Изобретение относится к автоматизации управления роторным экска- в;атором или машиной подобного типа. Целью изобретения является повышение точности отработки слоев раз- Личных сортов полезного ископаемого и расширение функциональных возможностей .
На фиг.1 показана функциональная 4хема устройства; на фиг.2 - функ- йиональная схема блока определения направления перемещения;на фиг.З - Временные диаграммы работы блока определения направления перемещения. Устройство дозированной подачи Ьоторного экскаватора содержит датчик 1 приращения перемещения ,бло к 2 определения направления перемещения , блок 3 регулируемого масштабирования, задатчик 4 величины пере- йещения, счетчик 5 приращения пере- ещения, блок 6 сравнения, блок 7 компенсации ошибки кинематического звена, формирователь 8 команд, привод 9, счетчик 10 величины суммарного перемещения, цифровой индикатор 11.
Устройство работает следующим образом.
На задатчике 4 и блоке 7 компен- |сации ошибки кинематического звена устанавливаются соответствующие значения требуемой величины разового перемещения и ошибки кинематического звена по результатам предыдущей работы привода. В зависимости от првода экскаватора выбирается коэффициент деления блока 3 регулируемого масштабирования.
При включении питания команда Пуск отсутствует, состояние формирователя 8 команд не определено. Првод выключен. Обнуляется счетчик 10 величины суммарного перемещения.
Машинист производит пуск привода перемещения роторной стрелы экскаватора.
По команде Пуск значение разового перемещения (толщины стружки) с задатчика 4 заносится в счетчик 5, а формирователь 8 команд устанавливается в состояние, соответствующее перемещению роторной стрелы в заданном направлении. Включается привод 9 перемещения роторной стрелы экскаватора, роторная стрела начинает перемещаться, и с датчика 1 приращения перемещения на блок 2
определения направления перемещения начинают поступать импульсы, число которых пропорционально величине
