дом седьмого блока сравнения, выход экстраполятора - с вторым входом второго блока адаптации, выход первого сумматора - с первым входом первого блока сравнения, выход первого задатчика постоянной величины - с вторым входом третьего сумматора, выход второго задатчика постоянной величины - .с первым входом второго блока сравнения, выход третьего эадатчика постоянной величины - с первым входом третьего блока сравнения.
выход четвертого задатчика постоянной величины - с вторым входом восьмого блока сравнения, выход третьего блока адаптации - с дополнительным входом второго масштабирующего блока, выход генератора пробных сиг налов - с третьим входом второго сумматора, выходы первого, второго, третьего и четвертого фильтров низкой частоты - с вторыми входами соответственно первого,второго,третьего и девятого блоков сравнения.

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Регулятор | 1982 |
|
SU1037208A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |
| РЕГУЛЯТОР | 2011 |
|
RU2448354C1 |
| Система управления объектом с несколькими управляющими входами | 1985 |
|
SU1287105A1 |
| Адаптивная система управления агломерационной установкой | 1981 |
|
SU1125604A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
СИСТЕМА ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ, содержащая последовательно вкл}оченные первый cynoviaтор, второй сумматор, исполнительный орган, первый датчик и первый фильтр низкой частоты, причем выход исполнительного органа соединен с первым входом объекта управления, второй вход которого соединен через второй датчик с входом второго фильтра низкой частоты., первый выход объекта управления через третий датчик соединен с входом третьего фильтра низкой частоты, второй выход объекта управления через четвертый Датчик соединен с входом четвёртого фильтра низкой частоты, первый блок адаптации, соединенный выходом с дополнительным входом первого масштабирующего блока, второй блок адаптации, соединенный выходом с дополнительным входом экстраполятора, семь блоков сравнения, два блока задержки, второй и третий масштабирующие блоки, отличаю-; щ а И с я тем, что, с целью расширения функциональных возможностей, в нее введены четыре задатчика постоянных величин, пятый фильтр низкой частоты, восьмой блок сравнения, третий блок адаптации, генератор пробных сигналов, последовательно включенные четвёртый масштабирующий блок, девятый блок сравнения и ню стой фильтр низкой частоты, последовательно вклю ченные блок выделения модуля, третий сумматор, блок деления, интегратор и первый блок умножения, последовательно включенные сигнум-реле и второй блок умножения, причем выход девятого блока сравнения через последо вательно соединенные пятый и шестой блоки сравнения и второй блок умножения подсоединен к второму входу .блока деления, выход третьего блока i сравнения через последовательно соединенные второй масштабирукадий блок, W первый сумматор и первый блок задержки подключен к входу четвертого масштабирующего блока, выход первого блока сравнения через последовательно соединенные второй блок задержки, пятый фильтр низкой частоты И седьмой блок сравнения соединен с входом экстраполятрра и первыми входами, первого, второго и третьего to блоков адаптации, выход второго блоCD ка сравнения через первый масштабирующий . блок соединен с вторым входом первого сумматора и вторым входом первого блока адаптации, выход второго блока задержки подключен к первому входу четвертого блока сравнения, второй вход которого соединен с выходом пятого фильтра низкой частоты, а выход - с входами блока выделения модуля, сигнум-реле и вторым входом первого блока умножения, выход шестого фильтра низкой частоты соединен с вторым входом пятого блока сравнения, выход второго масштабирующего блока - с вторым входом третьего блока адаптации, выход интегратора через последовательно соединенные восьмой блок сравнения и третий масштабируквдий блок - с вторялм вхо
Изобретение относится к автоматическому управленияю и регулированию и может быть использовано для построения систем управления техническими объектами, которые описываются последовательным соединением звена с дрейфующей экстремальной характеристикой, инерционного звена первого порядка и звена чистого запаздывания и подвержены влиянию контролируемых и неконтролируемых внешних воздействий с нестационарными статическими свойствами.
