1
Изобретение относится к технологическому оборудованию для изготоапения электрических машин и может быть использовано в электротехнической промышленности. .
Известен намоточный станок для укладу ки провода непосредственно в пазы магнитопровода статора, содержащий трубчатый привод, механизм фиксации статора и механизм натяжения проводаTil.
Недостатком известного станка является то, что поводок совершает возвратнопоступательное движение вдоль паза и ка|чательное движение в плоскостях, параллельиых торцу магнитопровода в крайних 1точках поступательного движения, в результате чего во время намотки в течение каждого цикла происходит значительное колебание скорости подачи провода через поводок. Скорость подачи провода в некоторые мгновения цикла бывает даже отрицательной, т. е, требуется обратное продергивание провода через поводок, что, в свою очередь, создает тяжелый режим работы для натяжного устройства, снижает скорост я качество намотки.
Известен и другой станок для намотки в паз, содержащий проводоукладчик, взаимодействующий с проводом через бесконе ную цепь, к одному из звеньев которой прикреплен поводок 2 .
Такой станок позволяет получить траекторию движения поводка, состоящую из двух прямых участков и двух полуокружностей, что, в свою очередь, позволяет при правильном подборе геометрических размеров траектори сгладить колебание скорости подачи провода, исключить из цикла участки с отрицательной скоростью подачи провода и, в конечном счете, повьгсить скорость и качество намотки.
Недостатком этого станка является неизменность траектории движения поводка и невозможность создания траектории с длиной прямого участка меньше,; чем диаметр звездочек.
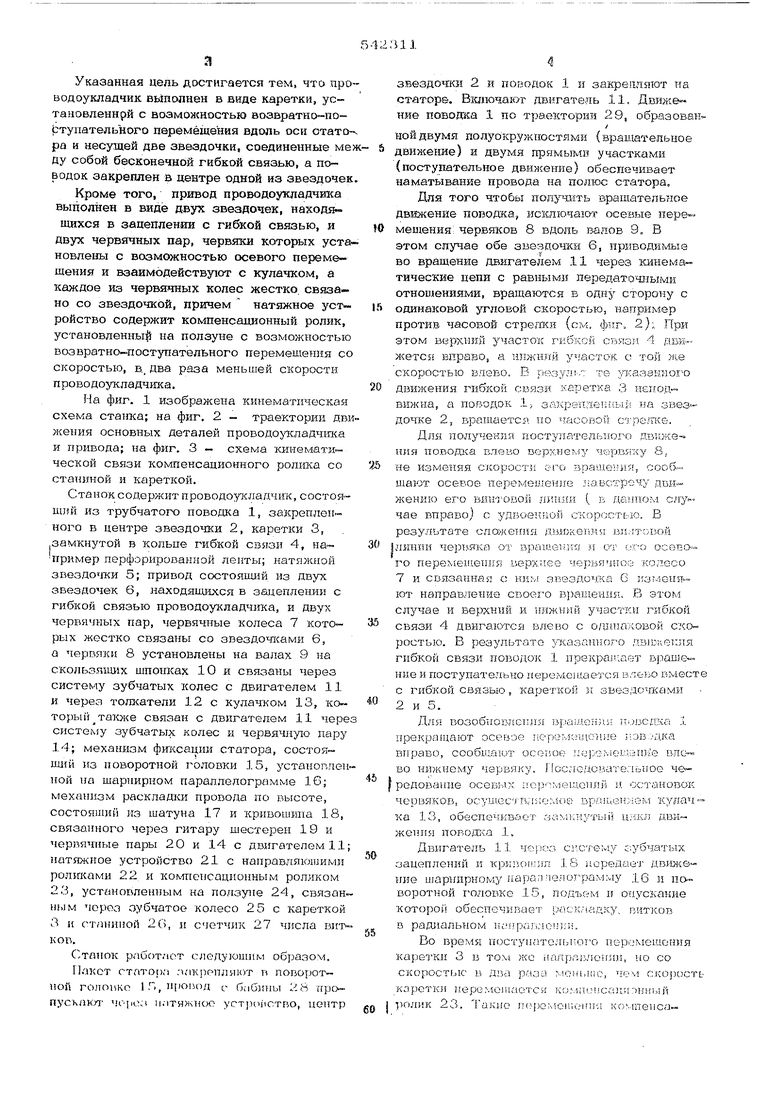
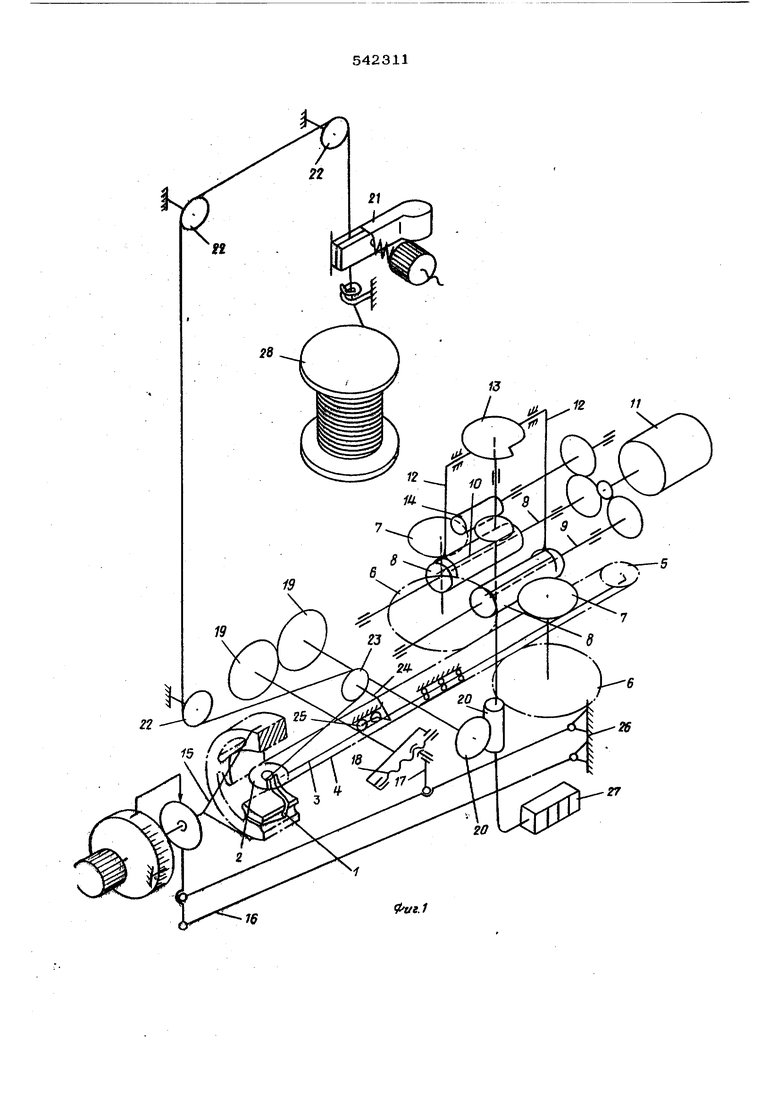
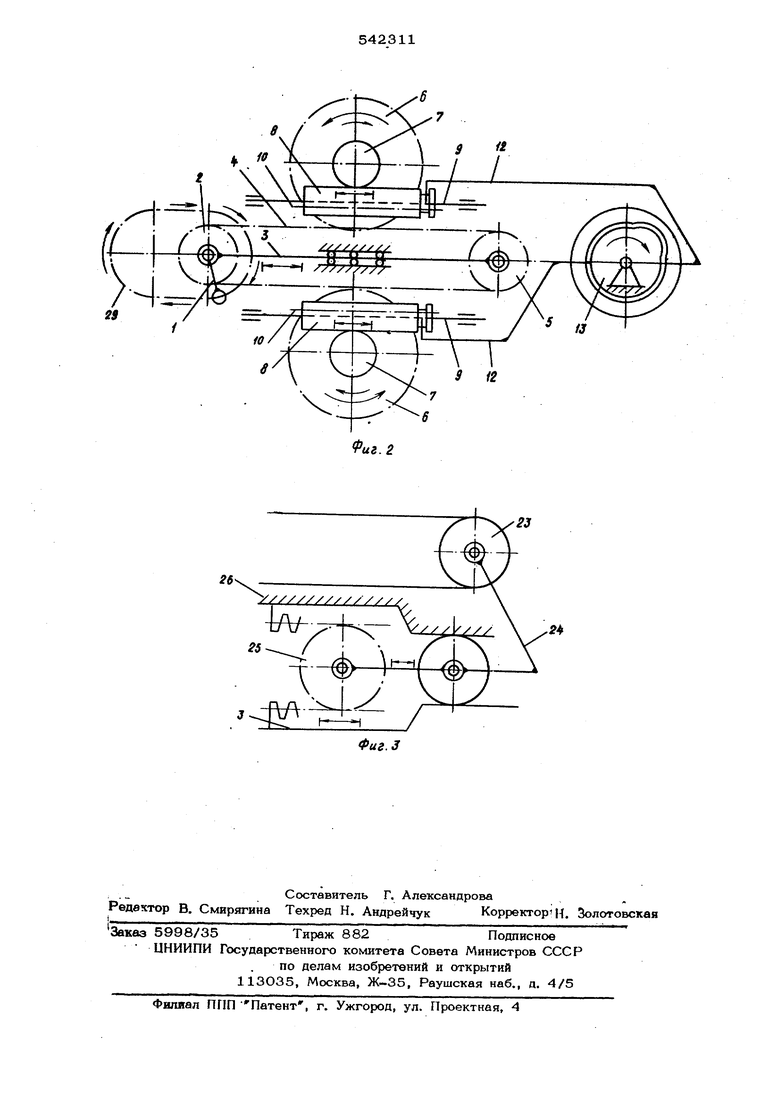
Целью настоящего изобретения является повышение универсальности станка путем обеспечения намотки статоров с различной геометрией витка. Указанная цепь достигается тем, что про водоукладчик выполнен в виде каретки, установленнрй с воэможностью воэвратно-поступательного перемещения вдоль оси стато ра и несущей две авб}здочки, соединенные ме ду собой бесконечной гибкой связью, а поводок закренлен в центре одной из звездочек Кроме того, привод проводоукладчшса выполнен в виде двух звездочек, находя щихся в зацеплении с гибкой связью, и двух червячных пар, червяки которых уста новлены с возможностью осевого перемещения и