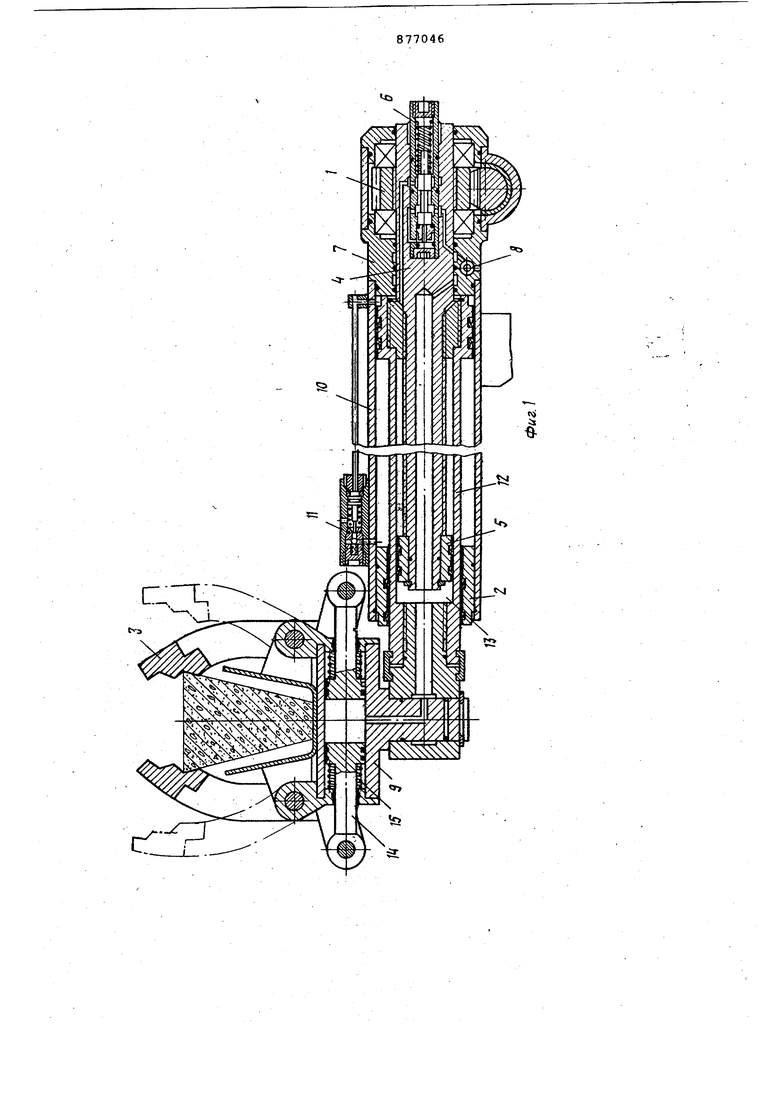
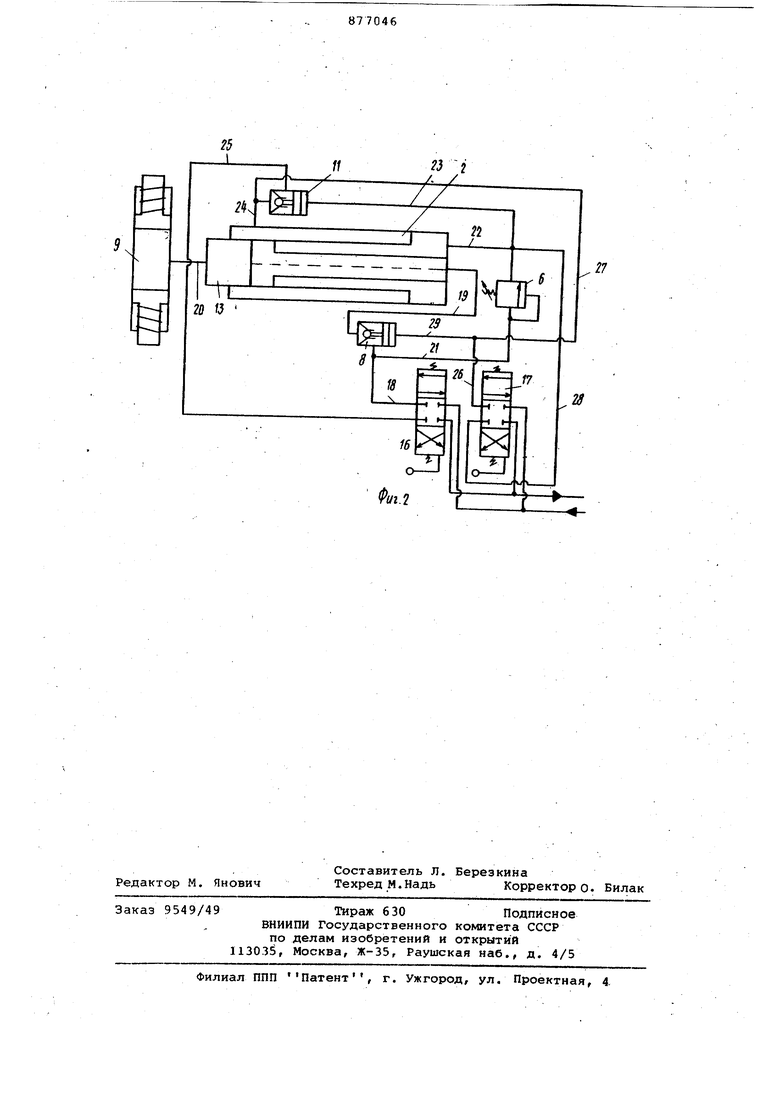
1 , Изобретение относится к средствам механизации установки крепи в горизонтальных и наклонных горных выработках при проведении их проходческими комбайнами, а именно к манипуляторам для установки элементов креп Известен манипулятор для установки элементов крепи, включающий стрелу, захват, домкрат зажима, гиДровинтовые домкраты, домкрат поворота, коллекторы и систему трубопроводов 1 Недостатком известного манипулятора является отсутствие домкрата перемещения, то исключает возможность продольного перемещения захвата относительно стрелы, а также нали чие внешних трубопроводов питания домкратов зажима и поворота. Наиболее близким к предлагаемому является манипулятор для установки элементов крепи, включающий механизм поворота, на валу которого установле домкрат перемещения, и захват с гидрозамком 2 . Недостатком такого манипулятора является частый выход из строя гидравлических рукавов домкрата захвата что снижает надежность и безопасност работы установки. , Цель изобретения - повышение надежности и безопасности работы манипулятора. Указанная цель достигается тем, что вал механизма поворота снабжен поршнем и переливным клапаном, а домкрат перемещения - управляегллм обратным клапаном. На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - гидравлическая схема. Манипулятор состоит из механизма 1, домкрата 2 перемещения и захвата 3 с гидрозамком. Механизм поворота 1 представляет собой вал 4, на одном конце которого закреплен поршень 5, а на другом