Примером такого рода объектов являются объекты черной металлургии, если рассматривать задачу оптимизации относительных показателей расходов материалов и энергии, выхода высококачественной продукции, например удельного расхода кокса на доменной печи, выхода жидкой стали в сталеплавильном производстве. Статическую зависимость изменений отмеченных показателей в функции от управляу т.его воздействия можно представить в виде
AY(t) (t) - AU(t- Т) , (1) где AY(t) - изменения целевой выходной переменной объек та управления в момент времени t AD(t-T)- изменения управляющего
воздействия;
) - знакопеременный коэффициент J
f - время чистого запаздывания. Кроме того, рассматриваемые объек ты управления имеют косвенные выходные переменные, которые в отличие от целевых переменных не требуется оптимизировать.
Задача управления заключается в оптимизации выходной переменной объекта с экстремальной характеристикой .
Известна экстремальная система управления, включающая последовательно соединенные объект управления, инерционный блок, полосовой . , фильтр, формирукяцее устройство, фазовый детектор, низкочастотный фильтр и интегратор, выход которого подключен к одному входу объекта управления, к другому входу которого подключен выход генератора поисковых колебаний 11.
0 Недостатком этой системы является низкая точность отслеживания экстремума целевой выходной переменной вследствие наличия запаздывания и неконтролируемых возмущений,
5 а также из-за неучета в явном виде контролируемых внешних воздействий.
Наиболее близким по принципу построения к предлагаемой системе регулирования является прогнозирующий регулятор, содержащий последовательно включенные первый блок сравнения, ; первый фильтр низкой частоты,.обратную модель объекта без запаздывания, второй блок сравнения, третий блок сравнения, второй фильтр низкой частоты, первый экстраполятор, первый сумматор, исполнительный орган, третий фильтр низкой частоты и первый блок задержки, выход которого подключен к второму, входу второго блока сравнения, последовательно соеди- ненные четвертый фильтр низкой частоты, первый масштабирующий блок, второй блок задержки, подключенный своим выходом к второму входу третье
5 го блока сравнения, последовательно соединенные вторые экстраполяторы, четвертые блоки сравнения, вторые масштабирующие блоки, выходы которых подключены к входам второго
0 сумматора, входы вторых экстраполяторов соединены с выходом второго фильтра низкой частоты, а выход второго сумматора - с одним из входом первого сумматора, последовательс но соединенные пятый блок сравнения, инерционное звено первого порядка, третий масштабирующий блок, выход
которого соединен с одним из входов
второго блока суммирования, шестой блок сравнения, подключенный своими входами к выходу третьего фильтра низкой частоты и выходу первого . масштабирующего блока, который соединен также,с одним из входов первого сумматора, третьи блоки задержки, входы которых соединены с выходом шестого блока сравнения, выход последнего из третьих блоков задержки подключен к входу пятого блока сравнения, выходы остальных - к входам четвертых блоков сравнения,
за исключением первого из них, вход
которого соединен с выходом пятого блока сравнения, второй вход.пятого блока сравнения соединен с выходом третьего блока сравнения, пос ледовательно. включенные четвертые
блоки задерж.ки, седьмые блоки сравнения и первые блоки адаптации, выход первого из которых соединен с дополнительным входом первого экстраполятора, выходы остальных - с дополнительными входами вторых экстраполяторов, вторые входы седьмых блоков .сравнения соединены с выходом второго фильтра низкой частоты,вход первого из четвертых .блоков задержки - с выходом первого экстраполятора, входы остальных четвертых бло- . ков задержки - с выходами вторыхэкртраполяторов, выход первого блока задержки соединен также через восьмой блок сравнения и второй блок адаптации с дополнительным входом первого масштабирукадего блока, второй вход восьмого блока сравнения подключен к. выходу второго блока сравнения С2.
Недостаток известного прогнозирукяцего регулятора при его применении для рассматриваемого класса объекта с экстремальной характеристикой заключается в невозможности восстановления оценок идеальных управляющих воздействий, так как в явном виде отсутствует задание на выходную пе- . ременную объекта управления и коэффициент передачи канала регулирования имеет знакопеременный характер.
Целью изобретения является расширение функциональных возможностейcиcтe ы управления.