взаимодействуют с кулачком, а каждое из червячных колес жестко, связано со звездочкой, причем натяжное устройство содержит компенсационный ролик, установленный} на ползуне с возможностью воэвратно-поступательного перемещения со скоростью, в. два раза меньшей скорости проводоукладч1гка, На фиг. 1 изображена кинематическая схема станка; на фиг, 2 - траектории дви жения основных деталей проводо гкладчтжа и привода; на фиг. 3 схема кинемати™ ческой связи компенсационного ролика со станиной и кареткой. Станок содержит проводоукладчик, состояшнй из трубчатого поводка 1, закреплен™ него в центре звездочки 2, каретки 3, .замкнутой в копьпе гибкой связи 4, на™ пример перфорированной ленты; натяжной звездоти 5; привод состоящий из двух чзвездочек 6, находящихся в зшдеплении с гибкой связью проводоукладчика, и двух червячных пар, червячные колеса 7 кото- рых жестко связаны со звездочками 6, а червяки 8 установлены на валах 9 на сколгэзя1Щ1х шпонках 10 и связаны через систему зубчатых колес с двигателем 11 и через тошсатели 12 с кулачком 13, ко торый та7О е связан с двигателем 11 чере систему зубчатых колес и червячную пару 14; механизм фтссации статора, состоя- ПЛ1Й из поворотной головки 15, устаноплем ной на шарнирном параллелограмме 16; механизм раскладки провода по вьюоте, состоящий из шатуна 17 и кривошипа 18, связанного через гитару шестерен 19 и червячные пары 20 и 14 с двигателем 11 натяжное устройство 21 с направляюшими роликами 22 и компенсационным роликом 2,3, установленным на ползуне 24, связанН 1м чороз зубчатое колесо 25 с кареткой 3 и станиной 20, II счетчик 27 числа виткоп. Станок работает следующим образом. Пакет стпто1),1 п,п 11рплякуг и поворотной голоико 1 5), про1М1д ( баблны 28 пропускакл чореа патяжнсю ycTjioiiCTBO, центр зБездоч:к51 2 и по зоцок 1 и закретляют на статоре. Взшючают двигатель 11. Движе ние поводка 1 по траектория 29, образован ной двумя полуокружностями (вращательное движение) и двумя прямыми участками (поступательное движение) обеспечивает наматывание провода на полюс статора, Для того чтобы получить врааштепьное движение поводка, исхшючаю-т осевые перемещения; червяков 8 вдоль валов 9. В этом случае обе звездочки 6, приводиглые во вращение двигателем 11 через кинема- тические цепи с равными передаточными отношениями, вращаются в одну сторону с одинаковой угловой скоростью, в;апример против часовой стре.