Изобретение относится к области автоматизации производственных процессов, в частности к области пневматических регуляторов.
Известен пневматический регулятор с пропорционально- интегрально-дифференциальным законом регулирования, включающий в себя полупропорциональное звено. В таком регуляторе в качестве неотъемлемого составного элемента используется блок для дифференцирования выходного параметра объекта регулирования, так как в прохгышленных системах автоматизации бывает невозможно получить путем дифференцирования регулируелюй величины ее производную вследствие большей инерционности объекта, наличия относительно высокочастотной помехи в объекте или датчике, ограниченности постоянной времени реального дифференцирующего блока. Другим нринципиальным несоверщенством известного регулятора является ненрерывный характер изменения его управляющего воздействия, в то время как оптимальный закон регулирования должен иметь релейный переключательный характер.
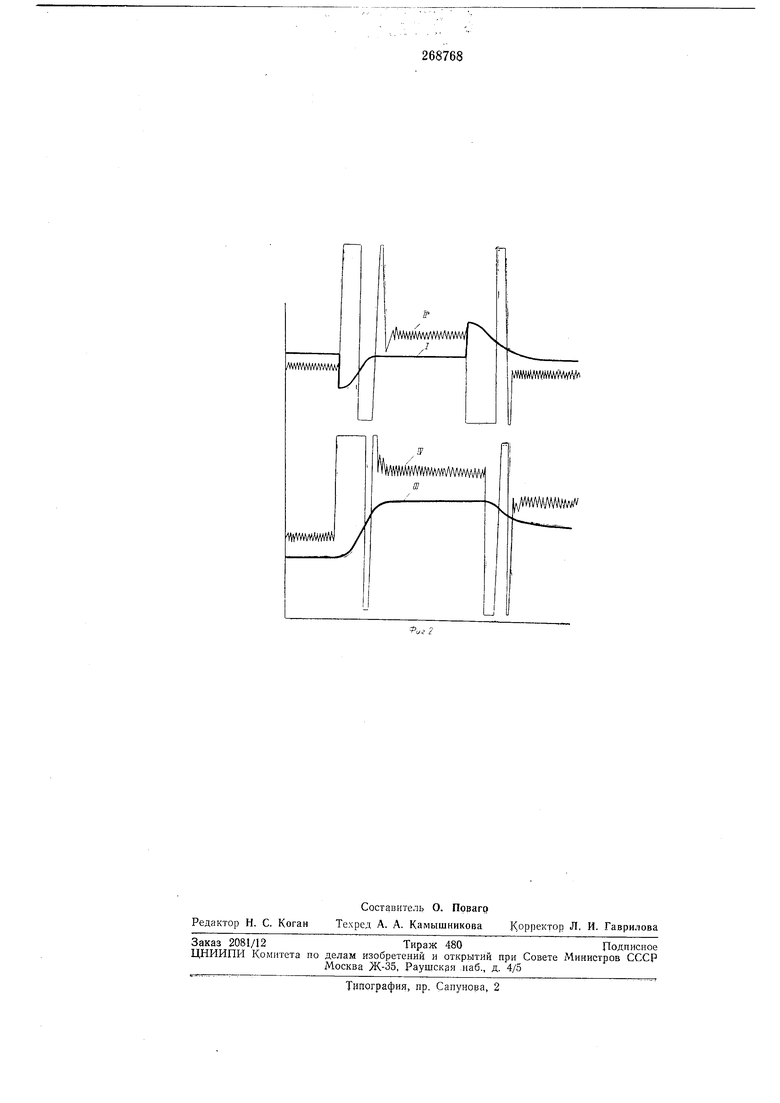
Предлагаемый пневматический квазиоптимальный регулятор выпол 1ен на элементе сравнения, выход которого соединен через апериодическое звено со своей входной отрицательной камерой и через другое апериодическое звено с нервои входной отрицательной камерой первого cy aтopa, выход которого соединен со входной положительной камерой элемента сравнения и через переменный дроссель - со своей входной положительной камерой, соединенной через постоянный дроссель со второй входной положительной камерой и с выходом второго сумматора, входная положительная камера которого через динамическое звено соединена с нервои входной отрицательной камерой первого сумматора, а выход элемента сравнения соединен через апериодическое звено с выходным усилителем. Такое выполнение регулятора позволяет улучщить качество регулирования, уменьшить динамическую и статическую ошибки, сократить длительность процесса регулирования. Использование предлагаемого регулятора облегчает автоматизацию трудноуправляемых объектов регулирования с большим запаздыванием и большой инерционностью. При автоматизации объектов, имеющих несколько промежуточных контролируемых параметров по каналу, входное воздействие - основная регулируемая величина. Применение предлагаемого квазионтимального регулятора позволяет уменьшить колнчсство датчиков в системе автоматического регулирования и сократить в связи с этим объем монтаж1ю-наладочных раНа фиг. 1 представлена принципиальная схема предлагаемого пневматического квазиопти,1алыюго регулятора; на фиг. 2 - диаграмма работы регулятора, где / - график регулирования при компенсации ступенчатого возмущающего воздействия; // - выходной сигнал регулятора при компенсацнн ступенчатого возмупдающего воздействия; /// - график регулирования при обработке ступенчатого изменения задания; IV - выходной сигнал регулятора при обработке ступенчатого изменения задания. Выход сумматора / соединен со входной положительной камерой элемента сравнения 2 и через переменный дроссель 3 - со своей входной положительной камерой, которая, в свою очередь, соединена через постоянный дроссель 4 с другой входной положительной камерой и с выходом сумматора 5. Выходная отрицательная камера сумматора 1 соединена с выходом апериодического звена и со входом динамического звена 7, выход которого соединен со входной ноложительной камерой сумматора 5. Вход апериодического звена 6 соединен со входной отрицательной камерой элемента сравнения 2 и выходом апериодического звепа 8, вход которого соединен с выходом элемента сравнения 2 и со входом апериодического звена 9. Выход апериодического звена 9 соединен с выходным усилителем мощности 10, выходное давление которого является управляющим воздействием регулятора. Каждое из апериодических звеньев нредетавляет собой последовательное содеинение перемеппого дросселя, емкости и повторителя. Динамическое звено состоит из последовательно соединенных анериодических звеньев 11 и 12 и звена 13 чистого запаздывания. Динамическое звено 7, апериодические звенья 5 и и переменный дроссель 3 настраиваются в соответствии с динамической характеристикой объекта управления. Апериодическое звено 9 настраивается таким образом, чтобы сгладить нульсации давления, поступающие с выхода элемента сравнения 2, в режиме стабилизации регулируемого параметра вблизи состояния равновесия, которые возникают вследствие переключательного характера закона регулирования. Регулятор работает следующим образом. При повыщении давления задания увеличивается давление на выходе сумматора 5 и сумматора ./. Вследствие этого выходной сигнал элемента сравнения 2 принимает максимальное значение, равное величине давления питания. Начинает увеличиваться давление на выходе анериодических звеньев 5 и б и динамического звена 7, причем на выходе звена 8 давление растет быстрее, чем на выходе звена 6, которое, в свою очередь, растет быстрее, чем На выходе звена 7. Г1овып1епие давления на выходе звена 6 уменьшает давление в положительной входной камере элемента сравнения 2, а увеличение давления на выходе звена 8 увеличивает давление в отрицательной входной камере эле.