Поставленная цель достигается тем что в прогнозирующий регулятор, со-. держащий последовательно включенные первый .сумматор,. второй сумматор, исполнительный орган, первый датчик и первый фильтр низкой частоты,
причем выход исполнительного органа соединен с первым входом объекта управления, второй вход которого соединен через второй датчик с входом второго фильтра низкой частоты-, первый выход объекта управления через третий датчик соединен с входом
третьего фильтра низкой частоты, вта рой выход объекта управления через четвертый датчик соединен с входом . четвертого фильтра низкой частоты, первый блок адаптации, соединенный выходом с дополнительным входом первого масштабирующего блока второй блок адаптации, соединенный выходом с дополнительным входом экстраполятора, семь блоков сравнения,
0 два блока задержки, второй и трет.ий масштабирующие блоки, введены четыре, задатчика постоянных величин, пятый фильтр низкой частоты, восьмой блок сравнения, третий блок адаптации, генератор пробных сигналов, :
5 последовательно включенные четйертый масштабирующий блок, девятый блок сравнения и шестой фильтр низкой частоты , последовательно включенные блок выделения модуля,, третий сумматор, i
0 блок деления, интегратор и первый блок умножения, последовательно включенные сигнум-реле и второй блок умножения, причем выход девятого блока сравнения через последователь5но соединенные пятый и шестой блоки сравнения и второй блок умножения подсоединен к второму входу блока деления, выход третьего блока сравнения через последовательно соединен0ные второй масштабирующий блок, пер-, вый сумматор и первый блок задержки подключен к входу четвертого масштабирунвдего блока, выход первого блока сравнения через последовательно
5 соединенные второй-блок задержки, пятый фильтр низкой частоты и седьмой блок сравнения соединен с входом экстраполятора и первыми входами первого, второго и третьего блоков
0 адаптации, выход второго блока сравнения через первый масштабируюций блок соединен с вторым входом первого сумматора и .вторым входом первого блока адаптации, выход второго блока задержки подключен к первому входу
5 четвертого блока сравнения,, второй вход кото.рого соединен с выходом пятого фильтра низ-кой частоты, а выходс входами.блока выделения Модуля, сигнум-рел4 и вторым входом первого
0 блока умножения, выход шестого фильтра низкой частоты соединен- с вторым входом пятого блока сравнения, выход второго масштабирующего блока - с вторым входом третьего блока .адапта5ции, выход интегратора через послёдовательно соединенные восьмой блок сравнения и третий масштабирующий блок - с вторым входом- седьмого блока сравнения, выход экстраполятора 0с вторым Входом второго блока адаптации, выход первого сумматора - с . первым : вход омпервого блока сравне- ния, выход первого задатчика постоянной величины - с вторым входом тре- . тьего сумматора, выход второго задат5
чика постоянной величины - с первым входом второго блока сравнения, выход третьего задатчика постоянной величины - с первым входом третьего блока сравнения, выход четвертого задатчика постоянной величины с. вторым входом восьмого блока сравнения, выход третьего блока адаптации - с дополнительным входом второго масштабирующего блока, выход генератора пробных сигналов - с третьим входом второго сумматора, выходы первого, второго, третьего и четвертого фильтров низкой частоты - с вторыми входами соответственно первого, второго, третьего и девитого блоков сравнения.
