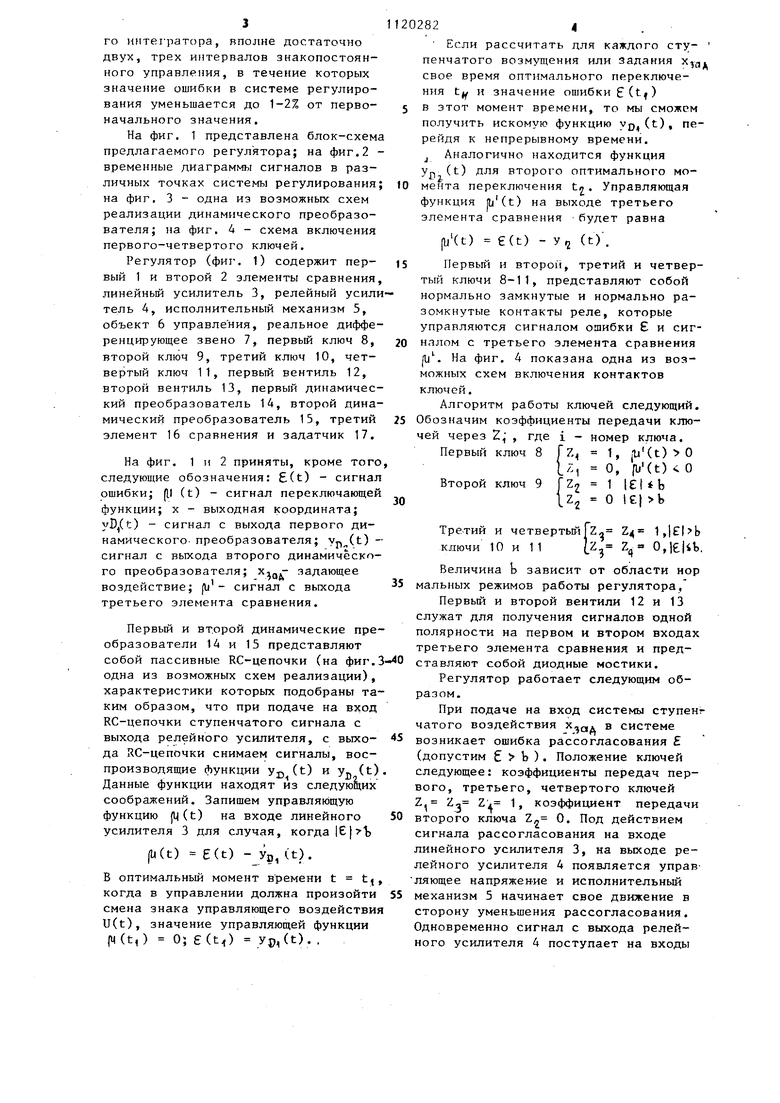
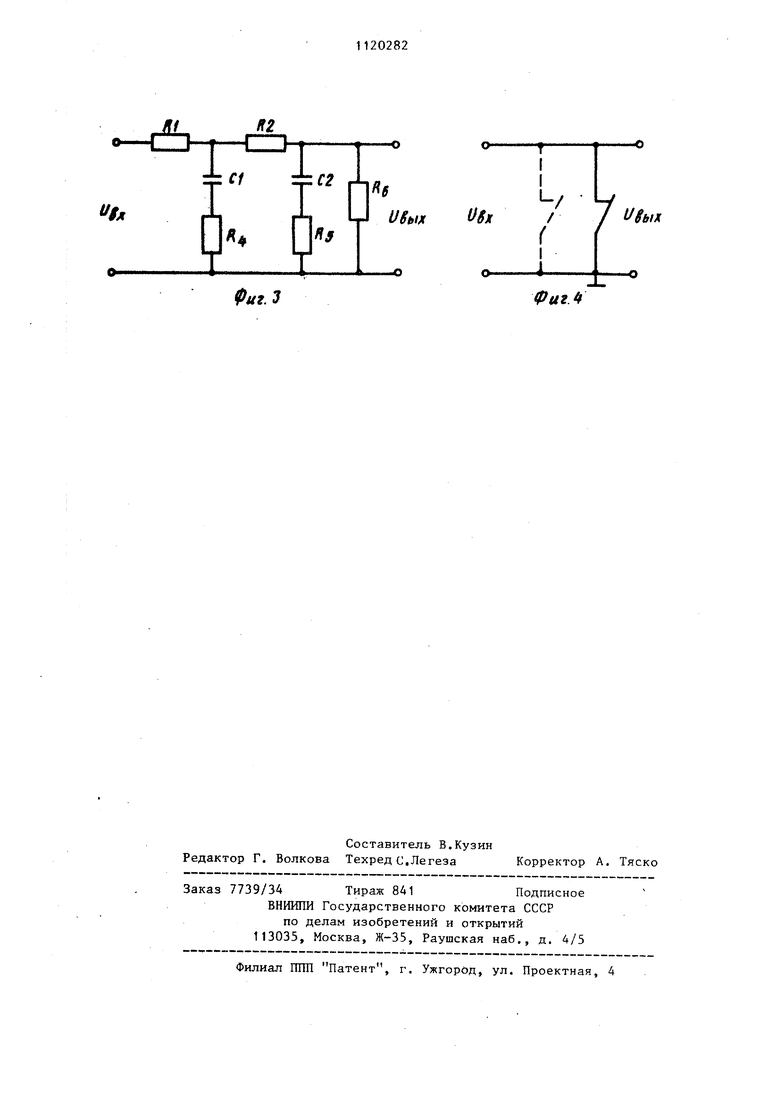
Изобретение относится к автоматическому управлению и может быть использов.ано при автоматизации телловых процессов химических и металлургических производств. Известны устройства для автоматического регулирования, содержащие по следовательно соединенные первый и второй элементы сравнения, релейный усилитель, исполнительный механизм, к выходу измерителя выходной координаты подключены последовательно соединенные линейный усилитель и диффе ренциатор, выход которого подсоедине к второму входу второго элемента сра нения, выход измерителя выходной координаты подключен к второму входу первого элемента.сравнения, к первом входу которого подключен задатчик выходной координаты lj . Недостатком таких устройств являе ся значительное перерегулирование и недостаточное быстродействие при сту пенчатом изменении задающего воздействий. Наиболее близким к предлагаемому является оптимальный релейный автома тический регулятор, содержащий после довательно соединенные первый и второй элементы сравнения, линейный усилитель, релейньй усилитель, испол нительный механизм, к выходу которого подключены параллельно соединенные реальное )еренцирующее звено и нелинейньп1 функциональный г реобраз нагель, своими выходами связанные с входами сумматора, выход которого соединен с вторым входом второго эле мента сравнения,задатчик и измеритель выходной координаты соединены с первым и вторым входами первого элемента сравнения zl . Недостатком известного регулятора является малое быстродействие при ступенчатом изменении задания на входе системы, так как с помощью нелинейного функционального преобразователя можно получить только одно оптимальное переключение управляющего воздействия. Цель изобретения - повышение быст родействия системы регулирования при отработке внешнего задания. Поставленная цель достигается тем, что автоматический регулятор содержащий задатчик, последовательно соединенные измеритель выходной коор динаты, первый и второй элементы t 22 сравнения, линейный усилитель, релейный усилитель, испол штельный механизм и реальное дифференцирующее звено, выход задатчика подключен к второму входу первого элемента сравнения, вход и выход объекта регу.