Жи (см, фиг. 2); При этом верхний участок гибкой связи 4 движется вправо, а нижний участок с той же скоростью влево, Е пезул -.: те указанпого движения гибкой связи харетка 3 неподвижна, а поводок 1; закреплениьи; на звездочке 2, врашаетсп по часовое стреяке. Для получения постугштелыюго движения поводка влево верхнему черпяку 8, не изменяя скорости его зрашеняя, сооб™ шают осевое перемезлеиле ггавстречу двяженню его винаовой пинии. ( Е /:(ainio:vi вправо) с удБое - ной скорг;ст ;-:ю, В результате сложеппя движения вллтовой линии червяка от вращении и от огО ОСВЕОго nepeNieitteinjH верхнее червячиоа колесо 7 и соязаннагз с нпм звездочка G ют направление своего вращения. В зтом случае и верхний и учасТки гибкой связи 4 двигаются влево с одинпковой скоростью. В результате зказагигого .епля гибкой связи поводок 1 npeKpair.aer враою-нне и поступательно перемелхается влеьо вместе с гибкой связью, кареткой и звездочками 2 и 5. Для возобповлеппя Bpaincinui п.лзсдка 1 прекра1лают осевое перемищонпе нэк.яка вправо, сообщают осег;ое uajJONieciaruie влево нижнему червяку. Последовательное че- редоваиие осевьтх 1 С1- :ме1дот1Лй и с-становок червяков, осуи1ес.гпл;1ОМ( DfifUueH/iGM кулач « ка 13, обеспечивает oa iKHj fbiii HHKJJ движения поводка 1. Двигатель 11 ч€;г)ез систему ;;убчатых зацеплений и крквоипт J-B иередает двиясвние ишриирному парапкзлограм.му ю и паворотной головке 15, и енускание которой обеспечивает рас ;ларку, витков в радиальном и;лфаг ле1п;н. Во время посту11ател Л ого перемещения каретки 3 в же iianpasi.ieHjiii, но со скеростые в Два рааа .iic, чем CKOJKJCTLкареткн г еремешаетс компиисакчгплллй ролик 23, Tajciie перемеиклпи компеиеа дионного ролика исключают пульсацию скорости сматывания провода с неподвижной бобины, которая возникает в случае отсутствия компенсационного ролика, из-за отйосительного перемещения проводоукладчика и бобины. После намотки одного полюса статор вместе с поворотной головкой поворачивают на требуемый угол и ведут намотку сл дующего полюса. Эффективность применения данного стан по сравнению с существующими конструкци ями заключается в повышении универсалвэ- ности технологического оборудования для намотки статоров. Если требуется изменить траекторию движения поводка, например, если трубется увеличить длину прямо линейного участка, то заменяется только кулачок 13. Соответствующим профилем кулачка можно обеспечить не только вращательное движение поводка, но и возвратно поступательное его движение, а также любую