Введение новых блоков и связей позволяет оперативно оценивать знакопеременный коэффициент передачи канала регулирования объекта управле ния с экстремальной характеристикой и в результате, определять с учетом контролируемого внешнего воздействия и косвенной выходной переменной управляющее воздействие, оптимизирующее с задаваемой точностью значение выходной целевой переменной
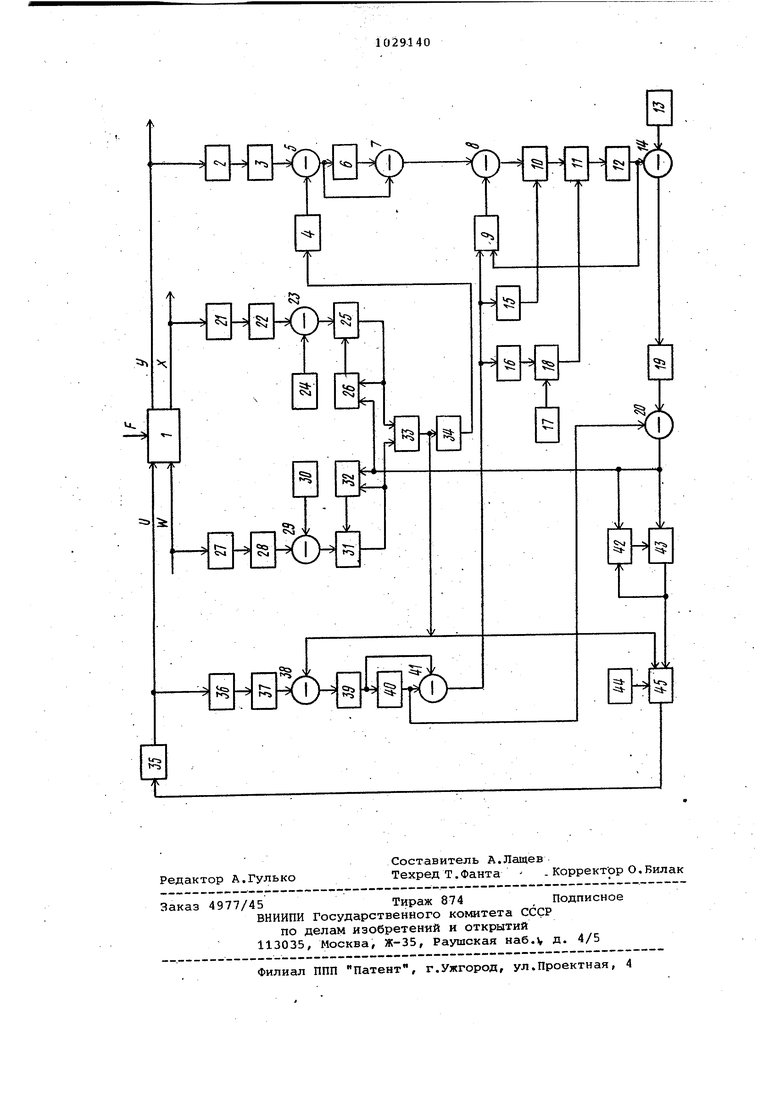
На чертеже приведена блоктсхема предлагаемой системы.
Система экстремального регулирования содержит объект 1 управления, четвертый датчик 2, четвертый фильтр 3 низкой частоты, четвертый масштабирующий блок 4, девятый блок 5 сравнения,шестой фильтр 6 низкой частоты, пятый блок 7 сравнения, шестой блок 8 сравнения, первый блок 9 умножения, второй блок 10 умножения, блок 11 деления, интегратор 12, четвертый задатчик13 постоянной величины, восьмой блок 14 сравнения, сигнум-реле 15, блок 16 выделения модуля, дервый задатчик 17 постоянной величины, третий сумматор 18, третий масштабирующий блок 19, седьмой блок 20 сравнения, третий датчик 21, третийфильтр 22 низкой частоты, третий блок 23 сравнения, третий задатчик 24 постоянной величины, второй масштабирующий блок 25, третий блок 26 адаптации, второй датчик 27, второй фильтр 2 низкой частоты, ВТОРОЙ блок 29 сравнения, второй задатчик 30 постоянной величины, первый масштабирую1ций блок 31, первый блок 32 адаптации, первый сумматор 33, первый блок 34 задержки, испол нительный орган 35, первый датчик 36, первый фильтр 37 низкой частоты, первый блок 38 сравнения, второй блок 39 задержки, пятый фильтр 4 низкой частоты, четвертый блок 41 сравнения, второй блок 42 адаптации экст)аполятор 43, генератор 44 пробч них сигналов, второй сумматор 45.
На чертеже обозначено: U - управляющее воздействие; W - контролируемое внешнее воздействие; F - неконт ролируемое внешнее воздействие; Y - целевая выходная переменная объекта управления; X - косвенная выходная переменная объекта управления.
Адаптивная система управления объектом с экстремальной характеристикой работает следующим образом.
Величина контролируемого внешнего воздействия W измеряется вторым датчиком 27 и полученный сигнал подается на второй фильтр 28 низкой частоты, где усредняется- на интервале времени, приблизительно равном удвоенному максимальному значению постоянной времени т „„инерции объекта
тел .
