1
Изобретение относится к области измерительной техники и может найти применение в качестве чувствительного элемента в системах автоматического регулирования.
Известны датчики электромашпнного типа, которые строятся на базе различных электрических машии (1).
Недостатка.ми этих датчиков являются низкая крутизна преобразования и наличии в выходном сигнале помех и частот, завнсяндих от частоты врапдеиия.
Известны датчики сейсмического типа, которые имеют склонность впадать в резонанс и создают значительный нулевой фон, обусловленный технологическими иогрешностя.ми датчика электрического сигнала, а также имеют достаточно сложную конструкцию (2).
Кроме того известно устройство, содержащее иреобразователь скорости враи;ения в электрический сигнал, например синхронный т-фазный генератор, обмотки которого связаны с входами т. дифференцнруюии1х устройств, умножители на синфазные синусоидальные функиии угла поворота иреобразователя скорости, выходы которых связаиы с входами выходиого сумматора (3).
На выходе сумматора образуется постоянный сигнал, пропорциональный углово.му ускорению,
Недостатком известного устройство является ограниченный рабочий диапазои скоростей вращения, при которых измерение ускорений производится с недостаточной точностью.
Для расширения рабочего днаназоиа скоростей и увеличения точности измерения в диаиазоне высоких скоростей в предлагаемое устройство введены /п умнол ителей на опережающие синусоидальные функции угла иоворота, т умиол птелей на отстающие синусоидальные функции угла поворота и т дополнительных и вспомогательный су.мматоры, причем выходы ш дифференцнрующих устройств подключены к первым входам т донолнительных сумматоров и через умножители на опережающие сииусондальные функции - к входа.м вспомогательного сумматора, выход которого через умножители на отстающие синусоидальные функции соединен со вторыми входами m дополнительных сумматоров, а их выходы согдннены с входами упомянутых умножителей иа синфазные синусоидальные функции угла иоворота.
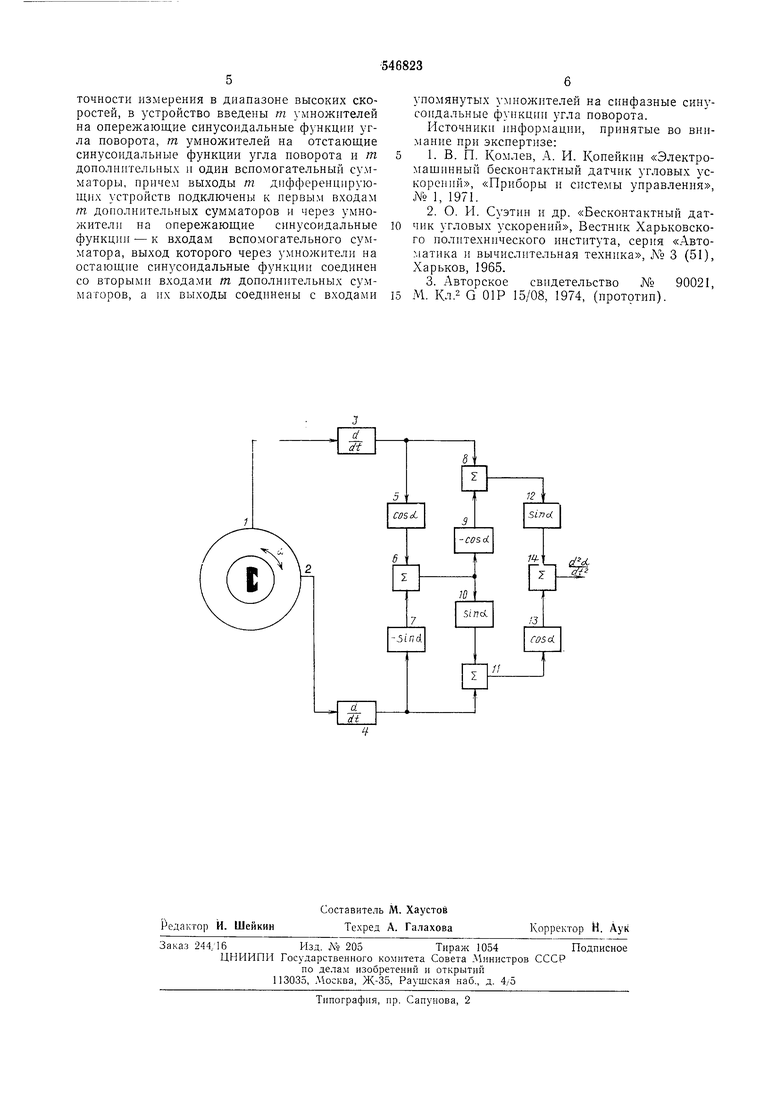
На чертеже иривеДена функциональиай схема описываемого устроГктва.
Выходы 1 и 2 двух фаз генератора черс;; днфференцнрующ.не устройства 3 н 4, а также соответственно через умиожитель 5 иа cos а (где а-угол иоворота ротора генератора) и через умиожитель 7 на (-sin а) связаны с
входами вспомогательного сумматора 6, и, кроме того, с первыми входами дополнительных сумматоров соответственно 8 и 11. Выход сумматора б через умножитель 9 на (-cos а) соединен со вторым входом сумматора 8 и через умножитель 10 на sin а со вторым входом сумматора 11. Выходы сумматоров 8 и 11 соответственно через умножитель 12 на sin а II через умножитель 13 на cos а связаны с входами выходного сумматора 14, на выходе которого формируется сигнал, пропорцпоd
нальныи УГЛОВОМУ ускорению - ,. df
Коэффициенты передачи умножителей для упрощения приняты равны.ми 1.