пирования соотпетстпенно связаны с выходом исполнительного механизма и входом измерителя выходной коорди)аты, дополнительно содержит первый ключ, последовательно соединенн1)е первый динамический преобразователь и второй ключ, последовательно соединенные первый вентиль, второй динамический П1)еобразователь и третий ключ, последовательно соединенные второй вентиль, четвертый ключ и третий элемент сравнения, подключенный вторым входом к выходу третьего ключа, а выходом - к управляющему входу второго ключа, выход первого элемента сравнения соединен с входом второго вентиля и с управляющими входами пер-вого третьего и четвертого ключей, выходы первого и второго ключей соединены соответственно с вторым и третьим входами второго элемента сравнения, выход релейного усилителя подключен к входам первого вентиля и первого динамического преобразователя . Объект управления состоит из последовательно соединенных инерционных звеньев. Принцип регулирования заключается в следующем: при быстром изменении задающего воздействия и при больших значениях ощибки|Е| Ь/Ь значение ошибки в системе, при котором происходит переключение управляющего воздействия и определяется в основном областью нормальных режимов регулятора и характером воз 1ущаюищх воздействий на систему, регулятор в режиме постоянной скорости на знакопостоянных интервалах управляющего воздействия осуществляет квазиоптимальный по быстродействию переходный процесс, когда значение ошибки регулятор в скользящем режиме отрабатывает и удерживает значение ошибки в системе регулирования равное нулю. Для строго оптимального по быстродействию управления в линейной системе п-го порядка необходимо осуществить п интервалов знакопостоянного управления. Однако для линейных систе до четвертого порядка, состоящего из инерционных звеньев и одного интегратора, вполне достаточно двух, трех интервалов знакопостоянного управления, в течение которых значение ошибки в системе регулирования уменьшается до 1-2% от первоначального значения. На фиг, 1 представлена блок-схема предлагаемого регулятора; на фиг.2 временные диаграммы сигналов в различных точках системы регулирования на фиг. 3 - одна из возможных схем реализации динамического преобразователя; на фиг. 4 - схема