в расточке установлен переливной клапан 6. В корпусе, 7 механизма поворота встроен гидравлический замок 8 гидродомкрата 9 захвата3. Домкрат 2 перемещения включает в себя трубу 10, управляемый обратный клапан 11 и полый поршень-шток 12, внутрення часть .которого образует с поршнем 5 поршневую полость 13. На штоках 14 гидродомкрата 9 установлены пружины 15 обратного хода. Управление манипулятором осуществляется от золотников 16
И 1.7 по каналам 18-29 подвода и отвода рабочей жидкости.
Назначение поршня 5, с одной стороны, обеспечивать продольное перемещение захвата 3, с другой стороны герметизируя в домкрате перемещения 2 поршневую полость 13 от штоковой, . поршень 5 способствует при включени домкрата 2 перемещения на вьщвижку посредством золотника 17 созданию в поршневой полости 13 свободного объема, без чего невозможно раскрытие захвата.
Управление домкратом 2 перемещения осуществляется периодически двумя золотниками 16 и 17. При выдвижке домкрата 2 перемещения включается золотник 16, и роль управляемого обратного клапана 11 при этом - соединить штоковую полость домкрата по каналам 24 и 25 и через золотник 16 со сливной магистралью.
При сокращении домкрата перемещеHHHv включается золотник 17 и задача клапана 11 в этом случае.- не допустить прохода.рабочей жидкости по каналам 23, 28 и золотнику 17 непосредственно на слив.
Переливной клапан 6 исключает предевременную выдвижку домкрата перемещения 2 до того, как будет захватом 3 зажат элемент крепи с опреде.ленным заданным усилием.
Манипулятор работает следующим образом.
