Изобретение относится к приборостроению в частности к устройствам, измеряющим угол наклона объекта, и может быть использовано, в частности, в прокатываемых вручную профилографах, уклономерах и т.п. приборах.
Известны прокатываемые вручную профилографы и уклономеры, такие как нивелиравтомат Артанова, профилографы рельсовых путей, где в качестве датчика утла наклона используется физический маятник. Во всех этих приборах величина периода собственных колебаний маятника устанавливалась произвольно, как следствие его конструктивных параметров - габаритов, требуемой точности, типа отсчетной системы и др. При этом величина периода собственнь-х колебаний маятника лежит в пределах 0,5-0,8 сек 1. 2 .
Существенным недостатком датчиков этого типа является их высокая чувствительность и влияние продольных ускорений, что ведет к значительному снижению точности измерений.
Продольные ускорения, воздействующие на маятник , складываются из синусоидальных короткопериодических ускорений (с периодом 0,6-0,8 сек), вызываемых иЗменением скорости в течение одного шага оператора, и длительных ускорений, вызываемых колебаниями средней скорости и носящих хаотический характер.
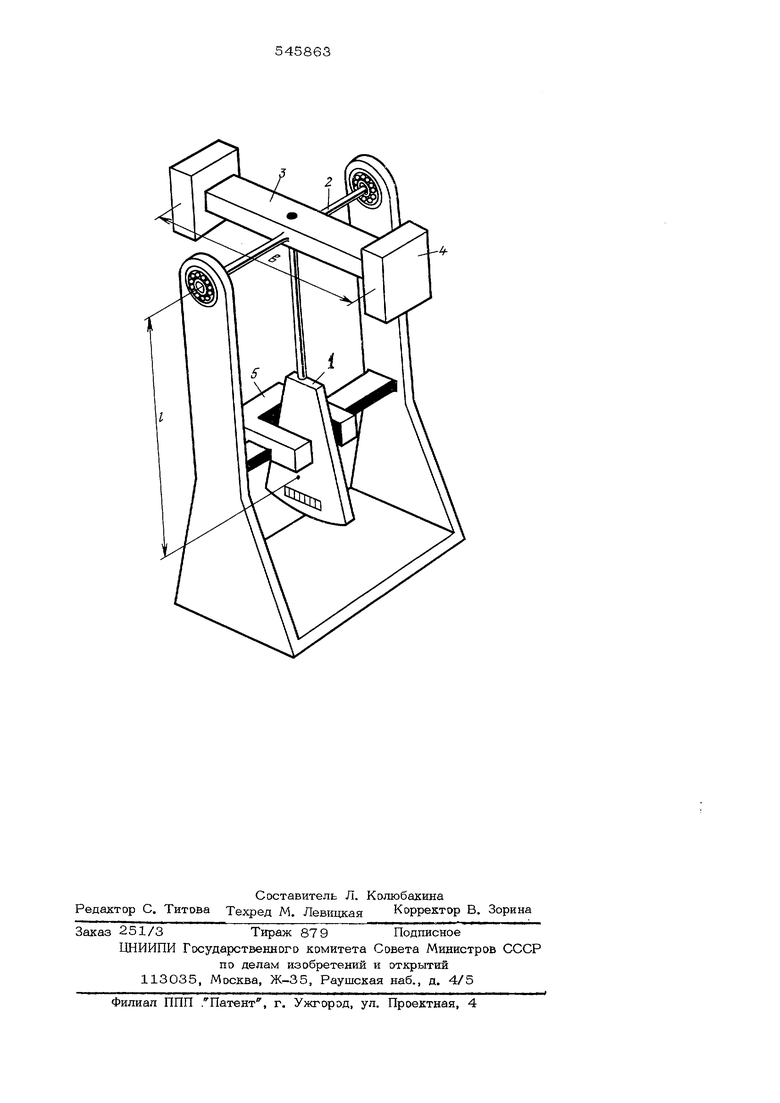
Известен датчик тла наклона, преимущественно для профилографа, прокатываемого вручную, содержащий одностепенный физический маятник, демпфер, отсчетное и компенсирующее устройство. Недостатком датчика является его низкое быстродействие, вызываемое неизбежными люфтами кинематических цепей и инерционностью электрических цепей. Вследствие этого короткопериодические ускорения практически не устраняются, что приводит к некоторому увеличению случайной погрешности измерений при малых углах наклона трассы, а при движении по трассе с уклоном более 2 вследствие неперпендикулярности направления короткопериодических ускорений и вертикали возникает систематическая погрешность, возрастающая с увеличением уклона. Для устранения погрешности необходимо, чтобы период собственных колебаний маятника не менее чем в 2-3 раза превышал период короткопериодических ускорений. Однако такое увели-6 чение периода колебаний маятника путем ув личения его длины создает весьма значител ные конструктивные трудности и требует резкого увеличения мощности демпфера. Цель изобретения - упрощение датчика и уменьшение динамических погрешностей от колебаний скорости. Цель дскзтигается тем, что компенсирующее устройство выполнено в виде двух инер ционных масс, жестко укрепленных на концах горизонтальной штанги, закрепленной на оси подвеса маятника перпендикулярной ей, причем масса и штанга сбалансированы относительно оси подвеса маятника. Величину инерционных масс и длину шта ги целесообразно выбрать из выражения: , Т tnoМГ , у-тгз. ..