включения первого-четвертого ключей. Регулятор (фиг. 1) содержит первый 1 и второй 2 элементы сравнения, линейный усилитель 3, релейный усили тель 4, исполнительный механизм 5, объект 6 управления, реальное дифференцирующее звено 7, первый ключ 8, второй ключ 9, третий ключ 10, четвертый ключ 11, первый вентиль 12, второй вентиль 13, первый динамический преобразователь 14, второй динамический преобразователь 15, третий элемент 16 сравнения и задатчик 17, На фиг. 1 и 2 приняты, кроме того следующие обозначения: (t) - сигнал ошибки; (II (t) - сигнал переключающей функции; X - выходная координата; yD/t) - сигнал с выхода первого динамического- преобразователя; ) - сигнал с выхода второго динамического преобразователя; задающее воздействие; (u- сигнал с выхода третьего элемента сравнения. Первый и второй динамические пре образователи 14 и 15 представляют собой пассивные RC-цепочки (на фиг. одна из возможных схем реализации). характеристики которых подобраны та ким образом, что при подаче на вход RC-цепочки ступенчатого сигнала с выхода релейного усилителя, с вькода RC-цепочки снимаем сигналы, воспроизводящие функции yj5 (t) и Yj, (t) Данные функции находят из следующих соображений. Запишем управляющую функцию (4(t) на входе линейного усилителя 3 для случая, когда IE)) fU(t) E(t) , (t). В оптимальный момент времени t t когда в управлении должна произойти смена знака управляющего воздействи lJ(t), значение управляющей функции |Ч (t ) 0; (t) ). , Если рассчитать для каждого ступенчатого возмущения или задания х свое время оптимального переключения t, и значение ошибки (t) в этот момент времени, то мы сможем получить искомую функцию y0(t), перейдя к непрерывному времени. J Аналогично находится функция Уп (t) для второго оптимального момента переключения tn. Управляющая функция |Li(t) на выходе третьего элемента сравнения будет равна (t) e(t) - у (t). Первый и второй, третий и четвертый ключи 8-11, представляют собой нормально замкнутые и нормально разомкнутые контакты реле, которые управляются сигналом ошибки и сигнллом с третьего элемента сравнения jli. На фиг. 4 показана одна из возможных схем включения контактов ключей. Алгоритм работы ключей следующий. Обозначим коэффициенты передачи ключей через