перемещения. В зависимости от направления перемещения роторной стрелы импульсы проходят на один из первых двух выходов блока 2. С третьего выхода блока 2 суммарное число им0 пульсов поступает на блок 3 регулируемого масштабирования, где производится деление импульсов на заданное число. СГблока 3 регулируемого масштабирования импульсы поступа5 ют на вычитающий вход счетчика 5 приращения перемещения.
В момент совпадения кодов счетчика 5 приращения перемещения и блока 7 компенсации ошибок кинематического
Q звена блок 6 сравнения формирует сигнал, переводящий формирователь 8 команд в состояние, соответствующее отключенному приводу. Двигатель обесточивается. Роторная стрела после
5 выбега привода останавливается. После этого включение электродвигателя возможно только после повторной команды Пуск.
Одновременно с работой привода в
0 зависимости от направления перемещения импульсы с блока 2 определения направления перемещения поступают на вычитающий или суммирующий вход счетчика 10 величины суммарного перемещес ния, на синхронизирующий вход которого подаются импульсы с блока 3 регулируемого масштабирования, изменяя его состояние. Состояние счетчика отображается на индикаторе 11.
0 Блок 2 определения направления перемещения предназначен для распознавания направления перемещения и переключения импульсов трехканаль- ного датчика соответственно на один
5 из двух выходов Вверх или Вниз, а также суммирования импульсов датчика по третьему выходу.
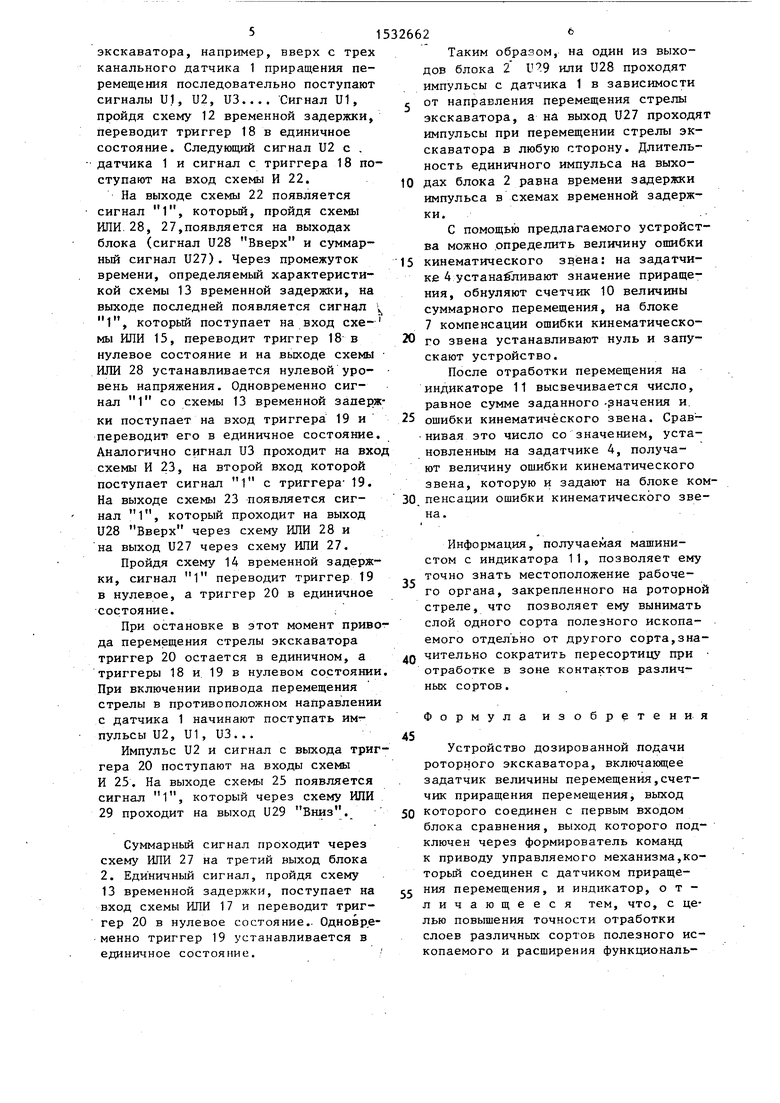
Блок 2 (фиг.2) состоит из трех схем 12, 13, 14 временной задержки, Q трех схем ИЛИ 15, 16, 17, трех триггеров 18, 19, 20, шести схем И 21-26 и трех схем ИЛИ 27, 28, 29. Блок 2 работает следующим образом.
При подаче питания на устройство дозированной подачи роторного экскаватора триггеры 18, 19 и 20 в блоке 2 устанавливаются в нулевое состояние. При перемещении стрелы
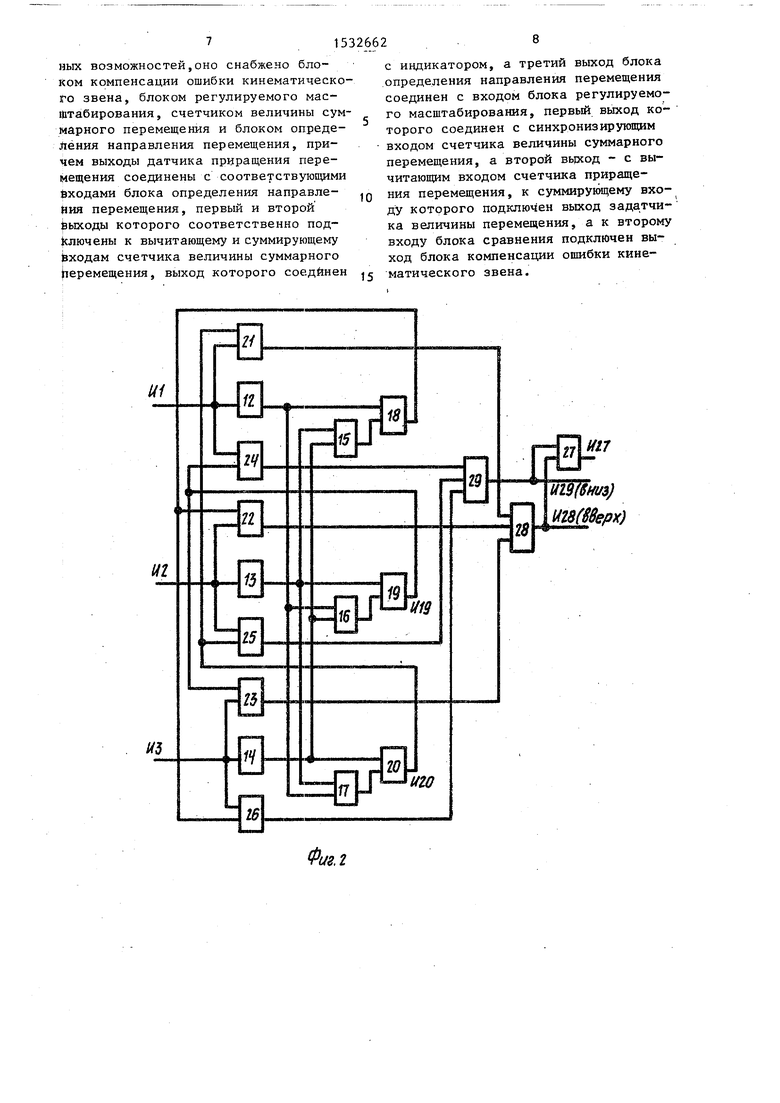
экскаватора, например, вверх с трех канального датчика 1 приращения перемещения последовательно поступают
сигналы U1, U2, U3 Сигнал U1,
пройдя схему 12 временной задержки, переводит триггер 18 в единичное состояние. Следующий сигнал U2 с . датчика 1 и сигнал с триггера 18 поступают на вход схемы И 22.
