1
Изобретение относится к области автоматического регулирования объектами, имеющими запаздывания в управлении или измерении, и может быть использовано при автоматическом управлении технологическими процессами в химической, металлургической, нефтегазовой промышленности и других отраслях народного хозяйства.
Известны системы для управления объектами с запаздыванием, содержащие элемент сравнения, выход которого связан со входом регулятора, объект управления с запаздыванием, модель инерционной части объекта и блок временной задержки, которые включены в обратную связь регулятора 1, 2.
Известно также пневматическое устройство, осуществляющее компенсацию запаздывания путем его исключения из характеристического управления замкнутой системы, содержащее регулятор, модель инерционной части объекта и сумматор, положительные и отрицательные камеры которого соединены с входом и выходом звена запаздывания 3.
Однако наличие контура положительной обратной связи в известных системах затрудняет настройку схемы и может привести к незатухающим колебаниям в замкнутом контуре регулятор-модель, что уменьшает точность и быстродействие регулирования, а наличие модели объекта, состоящей из инерционной части и звена запаздывания, значително усложняет конструкцию.
Наиболее близким техническим решением к данному изобретению является система автоматического регулирования, реализующая способ компенсации запаздывания 4. Эта система содержит элемент сравнения, выход которого связан со входом регулятора, и объект управления.
Однако в этих системах на реальных объектах, имеющих запаздывание, снять сигналы после звена запаздывания практически невозможно, поэтому такие системы управления в реальнъ1Х условиях не обеспечивают достаточных точности и быстродействия регулирования.
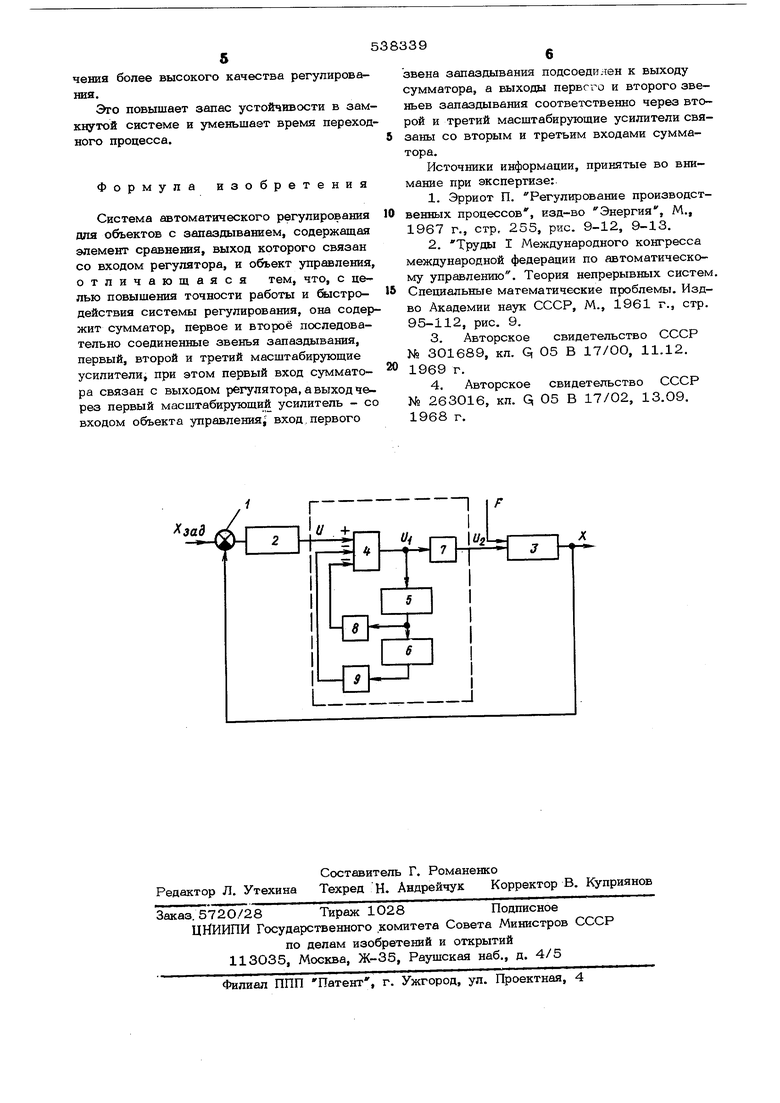
Цель изобретения - повышение точности работы и быстродействия системъ регулирования при управлении объектами с запаздыванием. Эта цепь достигается тем., что предложенная система содержит суммам .п, первый и второй последовательно сое.-.иненные звенья запаздывания, первый, второй и третий масштабирующие усилители. Первый вход сумматора связан с выходом регулятора, а выход через первый масштабирующий усилитель - со входом объекта управления. Вход первого звена запаздывания подсоединен к выходу сумматора, а выходы первого и второго звеньев запаздывания соответственно через второй и третий масштабирующие усилители связаны со вторым и третьим входами сумматора . На чертеже показана блок-схема системы Она содержит элемент сравнения 1, регу лятор 2, объект регулирования 3 с запаздыванием Б управлении или измерении, сумматор 4, первое 5 и Ьторое б звенья запазды вания, первый 7, второй 8 и третий 9 маештабирующие усилители с коэффициентами со ответственно К„, К„ и Kf-,. /оУ На чертеже обозначены задающий сигнал X , выходной сигнал X. сигнал U на вызадходе регулятора 2, сигнал U на выходе сумматора 4, сигнал U- на выходе масшт бирующего усилителя 7 и возмущающее воздействие V При действии сутенчатого возмущения Т на объект регулирования 3 на первом интервале времени Г 4- 1,5 Т формируется усилителем 7, управляющий сигнал U. LJК., (где Т - запаздывание в объекте). Это обеспечивает формирование управляющего сигнала в начальный момент времени На втором интервале времени 1,5 Т -V -:-2 IT общий коэфф|ициент усиления системы уменьшается в Kg раз, за счет включения в работу первого звена запаздывания 5 и второго усилителя 8. Это приводит к замедлению нарастания сигнала , l4iU/l Ka, На треть; д интервале времени за счет включения цеп1 чки запаздывания 6,9 общий коэффициент усиления по каналу ( уменьшается до величины К,/ -t-Kg K, в установивщемся режиме коэффициент усиления по каналу ( равен 1, К,/ U U, i, что обеспечивает