мента сравнения. Таким образом, рассогласование давлений во входных камерах элеме1гга сравнения, вызванное изменением величины задания, устраняется, и через fieKOTOpoe время выходной сигнал элемента сравнения перебрасывается в противоположную сторону. Давление на его выходе становится равным пулю или какомулибо другому давлению, условно принимаемому за нулевое. Вследствие этого давление на выходе апериодического звена 8 начинает падать, в то время как на выходе апериодического звена 6 и динамического звена 7 оно еще продолжает расти. Когда достигается определенное соотношение между давлениями на выходе апериодических звеньев 5 и S и динамического звена 7, установленное настройкой переменного дросселя 3, происходит второе преобразование выходного сигнала элемента сравнения 2. После этого давления на выходе звеньев 6-8 устанавливаются одинаковыми, нроцесс регулирования практически завершается, и система нриходит в состояние равновесия. При этом на выходе элемента сравнения появляется пульсирующий сигнал, среднее значение которого соответствует новому состоянию равновесия. Пульсации давления на выходе элемента сравнения 2, являющегося релейным элементом, сглаживаются апериодическим звеном 9 и выходным усилителем мощности 10. Аналогичным образом работает регулятор при уменьшении величины задания или при компенсации внешнего возмущающего воздействия. Графики работы регулятора с объектом регулирования третьего порядка с самовыравни,ванием приведены на фиг. 2. Графики I VI П показывают соответственно изменение регулируемой величины и выходной сигнал регулятора при компенсации ступенчатого возмущающего воздействия, приложенного к выходу объекта регулирования; графики /// и /У - изменение регулируемой величины и выходной сигнал регулятора при обработке ступенчатого изменения задания в большую и меньшую сторону. Процессы регулирования завершаются практически за два переключеиия (три интервала постоянства управляющего воздействия), что свидетельствует о близости закона регулирования к оптимальному по быстродействию. Предмет изобретения Пневматический квазиоптимальный регулятор, содержащий элемент сравнения, сумматоры, дроссели, усилитель, динамическое и апериодические звенья, отличающийся тем, что, с целью повышения быстродействия и улучшения качества регулирования многоемкостных объектов и объектов с запаздыванием, в нем
риодическое звено со своей входной отрицательной камерой и через другое апериодическое звено с первой входной отрицательной камерой нервого сумматора, выход которого соединен со входной ноложительной камерой элемента сравнения и через переменный дроссель - со своей входной положительной камерой, соединенной через постоянный дроссель со второй входной положительной камерой этого же элемента сравнения и с выходом второго сумматора, входная положительная камера которого через динамическое звено, состоящее из последовательно соединенных апериодических звеньев и звена запаздывания, соединена с первой входной отрицательной камерой первого сумматора, а выход элемента сравнения соединен через апериодическое звено с выходным усилителем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО КОМПЕНСАЦИИ ЗАПАЗДЫВАНИЯ | 1971 |
|
SU301689A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1977 |
|
SU742872A1 |
| Пневматическое управляющее устройство | 1976 |
|
SU684509A1 |
| Пневматический адаптивный регулятор | 1977 |
|
SU656022A1 |
| Пневматический регулятор | 1978 |
|
SU926616A1 |
| Пневматическое устройство компенсациизАпАздыВАНия | 1975 |
|
SU805255A2 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ПОЛУПОСТОЯННО РАБОТАЮЩИЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ (ПИД) РЕГУЛЯТОР | 2021 |
|
RU2768105C1 |
| Самонастраивающаяся система регулирования | 1969 |
|
SU530657A3 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ПОЛУПОСТОЯННО РАБОТАЮЩИЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ (ПИ) РЕГУЛЯТОР | 2021 |
|
RU2773233C1 |
| ПНЕВМАТИЧЕСКИЙ ГЕНЕРАТОР | 1972 |
|
SU323763A1 |

Г3 -2 э
MWMWMV/
iMWAWvVVWMVW
/т
-WiVWWW