На выходе схемы 22 появляется сигнал 1, который, пройдя схемы ИЛИ 28, 27,появляется на выходах блока (сигнал U28 Вверх и суммарный сигнал U27). Через промежуток времени, определяемый характеристикой схемы 13 временной задержки, на выходе последней появляется сигнал 1, который поступает на вход схе- мы ИЛИ 15, переводит триггер 18 в нулевое состояние и на выходе схемы ИЛИ 28 устанавливается нулевой уровень напряжения. Одновременно сигнал 1 со схемы 13 временной задержки поступает на вход триггера 19 и переводит его в единичное состояние. Аналогично сигнал U3 проходит на вхо схемы И 23, на второй вход которой поступает сигнал 1 с триггера 19. На выходе схемы 23 появляется сигнал 1, который проходит на выход U28 Вверх через схему ИЛИ 28 и на выход U27 через схему ИЛИ 27.
Пройдя схему 14 временной задержки, сигнал 1 переводит триггер 19 в нулевое, а триггер 20 в единичное состояние.
При остановке в этот момент привода перемещения стрелы экскаватора триггер 20 остается в единичном, а триггеры 18 и 19 в нулевом состоянии При включении привода перемещения стрелы в противоположном направлении с датчика 1 начинают поступать импульсы U2, U1, U3...
Импульс U2 и сигнал с выхода триггера 20 поступают на входы схемы И 25. На выходе схемы 25 появляется сигнал 1, который через схему ИЛИ 29 проходит на выход U29 Вниз.
Суммарный сигнал проходит через схему ИЛИ 27 на третий выход блока 2. Единичный сигнал, пройдя схему 13 временной задержки, поступает на вход схемы ИЛИ 17 и переводит триггер 20 в нулевое состояние. Одновременно триггер 19 устанавливается в единичное состояние.
Таким образом, на один из выходов блока 2 или U28 проходят импульсы с датчика 1 в зависимости
от направления перемещения стрелы экскаватора, а на выход U27 проходят импульсы при перемещении стрелы экскаватора в любую сторону. Длительность единичного импульса на выхо0 дах блока 2 равна времени задержки импульса в схемах временной задержки.
С помощью предлагаемого устройства можно определить величину ошибки
5 кинематического звена: на задатчи- ке 4 устанавливают значение приращения, обнуляют счетчик 10 величины суммарного перемещения, на блоке 7 компенсации ошибки кинематическо0 го звена устанавливают нуль и запускают устройство.
После отработки перемещения на индикаторе 11 высвечивается число, равное сумме заданного -значения и
5 ошибки кинематического звена. Сравнивая это число со значением, установленным на задатчике 4, получают величину ошибки кинематического звена, которую и задают на блоке ком0. пенсации ошибки кинематического звена.
Информация, получаемая машинистом с индикатора 11, позволяет ему точно знать местоположение рабочего органа, закрепленного на роторной стреле, что позволяет ему вынимать слой одного сорта полезного ископаемого отдельно от другого сорта,значительно сократить пересортицу при отработке в зоне контактов различных сортов.
Формула изобретения
Устройство дозированной подачи роторного экскаватора, включающее задатчик величины перемещения,счетчик приращения перемещения, выход
которого соединен с первым входом блока сравнения, выход которого подключен через формирователь команд к приводу управляемого механизма,который соединен с датчиком приращения перемещения, и индикатор, отличающееся тем, что, с целью повышения точности отработки слоев различных сортов полезного ископаемого и расширения функциональ-