Z, , где i - номер ключа. fZ, 1, jt. (t)0 Первый ключ 8 tz, О, fb (t) vO Zj 1 lei tb Второй ключ 9 0 ie| b Третий и четвертый rZo i 1, -- z. o,ie|4b. ключи 10 и 11 Величина Ь зависит от области нор мальных режимов работы регулятора/ Первый и второй вентили 12 и 13 служат для получения сигналов одной полярности на первом и втором входах третьего элемента сравнения и представляют собой диодные мостики, Регулятор работает следующим образом. При подаче на вход системы ступенг чатого воздействия в системе возникает ошибка рассогласования (допустим b). Положение ключей следующее: коэффициенты передач первого, третьего, четвертого ключей Z Zo 7.f 1, коэффициент передачи второго ключа Z. 0. Под действием сигнала рассогласования на входе линейного усилителя 3, на выходе релейного усилителя 4 появляется управляющее напряжение и исполнительный механизм 5 начинает свое движение в сторону уменьшения рассогласования. Одновременно сигнал с выхода релейного усилителя 4 поступает на входы динамических преобразователей. В результате этого на выходе динамичес ких прэобразователей и соответственно на выходе первого 8 и третьего 10 ключей появятся сигналы ур (t), (фиг. 2), определяемые передаточными функциями RC-цепочек. Точность аппро ксимации данных функций RC-цепочками составляет 1-2%, Если для квазиоптимального управления достаточно получить только два интервала знакопостоянного управления (когда объект управления вместе с исполнительным механизмом описывается дифференциальным уравнением вто рого порядка, или в конце второго интервала управления ( (t)| Ь| , то коэффициент передачи второго динамического преобразователя равен нулю, При трехинтервальном управлении коэффициенты передач первого и второго динамических преобразователей отличны от нуля, в момент времени t, (фиг. 2), ког; а сигнал ошибки (t; и сигнал y.(t) с выхода первого динамического преобразователя станут равными, произойдет переброс релейного усилителя, следовательно изменится управ ляющее воздействие и начнется второй интервал управления, так как при t t с t (l)(t) E(t) - Это следует из того, что инерцион ность динамического преобразователя не меньше, чем инерционность объекта управления. В момент времени сигнал ошибки (tj) и сигнал yp(t) с выхода