управления. Тем самым устраняются динамические свойства объекта управления и в дальнейшем производится статическая оптимизация. Сигнал об усредненном значении контролируемого возмущения с выхода второго филь.тра 28 низкой частоты подается на второй блок 29 сравнения, где из него вычитается сигнал о базовом, например среднем, значении W, поступающий с выхода второго задатчика 30 постоянной величины. Сигнал о приращении контролируемого возмущения в первом масштабирующем блоке 31 умножается на коэффициент и, как резуль тат, пересчитывается в масштаб управляющего воздействия U.
Аналогично сигналу о контролируемом внешнем воздействии W пересчиты вается в приращения управляющего воЗ действия и сигнал о косвенной выходной переменной X объекта управления. Для этих целей служат третий датчик 21, третий фильтр 22 низкой частоты, третий блок 23 сравнения, третий задатчик 24 постоянной величины и второй масштабирующий блок 25.
В первом сумматоре 33 алгебраически суммируются сигналы с выходов пер вого 31 и второго 25 масштабирующих блоков и в результате получается суммарная корректировка ЛИ управляющего воздействия в зависимости от приращений контролируемого внешнего воздействия и косвенной выходной переменной относительно их базовых значений, т.е. U(t) k(t)w(t) - kx(t)- xTt) - , (2) где (t) и kj(t) - адаптируемые
коэффициенты пересчета приращений соответственно контролируемого внешнего воздействия W и косвенной выходной переменной X относительно их базовых значений W и X в момент времени.t.
Величина управляющего воздействия и измеряется первым датчиком 36 ;и полученный сигнал подается на первйй фильтр 37 низкой частоты, где усредняется на интервале време-ни . Из выходного сигнала первого фильтра 37 низкой частоты в первом блоке 38 сравнения вычитается выходной сигнал ди(t) первого сумматора 33, вследствие чего из сигнала об усредненном значении U(t) исключаются эффекты изменения контроли.руемого внешнего воздействия и косвенной выходной переменной и получается значение приведенного управлякяцее воздействие (t), Выходной сигнал первого блока 38 сравнения задерживается во BTOPOI-I блоке 39 задержки на интервал времени чистого запаздывания Т и подается на пятый фильтр 40 низкой частоты, в котором выделяется текущее базовое (среднее ) значение приведенного управляющего воздействия, В четвертом блоке 41 сравнения из сигНсша об и t - Т) вычитается сигнал об его базовом значении и получается сигнал о приращении приведенного управления относительно его базового значения - .(t - т).. Величина выходной целевой перемен ной Y объекта 1 управления измеряетU P(e)-интервал времени интегрирования;-переменная интегрирования -постоянный коэффициент, S i gn fJ- сигнум-функция. Для реализации выражения (З) вых ной сигнал четвертого блока 41 срав нения о (t - -f) подается на входы, первого блока 9 умножения, сигнум-реле 15 и блока 16 выделения модуля. В первом блоке 9 умножения перемножаются сигнал о (t --с с- сигналом о ci-(t - т) , поступающим с выхода интегратора 12, Сигнал о полученном произведении вычитается в шестом блоке 8 сравнения из сигнала об (t) , идущего с выхода пятого б1лока 7 сравнения. Выходной сигнал шестого блока 8 сравнения умножается во втором блоке 10 умнож ния на сигнал о sign - т ) , который вырабатывается на выходе сигнум-реле 15. Выходной сигнал бло ка 16 выделения модуля суммируется в третьем сумматоре 1В с выходным сигналом тс задатчика 17 постоя нной
ся четвертым датчиком 2 и полученней сигнал подается на четвертый фильтр 3 низкой частоты, где усредняется на интервале времени 2Т, .