комбинацию сложения этих движений Введение в натяжное устройство компенсационного ролика позволило установить бобину с приводом на основании стан ка без возникающей в этом случае дополнительной пульсации в скорости сматыва: ния провода с бобрны, , Формула изобретения 1. Станок для намотки статоров электрических Машин, содержащий проводозгклад чшс, взаимодействующий через бесконечную гибкую связь с приводом, поводок, механизм фиксации статора и натяжное устройство, отличающийся тем, что, с целью повыщения универсальности сташа путем -обеспечения намотки статоров с :различной геометрией витка, проводоук,ладчик выполнен в виде каретки, установленной с возможностью возвратно-поступа- ;тельного перемещения вдоль оси статора ,и несущей две звездочки, соединенные между собой бесконечной гибкой связью, причем в центре одной звездочки установлен поводок. 2.Станок по п. 1,отличающийс я тем, что привод проводоухладчика выполнен в виде двух звездочек, находящихся в зацеплении с гибкой связью, и двух червячных пар, червяки которых установлены с возможностью осевого перемещения и взаимодействуют с кулачком, а каждое из червячных колес жестко связано со звездочкой. 3.Станок по пп. 1 и 2, о т л и ч а ю щ и и с я тем, что натяжное устройство провода содерл ит компенсационнь й ролик, установленный на ползуне с возможностью возвратно поступательного перемещения со скоростью, в ива раза меньшей скорости проводоукладчика. Источники информации, принятые во внимание при экспертизе: 1.Авт. св. СССР № 1412О6, М. кл. Н О2 К 15/085, 1961 г. 2.Патент США 312040.9, кл. 20-205, 1964 г. . // . i-..2 

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для намотки статоров электрических машин | 1980 |
|
SU936250A1 |
| Устройство для намотки статоров электрических машин | 1981 |
|
SU1010703A1 |
| Станок для намотки обмоток статоров электрических машин | 1986 |
|
SU1417113A1 |
| Станок совмещенной намотки обмоток статоров электрических машин | 1986 |
|
SU1334295A1 |
| Станок для намотки обмоток статоров электрических машин | 1985 |
|
SU1300601A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ ГИБКОГО ДЛИННОМЕРНОГО МАТЕРИАЛА | 2012 |
|
RU2505371C1 |
| НАМОТКИ ЭЛЕКТРИЧЕСКИХ КАТУШЕК | 1965 |
|
SU171917A1 |
| Намоточная головка | 1988 |
|
SU1585839A1 |
| Станок для изготовления электрических катушек | 1983 |
|
SU1220021A1 |
| Станок для обмотки малогабаритных статоров электродвигателей | 1960 |
|
SU141205A1 |
23
Фиг.З