„„ где М - величина одной инерционной маеt) - расстояние между центрами тяжести инерционных масс, Т - требуемый период колебаний, - момент инерции маятника (без инерционных масс) относительно точки подвеса, m - масса маятника, - длина маятника. На чертеже изображена принципиальная схема предлагаемого датчика. Датчик содержит маятник 1 с осью подвеса 2, штангу 3 с двумя инерционными ма сами 4 на концах; штанга сбалансирована относительно оси подвеса. Размеры штанги и величина инерционных масс подбираются так, чтобы период колебаний составлял 1,8-2,0 сек. Достигаемое таким образом увели чение периода колебаний позволяет сохранит первоначальную длину маятника и не требуе увеличения мощности демпфера 5, поскольку штанга сбалансирована относительно оси подвеса и не реагирует на ускорения. При движении профилографа маятник за один период собственных колебаний испытывает воздействие нескольких коротко-периодических ускорений, взаимно исключающих друг друга, вследствие чего погрешность измерений резко уменьшается. Так систематическая погрешность полностью устраняется во всем угловом диапазоне, а случайная погрешность измерений уменьшается на 10-15%. Формула изобретения 1. Датчик угла наклона, преимущественно для профилографа, прокатываемого вручную, содержащий одностепенный физический маятник, демпфер, отсчетное и компенсирующее устройства, отличающийся тем, что, с целью его упрощения и уменьшения динамических погрешностей от колебаний скорости, компенсирующее устройство выполнено в виде двух инерционных масс, жест ° укрепленных на концах горизонтальной штанги, закрепленной на оси подвеса маятника перпендикулярно ей, причем массы и штанга сбалансированы относительно оси подвеса маятника, 2. Датчик угла наклона по п. 1, о т л ичающийся тем, что величину инерционных масс и длину штанги выбирают из выражения: - величина одной инерционной Ъ - расстояние между центрами тяжести инерционных масс, Т - требуемый период колебаний, Э - момент инерции маятника (без инерционных масс) относительно точки подвеса, т - масса маятника, - длина маятника. Источники информации, принятые во внимание при экспертизе; 1.Авторское свидетельство СССР № 195132, кл. G 01 С 7/04, G01C9/O6, 24.02,66. 2.Авторское свидетельство № 171121, кл, G- 01 С 7/04, 30,12.63, 3.Авторское свидетельство № 86848, кл. G 01 С 7/04, 1950 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла наклона | 1976 |
|
SU682761A1 |
| ПАТЕНТНО-ТЕ;^^;? "^1^МБИБЛИЭ ':-7iAБ. Г. Смирнов | 1970 |
|
SU284327A1 |
| ПАТЕНТНО-ТЕХН;14ЕГКАЯБИБЛИОТЕКАБ. Г. Смирнов | 1971 |
|
SU302601A1 |
| Акселерометр космический | 2019 |
|
RU2721589C1 |
| Устройство для измерения малыхуглОВ НАКлОНА | 1979 |
|
SU838336A1 |
| Устройство для измерения возвы-шЕНия ОдНОгО РЕльСА НАд дРугиМ | 1979 |
|
SU851093A1 |
| Инерциальный волнограф | 1988 |
|
SU1673833A1 |
| Устройство для установки низкочастотных сейсмоприемников и проверки их параметров | 1975 |
|
SU601644A1 |
| Амортизированный гравиметр | 2022 |
|
RU2792153C1 |
| Способ защиты от вибрации и устройство для его осуществления | 2017 |
|
RU2669914C2 |