устойчивость замкнутой системы и обработку выходного сигнала X с объекта. Динамику большинства объектов промыш- ленной технологии можно описать с помощью передаточной функции первого порядка с запаздыванием( / 1+Тр . При этом запаздывание может быть как в управлении (блок переменного запаздывания расположен перед инерционной частью объекта), так и в измерении (блок временного запаздывания расположен за инерционной частью объекта). Согласно теории оптимального управления объектами с запаздыванием по квадратичному критерию качества 00 (i))Q,RU (i)ldt, оптимальный закон управления имеет вид U(-fc)-CKQX(t)+K ja}+jK.{o,s)u(, где- X(i) - сигнал с выхода интегральной составляющей ПИ - регулятора, т.е. XJ(i) ХС) Квазиоптимальный закон управления, близкий к оптимальному (аппроксимация вторым порядком), имеет вид )()-к |x(t)(t-r/2)-K-Utt-T), Закон квазиоптимального управления с помощью членов K.,U(i-r/2) и K LfCt-T) 7о учитывает чистое запаздывание в . Параметры оптимального и квазиоптимального регулятора выч сляются из решения матричного алгебраического уравнения Риккати. При управлении объектами первого порядка в качестве регулятора 2 используются типовой ПИ-регулятор, а для объекта второго порядка с запаздыванием - ПИД-регулятор. В предлагаемой системе автоматического управления использован только сигнал, снятый до звена запаздывания (т.е. с выхода регулятора), что расширяет область практического применения изобретения, так как звенья запаздывания можно выполнять на апериодических звеньях с передаточной функцией / T /z-pti Кроме этого, использование последовательно соединенных звеньев запаздывания с суммарным запаздыванием, равным запаздыванию Б объекте управления, позволяет хранить и использовать информацию о предыдущем движении объекта в целях обеспе- чения более высокого качества регулирования. Это повышает запас устойчивости в замкнутой системе и уменьшает время переходного процесса. Формула изобретения Система автоматического регулирования для объектов с запаздыванием, содержащая элемент сравнения, выход которого связан со входом регулятора, и объект управления, dW J 1 Wy лью повышения точности работы и быстродействия системы регулирования, она содержит сумматор, первое и второе последовательно соединеннъш звенья запаздъшания, первый, второй и третий масштабирующие -I9 --I- v vA iij4i vxrA jfл/щкА усилители, при этом первый вход сумматора связан с выходом регулятора, а выход через первый масштабирующий усилитель - со входом объекта управления вход,первого звена запаздывания подсоединен к выходу сумматора, а выходы первгго и второго звеньев запаздывания соответственно через второй и третий масштабирующие усилители связаны со вторым и третьим входами сумматора. Источники информации, принятые во внимание при экспертизе:. 1.Эрриот П. Регулирование производственных процессов, изд-во Энергия, М., 1967 г., стр, 255, рис. 9-12, 9-13. 2. Труды I Международного конгресса международной федерации по автоматическому управлению. Теория непрерывных систем. J f rf j eirfi .lt.t JiJJJlf JTAV A i l-VJl Специальные математические проблемы. Издво Академии наук СССР, М., 1961 г., стр. 95-112, рис. 9. 3. Авторское свидетельство СССР № оО1оо9, кл. Gj О5 В 1V/OO, 11.12. 1969 г. 4. Авторское свидетельство СССР № 263016, кл. Q 05 В 17/02, 13.09. 1968 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования | 1985 |
|
SU1298711A1 |
| Прогнозирующий регулятор | 1986 |
|
SU1386958A1 |
| Автоматический регулятор | 1983 |
|
SU1120282A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2453890C1 |
| Система автоматического регулирования | 1988 |
|
SU1569802A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Следящая система | 1988 |
|
SU1529175A2 |
| ПНЕВМАТИЧЕСКИЙ КВАЗИОПТИМАЛЬНЫЙ РЕГУЛЯТОР | 1970 |
|
SU268768A1 |