ных возможностей,оно снабжено блоком компенсации ошибки кинематического звена, блоком регулируемого масштабирования, счетчиком величины суммарного перемещения и блоком определения направления перемещения, причем выходы датчика приращения перемещения соединены с соответствующими йходами блока определения направления перемещения, первый и второй выходы которого соответственно подключены к вычитающему и суммирующему входам счетчика величины суммарного перемещения, выход которого соединен
5
с индикатором, а третий выход блока определения направления перемещения соединен с входом блока регулируемого масштабирования, первый выход которого соединен с синхронизирующим входом счетчика величины суммарного перемещения, а второй выход - с вычитающим входом счетчика приращения перемещения, к суммирующему входу которого подключен выход задатчи- ка величины перемещения, а к второму входу блока сравнения подключен выход блока компенсации ошибки кинематического звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дозированной подачи поворота роторной стрелы экскаватора | 1977 |
|
SU747941A1 |
| Устройство дозированной подачи роторного экскаватора | 1973 |
|
SU540013A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |
| Устройство управления механизмом подачи рабочего органа роторного экскаватора | 1983 |
|
SU1093759A1 |
| Устройство для определения положения экскавационной машины в пространстве | 1980 |
|
SU937622A1 |
| Устройство для автоматического управления процессом копания роторного экскаватора | 1986 |
|
SU1421828A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| Весодозировочное устройство для роторных экскаваторов | 1991 |
|
SU1816969A1 |
| Устройство для управления фотоколориметрическим газоанализатором | 1982 |
|
SU1092468A1 |
Изобретение относится к автоматизации управления роторным экскаватором. Цель изобретения - повышение точности обработки слоев различных сортов полезного ископаемого и расширение функциональных возможностей. Устройство состоит из датчика 1 приращения перемещения, блока 2 определения направления перемещения, блока 3 регулируемого масштабирования, задатчика 4 величины перемещения, счетчика 5 приращения перемещения, схемы сравнения 6, блока 7 компенсации ошибки кинематического звена, формирователя 8 команд, привода 9, счетчика 10 величины суммарного перемещения, цифрового индикатора 11. На задатчике 4 и блоке 7 устанавливают соответствующие значения требуемой величины перемещения и ошибки кинематического звена. В зависимости от привода экскаватора выбирают коэффициент деления блока 3. По команде "Пуск" значение разового перемещения с задатчика 4 заносятся в счетчик 5, формирователь 8 дает команду перемещения в заданном направлении. Привод 9 включается, импульсы с датчика 1 поступают на блок 2. В зависимости от направления вращения сигналы с блока 2 поступают на суммирующий или вычитающий входы счетчика 10, а затем на индикатор 11. С третьего выхода блока 2 импульсы через блок 3 поступают на вычитающий вход счетчика 5. В момент совпадения кодов счетчика 5 и блока 7 схема 6 формирует сигнал останова. 3 ил.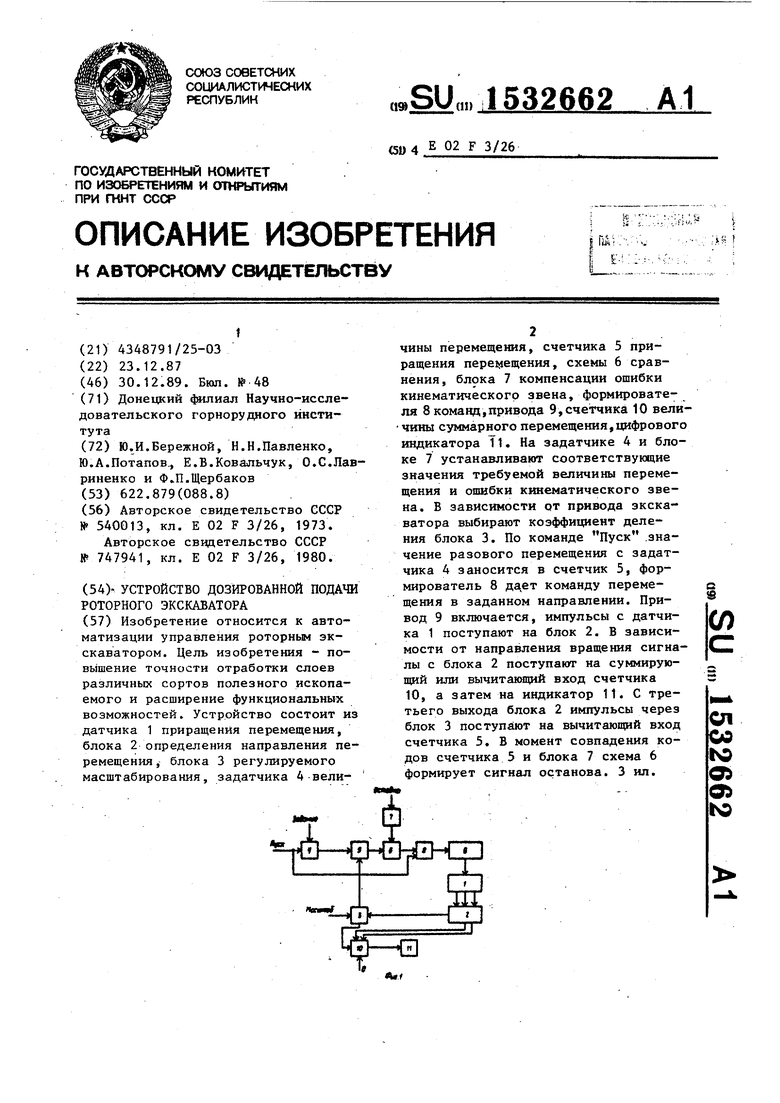
ИЩниз) №(88ерх)
А. 5
| Устройство дозированной подачи роторного экскаватора | 1973 |
|
SU540013A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство дозированной подачи поворота роторной стрелы экскаватора | 1977 |
|
SU747941A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
