стружке, при этом сработает формирователь сброса 7 и устанавливает все регистры в исходное состояние, выход третьего регистра подключается ко входу четвертого регистра, а его вход - к формирователю команд 5.
На задатчике 4 устанавливается значение толщины стружки в сантиметрах. Машинист производит нуск привода хода машины. Если направление перемешения совпадает с направлением предыдуш,его перемещения, то блок компенсации 8 ошибки кинематического звена не разрывает цепь питания лампочки освещения датчика перемещения машины 1.
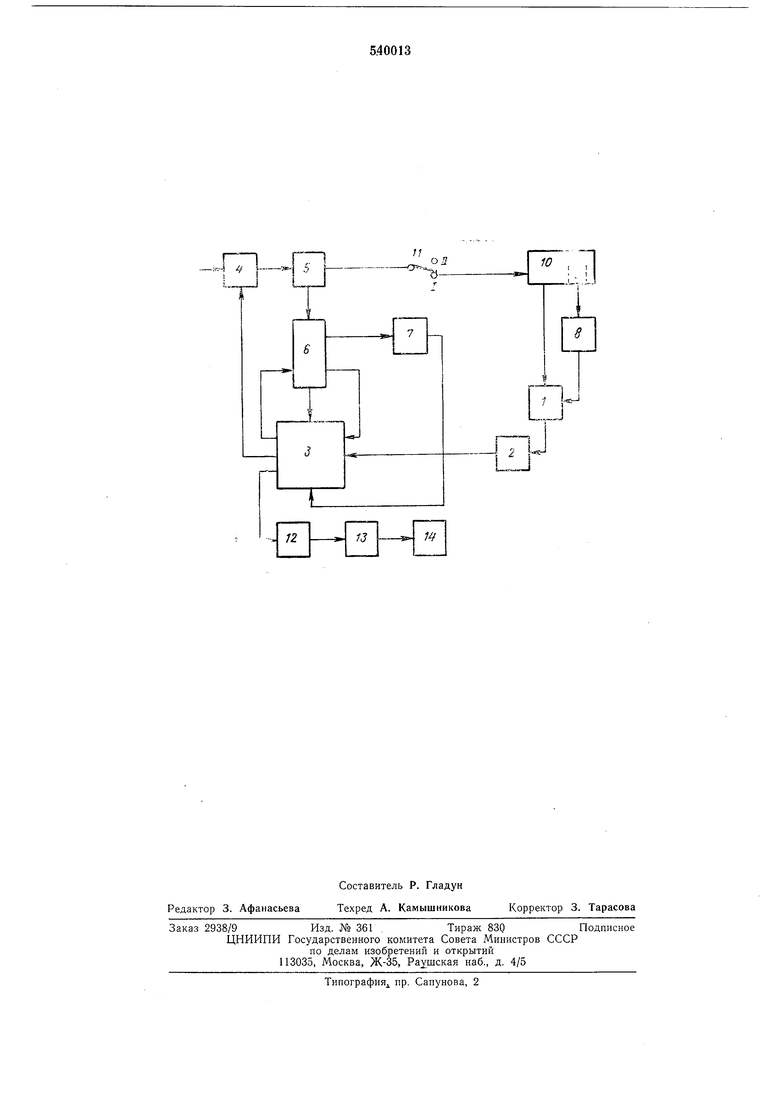
Датчик 1, связанный с одним из валов редуктора механизма хода, преобразует изменение угла поворота этого вала в последовательность электрических сигналов, которая преобразуется формирователем сигнала 2 в последовательность запускающих импульсов первого регистра блока счетчика 3. Первый регистр обеспечивает счет до 9, а десятый импульс, поступающий на его вход, сбрасывает регистр в исходное положение и записывает единицу во второй регистр.