второго динамического преобразователя 15 станут равными, сработает первый ключ 8 и коэффициент передачи станет равным Z 0. Начнется третий интервал управления, так как при t| (u(t) :0;Уо, (t) 0| |U(t) (t) 0. Когда сигнал ошибки станет мень ше Ь , произойдет переброс второго четвертого ключей и коэффициенты передач этих ключей станут равными 7.А 0. На второй элемент 2 сравнения поступает только сигнал с реального дифференцирующего звена 7 параметры которого определяются из условия устойчивости минимального отклонения ошибки системы Е(t) в режиме стабилизации. Переходный процесс отработки задающего воздействия закончен. Если при подаче на вход системы регулирования ступенчатого воздействия в системе возникает ошибка рассогласования )С1 b , то регулятор работает следующим образом: передаточные функции первого, третьего и четвертого ключей Z Z Z i второго ключа . вход второ- го элемента 2 сравнения вместе с сигналом ошибки (t) поступает сигнал с реального дифференцирующего звена 7. Таким образом, в скользящем рейсиме регулятор обеспечивает устойчивый переходной процесс при отработ ке заданного воздействия. В случае необходимости, на первс интервале управления можно изменять величину задающего воздействия, не дожидаясь когда система отработает предьщущее значение, в этом случае переходный процесс также будет квазиоптимальным по быстродействию. При других возмущениях система устойчива в работе и обеспечивает близкие к оптимальным переходные процессы. Таким образом, предлагаемое изобретение при больших значениях задания или возмущающего воздействия реализует квазиоптимальное о быстродействию трехинтервальное управление, что по сравнению с известным регулятором увеличивает быстродействие системы и отличается простотой вводимых блоков по сравнению с известным нелинейным функциональным преобразователем.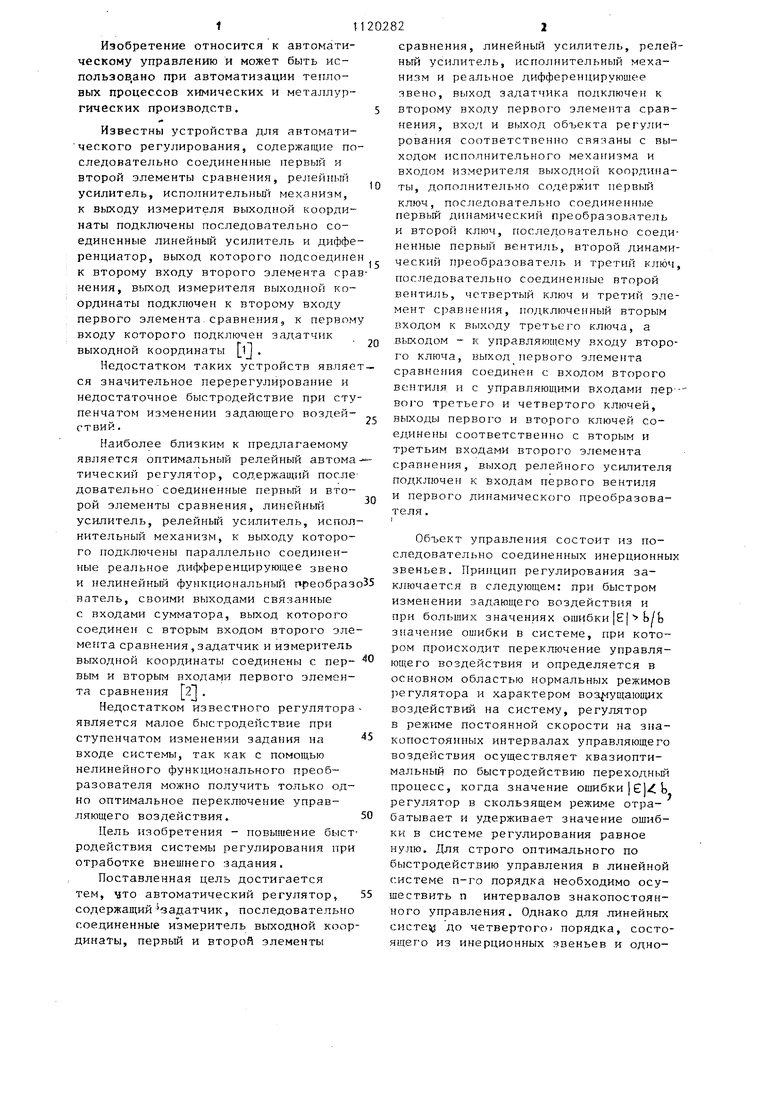
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| СПОСОБ РОВЕНСКОГО ДЛЯ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ВЕНТИЛЬНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1986 |
|
SU1833094A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Система управления | 1977 |
|
SU741231A1 |