Рабочая жидкость от золотника 16 через канал 18 поступает в гидравлический замок 8, откуда по каналу 19, внутренние полости вала 4, поршеньшток 12 и каналу 20 подается в домкрат 9, обеспечивая зажатие захватом 3 элемента крепи. По мере увеличения усилия зажатия до заданной величины происходит срабатывание соединенного каналом 21с каналом 18 переливного клапана 6 и рабочая жидкость по каналу 22 подается в поршневую полость домкрата 2 перемещения, а по каналу 23 - к обратному управляемому клапану 11, который соединяет через себя штоковую полость по,каналам 24 и 25 со сливом, давая возможность домкрату 2 перемещения выдвигаться.
Для сокращения домкрата 2 перемещения рабочая жидкость от золотника
17 по каналам 26,27 и 24 подается в штоковую полость, а по каналам 22 и 28 соединяется со сливрм, одновременно рабочая жидкость подается по каналу 29 на гидрозамок 8, открывая его и соединяя поршневую полость 13 через каналы 19,21,28 и переливной клапан 6 со сливом. При поршневойПОЛОСТИ 13 впериод сокращения домкрата 2 перемещения все время поддерживается давление, на которое настроен переливной клапан 6, чем обеспечивается сохранение усилия зажатия захватом 3.
В том случае, когда необходимо раскрыть захват 3, рабочую жидкость от золотника 17 по канаЛам 28 и 22 подают в пораневую полость домкрата 2 перемещения, за счет выдвижки которого в поршневой полости 13 образуется свободный объем, в который по |КаНалу 20 пружинами обратного хода 15 рабочая жидкость вьщавливается из домкрата 9, давая возможность оаскоытию захвата 3.
Исключение из конструкции манипулятора гидравлических рукавов для подвода рабочей жидкости к домкрату 9 захвата 3 повышает надежность и безопасность его работы, ликвидирует простой на замену рукавов.
Формула изобретения
Манипулятор для установки элементов крепи, включающий механизм поворота, на валу которого установлен домкрат перемещения и захват с гидрозамком, о тли ч ающий с я тем, что, с целью повьпаения надежности и безопасности работы манипулятора, ва механизма поворота снабжен поршнем и переливным клапаном, а домкрат перемещения - управляемым обратным кла.паном.
Источники информации, принятые во внимание при экспертизе
1.Михайлов Ю.М. и Кантович Л.И. Горные машины и комплексы. М., Недра , 1975, с. 219-220.
2.Авторское свидетельство СССР № 548717, кл. Е 21 D 11/02, 1974. (прототип). 23 г
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема управления секцией механизированной крепи | 1987 |
|
SU1509542A1 |
| Устройство для прямолинейного перемещения базы крепи | 1975 |
|
SU575427A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДОЛИНСКОГО МКД, СИСТЕМА УПРАВЛЕНИЯ КРЕПЬЮ, МЕЖСЕКЦИОННАЯ ЗАТЯЖКА КРЕПИ, ГИДРОСИСТЕМА КРЕПИ | 1999 |
|
RU2181842C2 |
| Захват манипулятора | 1980 |
|
SU929295A1 |
| АГРЕГАТ ФРОНТАЛЬНЫЙ ДОЛИНСКОГО АФД, ИСПОЛНИТЕЛЬНЫЙ ОРГАН (ВАРИАНТЫ), ЦЕПЬ КОЛЬЦЕВАЯ, СТАВ АГРЕГАТА, МЕХАНИЗМ РЕГУЛИРОВАНИЯ ПО ГИПСОМЕТРИИ, СЕКЦИИ КРЕПИ, ПЕРЕКРЫТИЕ, КРЕПЬ ВАНДРУТНАЯ, ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ, ПЕРЕГРУЖАТЕЛЬ (ВАРИАНТЫ), ГИДРОДВИГАТЕЛЬ ДЛЯ ЭМУЛЬСИИ, СРЕДСТВО УПРАВЛЕНИЯ, СРЕДСТВО КОНТРОЛЯ ГРАНИЦЫ "УГОЛЬ-ПОРОДА", СПОСОБЫ МОНТАЖА И САМОМОНТАЖА | 1996 |
|
RU2114996C1 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| Выносная опора грузоподъемной машины | 1990 |
|
SU1736909A1 |
| Механизированная крепь | 1981 |
|
SU964177A1 |
| Устройство для прямолинейного перемещения базы крепи | 1975 |
|
SU654804A1 |
| Устройство для управления гидравлической крепью | 1974 |
|
SU726345A1 |