Сигнал о aU(t) с выхода первого
сумматора 33 задерживается в первом блоке 34 задержки и поступает на четвертый масштабирующий блок 4, в котором умножается на постоянный коэффициент, в результате чего пересчитывается в сигнал о приращении целевой выходной переменной в зависимости от л и(t) . Выходной сигнал четвертого масштабирующего блока 4 вычитается в девятом блоке 5 сравнения из выходного сигнала четвертого фильтра 3 низкой частоты. Из выходного сигнала девятого блока 5 сравнения в шестом фильтре б низкой частоты выделяется сигнал о текущем базовом (среднем } значении, который вычитается в пятом блоке 7 сравнения из выходного сигнала девятого блока 5 сравнения. На выходе пятого блока 7 сравнения получается сигнал о приращении приведенного целевого выходного сигнала дУ относительно его текущего базового значения. Блоки предлагаемой системы управления с 8 по 18 предназначеныдля текущего оценивания (адаптации ) знакопеременного коэффициента d канала регулирования, которое осуществляется по выражению 9-t)s cgnau (e--t) величинь. В блоке 11 деления выходной сигнал второго блока умножения 10 делится на выходной сигнал третьего сумматора 18 и полученный сиг.нал дается на интегратор 12 с постоянной времени интегрирования Т, на- выходе которого получается сигнал о текущем значении знакопеременного коэффициента ot(t - Т) . Из сигнала о величине cic( t - Т) в восьмом блоке 14 сравнения вычитается сигнал о заданном значении ot, поступающий с четвертого задатчика 13 и сигнал о полученной разности умножается на постояннный коэффициент в третьем масштабирующем блоке 19 и тем caivttsiM рассчитывается корректировка Л}(1 - С) управлякядего воздействия с целью получения .оценки идесшьного управлякядего воздействия. Сигнал о сЛи(1 - t) вычитается в седьмом блоке 20 сравнения из сигнала о текущем базовом значении управ ляющего воздействия с выхода пятого фильтра 40 низкой частоты и получается сигнал pj6 оценке идеальногчэ
управления - Т) при условии, что W и X находятся на базовом уровне. Сигнал о U(t - т) экстраполируется в экстраполяторе 43 на интервсш времени f и поступает на второй сумматор 45, где алгебраически суммируется с сигналом aU(t), поступающим с йыхода первого сумматора 33. Таким образом получается сигнал управляющего воздействия, пересчитанный на фактические значения W .и X. Кроме того, во втором сумматоре 45 подсуммируется еще выходной сигнал генератора 44 пробных сигнаяов например, двоичного типа с целью более эффективного оператив Lu te-tbk t6Mvw(e-c)(6-t;)
il (t)r .
л«
i-U
r (в-т)-|1(0)-лх()91.п лх (е-т)
1c/t.|
Г yfldXlQ-TM
t-t i«3(e) ui(e) - u, L - интервал времени интегри, рования, U - базовое значение оценки идеального управления j - постоянный коэффициент, 0 - переменная интегрирования Нестационарность статических хар Теристик неконтролируемых возмущений F учитывается с помощью второго оЧ| ( е ). где Uf(e) и (в)
ного оценивания коэффициента ct. Выходной сигнал второго сумматора 45 подается на вход исполнительного органа 35 для реализации управляющей команды.
Изменчивость характеристик объекта 1 управления по отношению к контролируемым, внешним воздействиям и косвенным выходным переменным парируется -путем адаптации пересчетных
коэффициентов k и kj в выражении (2), которая осуществляется с помощью первого 32 и-третьего 26 блоков адаптации. В них реализуется, в частности, процедура,. которую можно описать выражением
(4)
(e-c)l
(f) t 5 (e)3 0|- KU{e)dei Тф()-5 yejcie-d -- (8) тф(в)с30- у0)ав (е) - и(е) , (9) 45 соответственно входной и выходной сигЙ 1Л экстраполятора 3; постоянные величи- ны. блока 42 адаптации. При условии, что оператор экстраполятора 43 представлен в виде реального форсируюи1е.го звена о., w(p) - , (7) ТфР+1 f где t - интервал экстраполяции Т. - постоянная времени форсиругацего звена, во втором блоке 40 адаптации реализуется, например, процедура ; Применение предлагаемой адаптивной системы управления объектом с экстремальной характеристикой для управления мартеновскими печами позволяет, как показывают результаты имитационного моделирования, повысить главным образом производительность мартеновских печей примерно на 2,3%, что дает экономический эффект около 500 тыс. руб. I .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматизация производства и прогФашленная электроника | |||
| Т | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| М., Советская энциклопедия, 1965, с | |||
| Зажим для канатной тяги | 1919 |
|
SU358A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