| СПОСОБ РОВЕНСКОГО ДЛЯ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ВЕНТИЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 1990 |
|
RU2109396C1 |
| Силовой следящий привод | 1987 |
|
SU1425598A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| Регулятор относительного обжатия прокатываемой полосы | 1981 |
|
SU944696A1 |
| Устройство для управления инерционным объектом | 1977 |
|
SU744449A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР, содержащий задатчик, последовательно соединенныеизмеритель выходной координаты, первый и второй элементы сравнения, линейный усилитель, релейный усилитель, исполнительный механизм и реальное дифференцирующее звено, выход задатчика подключен к второму входу первого элемента сравнения, вход и выход объекта регулирования соответственно связаны с выходом исполнительного механизма и входом измерителя выходной координаты, отличающийся тем, что, с целью повьппения быстродействия системы регулирования при отработке внешнего задания, он содержит первый ключ, последовательно соединенные первый динамический преобразователь и второй ключ, последовательно соединенные первый вентиль, второй динамический преобразователь и трети ключ, последовательно соединенные второй вентиль, четвертый ключ и третий элемент сравнения, подключенньй вторые входом к выходу третьего ключа, а вьЕходом - к управляющему входу (Л второго ключа, выход первого элемента сравнения соединен с входом второго вентиля и с управляющими входами первого, третьего и четвертого ключей, выходы первого и второго ключей соединены соответственно с вторым и третьим входами второго элемента ьо сравнения, выход релейного усилителя э подключен к входам первого вентиля N5 00 tsO и первого динамического преобразователя.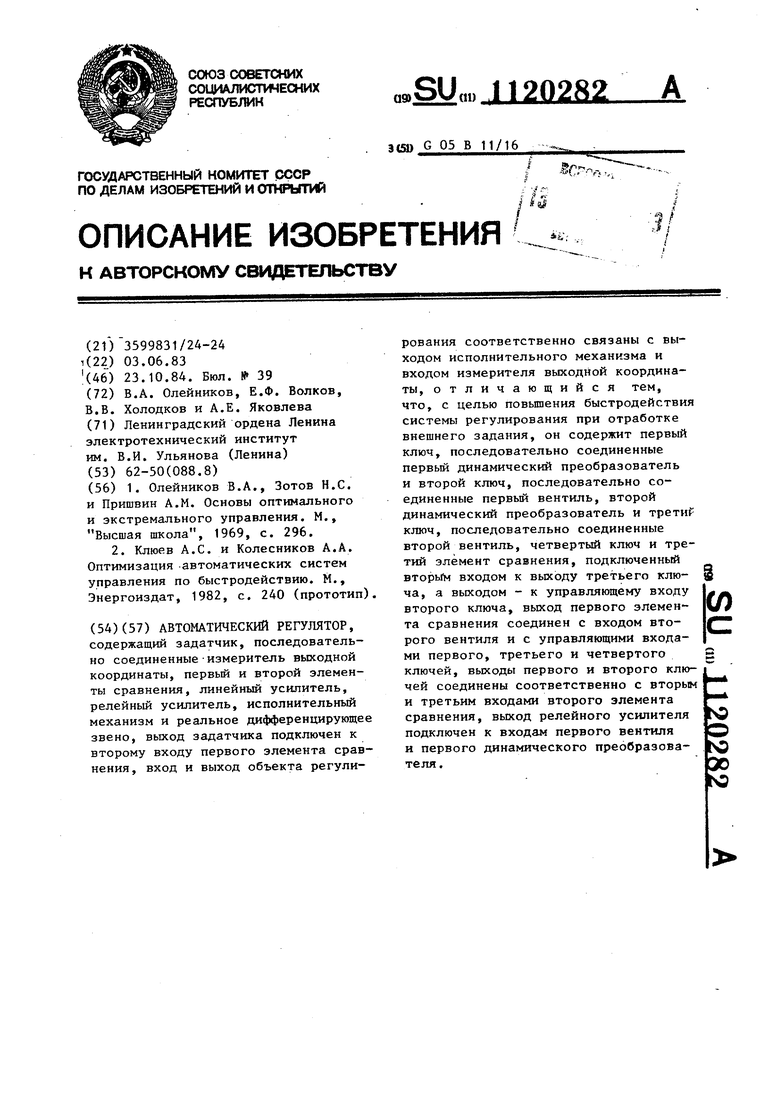
Фи9
/Г
±:Cf
/д
к, Пя.
Фиг.З
ФигЛ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Олейников В.Д., Зотов Н.С | |||
| и Пришвин A.M | |||
| Основы оптимального и экстремального управления | |||
| М., Высшая школа, 1969, с | |||
| ДЖИНО-ПРЯДИЛЬНАЯ МАШИНА | 1920 |
|
SU296A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Клюев А.С | |||
| и Колесников А.А | |||
| Оптимизация автоматических систем управления по быстродействию | |||
| М., Энергоиздат, 1982, с | |||
| Русская печь | 1919 |
|
SU240A1 |