На входы Д фференцирующих устройств подаются напряжения
г т.г da .
и : LE sin а,
dt
г dd.
и Сяcos я.
ut
Продифференцированные напряжения
11 . . . , / rfa 2I
з-С.| -sm.+ . cosaj,
т т/- г Лг . П
)
подаются на первые входы сумматоров 8, 11 и на входы у.множнтелей 5, 7. Синусоидальные функции этих умножителей являются
опережающими на по отношению к напряжениям соответствуюииьх фаз геиератора.
Выходные напряжения умножителей 5, 7, соответственно равные
Ur cos а ; СЕ -- sin а X
dt
X cos 7. +
cos
dt
fy,.(-sina) Ся I sin я
dt
X COS я + (- ) sin я dt J
суммируются на сумматоре 6
U, U, + U, СЕ
X
dt
da.
X{COs4 + )C(j
Составляющие, пропорциональные
взаимно уннчтожаются, благодаря чему выделяется в чистом виде сигнал помехИ;
Напряжение помехи /в подается на умножители 9, 10, синусоидальные функции которых являются отстаюи.ими на - от напряжений соответствующих фаз генератора. Благодаря этому на вторые входы И подаются напряжения
f/, и,(- cos а) - Ся
di
i, i/,.Sina :C f sina.
dt
Выходные напряжения сумматоров не содержат сигнала помехи
и, и, + и, Ся-sina,
dt
11 4 . Ь-4:1 os
dt
Пройдя через умножители 12, 13 фазные синусондальные функции, эти жения преобразуются к виду
г гг I.. Я
6j2 (У,-Sinа Ся-т:: sin я,
dt
13 и cos а - Ся d
Сложеине этих напряжений на сумматоре 14 позволяет нолучить
.
,.
,я С к
. d
13
Таким образом, выходное постоянное напряжение устройства пропорционально угловому ускорению вращения вала генератора. Полярность нанряжения определяется знаком ускорения.
Функции по преобразованию полезного сигнала н сигнала помехи в умножителях разделены. 1ак, для умножителей 5, 7, 9, 10 «рабочим является сигнал помехи. Умножители 5, 7 (совместно с сумматором 6) выделяют снгнал, пропорциональный квадрату скорости. При этом исключение сигнала, пропорционального ускорению, в силу его относительной малости происходит с достаточной точностью. Умножители 9, 10 иреобразуют только сигнал номехи. Исключение помехи нронсходнт в су.мматорах 8, 11, поэто.му на умнол ители 12, 13 подается полезный сигнал, не содержащий помехи, чем обеспечивается точное формирование выходного сигнала устройства, пропорционального угловому ускорению.
Таким образо.м, каждый из у.множителей должен преобразовывать или полезный сигнал, или сигнал помехи.
Формула изобретения
Устройство для измерения угловых ускорений, содержащее преобразователь скорости вращения в электрический сигнал, например, синхронный /п-фазный генератор, обмотки которого связаны со входами т дифференциру ющих устройств, умножители на синфазные синусоидальные функции угла поворота преобразователя скорости, выходы которых свя заны с входами выходного су.мматора, отличающееся тем, что, с целью расщнрений рабочего диапазона скоростей и )величенйя
точности измерения в диапазоне высоких скоростей, в устройство введены т умножителей на опережающие синусоидальные функции угла поворота, т умножителей на отстающие синусоидальные функции угла поворота и т дополнительных и один вспомогательный сумматоры, причем выходы т дифференцирующих устройств подключены к первым входам т дополнительных сумматоров и через умножители на опережающие синусоидальные функции - к входам вспомогательного сумматора, выход которого через умножители на остающие син тоидальные функции соединен со вторыми входами т дополнительных сумматоров, а их выходы соединены с входами
упомянутых умножителей на синфазные синусоидальные функции угла поворота.
Источники информации, принятые во внимание при экспертизе:
1.В. П. Комлев, А. И. Копейкин «Электромашинный бесконтактный датчик угловых ускорений, «Приборы и системы уиравлення, № 1, 1971.
2.О. И. Суэтин и др. «Бесконтактный датчик угловых ускорений. Вестник Харьковского политехнического института, серия «Автоматика и вычислительная техника, ЛЬ 3 (51), Харьков, 1965.
3.Авторское свидетельство А 90021, М. Кл.2 G 01Р 15/08, 1974, (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СДВИГА ФАЗ СИГНАЛОВ С ИЗВЕСТНЫМ ОТНОШЕНИЕМ ИХ АМПЛИТУД | 1993 |
|
RU2039362C1 |
| Устройство для определения вектора дисбаланса | 1990 |
|
SU1755081A1 |
| Устройство для формирования опорных сигналов управления синхронным двигателем | 1985 |
|
SU1319225A1 |
| Следящий привод | 1975 |
|
SU546853A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2487365C1 |
| Многофункциональное устройство для релейной защиты электроустановки | 1989 |
|
SU1705941A1 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА И ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484499C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| Бесконтактный реверсивный тахогенератор постоянного тока | 1976 |
|
SU552663A1 |