С кодовых шин этих регистров информация о текущем значении перемещения поступает на дещифратор 12 и через электронные ключи 13-на цИ|фроБой индикатор 14. Кроме этого, информация поступает на схему сравнения 4 и в момент, когда значение приращения перемещения совпадает с установкой, на выходе схемы сравнения образуется нулевой потенциал, который и обуславливает срабатывание формирователя команд 5. Выходное реле этого формирователя разрывает цепь питания промежуточного реле, замыкающий контакт которого включен последовательно с педалью хода, перемещение машины прекращается, контакты выходного реле, кроме того, формируют импульс сброса, поступающий на шины сброса счетчика величины перемещения {первый и второй регистры) через переключатель вида работы 6, и импульс записи «1 в счетчик количества стружек (третий и четвертый регистр), и отключает питание лампочки фотодатчика.
Устройство готово к отработке следующего перемещения. Нажатием кнопки «Нуск, которая разблокировывает выходное реле формирователя команд 5, и педали «Ход машинист запускает привод хода. Экскаватор перемещается еще на толщину стружки и т. д. В счетчике количества стружек хранится порядковый номер отрабатываемой в данный момент стружки.
По окончании отработки первого слоя машинист на задатчике 4 устанавливает величину необходимого отъезда в десятичной системе исчисления, переключатель 6 вида работы переводит в положение «к слою. При этом срабатывает формирователь сброса 7 и все регистры переходят в исходное состояние.
Вход третьего регистра подключается к выходу второго, образуя вместе с первым счетчик величины перемещения с максимальным числом 999, а вход четвертого - к выходу формирователя команд 5.
Машинист переводит универсальный переключатель 9 в положение «назад и запускает привод. Блок компенсации ошибки кинематического звена размыкает цепь питания лампочки датчика перемещения машины 1 на
время, заданное в схеме регулируемой задержки импульса этого блока. По истечении этого времени сигналы с датчика начинают поступать на формирователь сигнала. Далее устройство работает как и при переходе к
стружке.
Устройство имеет два режима работы: автоматическую дозировку, тумблер 11 режима работы в положении I. Устройство работает, как описано выше.
Индикация перемещения. Тумблер 11 режима работы в положении П. Устройство работает аналогично, но не выключает привод управляемого механизма. Эту функцию выполняет машинист.
Формула изобретения
Устройство дозированной подачи роторного экскаватора, включающее датчик перемещения машины, формирователь команд, блок
счетчика, электронные ключи, дешифраторы, задатчик, схему сравнення, цифровой индикатор и переключатель вида работ, отличающееся тем, что, с целью повышения точности измерения и отработки величины
перемещения, оно снабжено формирователем сброса и блоком компенсации ошибки кинематического звена, вход которого связан с переключателем направления хода, а выход-с датчиком перемещения машины, при
этом выход формирователя сброса соединен с цепями сброса регистров блока счетчика, а вход подключен к переключателю вида работы.
--1 ГГ
Н гН 5
ц .1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дозированной подачи поворота роторной стрелы экскаватора | 1977 |
|
SU747941A1 |
| Устройство дозированной подачи роторного экскаватора | 1987 |
|
SU1532662A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ УВАЛА ТКАНИ НА СУКНОВАЛЬНОЙ МАШИНЕ | 1992 |
|
RU2027809C1 |
| Система автоматического управления строительно-дорожными и землеройно-транспортными машинами | 1991 |
|
SU1813144A3 |
| Устройство для испытаний датчиков давления | 1983 |
|
SU1129624A1 |
| Загрузочное устройство | 1988 |
|
SU1678572A2 |
| СИСТЕМА КОНТРОЛЯ РАБОТЫ РАСПРЕДЕЛИТЕЛЯ ШИХТЫ ДОМЕННОЙ ПЕЧИ | 1998 |
|
RU2126056C1 |
| Устройство для управления фотоколориметрическим газоанализатором | 1982 |
|
SU1092468A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| Позиционный дискретный электропривод | 1985 |
|
SU1352474A1 |
,
Lh
-ыI I J
