 4, который иеремещаетея вправо до тех пор, гюка контакт 30 не замкнется с контактом 25 рычага 2. Электродвигатель носле этого останавливается, а иоложеине груза 4 ио щкале 34 указывает величину нагрузки от провисания образца 19 (положение на фиг. 2).
Далее включается электродвигатель 27, нока контакт 30 не иридет в положение микропереключателя 32, соответствующее заданной величине деформации образца 19. После этого вновь включается электродвигатель 5, груз 4 перемещается но рычагу 2 вправо до тех нор, пока контакт 25 не замкнется с контактом 30. Разность иоказаиий между конечной нагрузкой, когда образец сдеформироваи на заданную величину (ноложение на фиг. 3), и первоначальной от ировисаиия образца определяет жесткость испытуемого образца.
Благодаря тому, что гибкая связь 11 закреплена между сторонамн Н-образного кроииггей)ia 10 иод углом относительно оси рычага 2, выбираемым пз условия обесиечения иерненднкулярности приложения к нему нагрузки при задаиной деформации образца, цотери ирн измерении нагрузки в коист)укцпи сведены к минимуму. Это обеснечнвает высокую точность исиытаиий образцов. Если образец 19, закреиленный на илощадке 18, не провнснет от собственного веса, контакт 25 не размыкается. В этом случае сразу включается электродвигатель 27, контакт 30 устанавливается в иоложение микроиереключателя 32. Дальнейнитя )абота автоматнки иовторяется, как и в нервом случае.
Для возвращения механизмов прнбора в иервоначальное положение электродвнгатель 5 включается иа разгрузку образиа, а электродвнгатель 27 - на онуеканне контакта 30 в исходную позицию.
Фор м у л а и 3 о б р е т е и и я
Прибор для оиределеиия жесткости кольцеВЕях илепочиых материалов, содержащий основаиие и установленные на нем нагружающий рычаг иервого рода, подвижио расположенный иа одном его плече груз, иривод и приспособление для перемещения груза в виде связанного с приводом кронгитейна н закренленной на нем гибкой связи, взаимодействующей с грузом, опору, установленную на рычаге, захват для закрепления испытуемого образца, контактный задатчик деформацнн и измерптельиое устройство, отличающийс я тем, что, с целью иовыщения точности испытаний, кронштейн выполнен П-образной формы, а гибкая связь закреплена между его сторонами иод углом относительно оси рычага, выбираемым пз условия обеспечения иерпендикулярностн приложения к нему иагрузки при заданной деформации образца.
Источники информации, принятые во внимаиие ирн экспертизе:
1.В. Н.Феоктистов п др. «Новые методы испытаний иекусствеииой кожи и иленочиых материалов. Легкая индустрия, М., 1969, фиг. 1.
2.Прибор ПЖМ, Ивмаширибор, Иваиово, 1967.
иг, i
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для определения устойчивости ворса меха к смятию | 1972 |
|
SU438898A1 |
| ПРИБОР ДЛЯ ИСПЫТАНИЯ ТКАНЕЙ НА СДВИГ | 1973 |
|
SU382954A1 |
| КОПИРОВАЛЬНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ ЛОПАСТЕЙ | 1967 |
|
SU192598A1 |
| НАГРУЖАЮЩИЙ МЕХАНИЗМ | 1965 |
|
SU172524A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ СМИНАЕМОСТИ ТКАНИ | 1972 |
|
SU327410A1 |
| Прибор для определения компрессионной кривой и бокового распора связных грунтов | 1948 |
|
SU79983A1 |
| Устройство для нагрузки нажимных валиков вытяжного прибора прядильной машины | 1955 |
|
SU103464A1 |
| Электроконтактный батарейный манометр | 1952 |
|
SU96675A1 |
| Прибор для испытания формовочных материалов при высоких температурах | 1950 |
|
SU100102A1 |
| Устройство для испытания тензометров, сдвигомеров и клинометров | 1936 |
|
SU51158A1 |