Изобретение относится к области контроля исправности систем управления маневренных подвижных объектов и, в частности, к средствам комплексного аппаратурно безызбыточного контроля платформенных инерциальных навигационных систем, пилотируемых и беспилотных наземных, воздушных и космических аппаратов, минимального веса, габаритов, энергопотребления, сложности и стоимости. Оно также может быть использовано для создания простых и высоконадежных средств контроля и резервных каналов пилотажно-навигационных систем современного самолета, защищенных от отказов и сбоев основной многократно резервированной сложной гироинерциальной системы управления.
Известно устройство контроля пилотажно-навигационной системы самолета ИЛ-86 [Воробьев В.Г., Глухов В.В, Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. С.290, 368, 375; Морозов В.В., Баринова Т.В. Приборное оборудование самолета ИЛ-86 и его эксплуатация. Учебное пособие. Ульяновск: Центр ГА СЭВ, 1989], в котором широко применяется аппаратная избыточность датчиков курса, рыскания, тангажа, крена трех инерциальных навигационных систем (ИНС), резервированных блоков датчиков угловых скоростей (БДГ), датчиков скоростей и других приборов, реализуемых мажоритарными блоками контроля крена (БКК), базовой системой курса и вертикали (БСКВ), блоком формирования команд (БФК). Среднее значение трех одноименных полетных параметров с мажоритарного блока сравнивается с выходными сигналами датчиков и по рассогласованию делается вывод об исправности соответствующего датчика системы. При этом обеспечивается высокая информационная производительность контроля платформенной ИНС I1=IVξ+IVη+IVζ+Iψ+Iϑ+Iγ=0,698 бит/с [1, с.11-13]. Трехкратное увеличение веса, габаритов, энергопотребления, стоимости приборного оборудования с целью повышения безопасности полета здесь вполне допустимо. Однако сложность контроля, и как следствие его низкая надежность и достоверность обнаружения отказа именно датчиков комплекса, содержащего например типовые элементы: платформенную инерциальную навигационную систему ИНС-2000 (среднее время наработки на отказ TИНС=1000 час), бортовую цифровую вычислительную машину БЦВМ 80-30301 (среднее время наработки на отказ TБЦВМ=18000 час), делает его малоэффективным по достоверности PД1=0,526 и времени достоверного контроля TД1=3,1 час, для времени полета t=2 часа. Это требует большого объема регламентных, предполетных работ [2, 3]. Надежность платформенной инерциальной навигационной системы, состоящей из трех ИНС-2000 и БЦВМ 80-30301, здесь очень велика и составляет T=16300 час. Весовые G1=21×3+8=71 кг и габаритные характеристики V1=(385×264×195)×3+(140×140×22)×2=60322 см3 значительны. Устройство исключительно затратно, так как его работа связана с расходом ресурса сразу трех весьма дорогих инерциальных систем.
Известны устройства контроля инерциальных навигационных систем с применением наблюдателей состояния, объединяемых фильтром Калмана или Льюенбергера [Кузовков Н.Т. Системы стабилизации летательных аппаратов. М.: Высшая школа, 1976, с.191-205; Авиациионная радионавигация: Справочник. Под ред. А.А. Сосновского. М.: Транспорт, 1990. с.30-31; Колодежный Л.П., Чернодаров А.В. Надежность и техническая диагностика. М.: Изд. ВВА им. проф. Н.Е. Жуковского и Ю.А. Гагарина, 2010. с.178]. Наблюдатель состояния строится на основе модели объекта контроля и помех, подключенной параллельно и охваченной дополнительной обратной связью по сигналу рассогласования модели и объекта. Модель объекта контроля, как правило, имеет упрощенный линеаризованный характер. При этом коэффициент обратной связи выбирается таким образом, чтобы выход модели как можно точнее совпадал с выходом контролируемой инерциальной навигационной системы. Следя за величиной рассогласования, можно осуществить непрерывный контроль за исправностью системы. Основная трудность в реализации устройства заключается в определении переменных коэффициентов обратной связи по адекватной модели сложной и размерной платформенной инерциальной навигационной системы и нестационарных корреляционных функций ее случайных помех [4, с.205; 5, с.111, 125, 128, 132 и др.].
Известно устройство контроля платформенной инерциальной навигационной системы в предполетном состоянии [Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. с.374-375]. После горизонтальной стабилизации гироплатформы, проверка исправности производится по условию, что сумма квадратов выходных сигналов коррекции гироскопов должна быть равна квадрату напряжения, соответствующего угловой скорости вращения Земли. Информационная производительность здесь I2=IωX+IωY+IωZ=2,843 бит/с [1, с.11-13]. Контроль возможен только в предполетном режиме работы инерциальной системы и ограничен сигналами угловых скоростей платформы. Информация об угловой ориентации, линейных скоростях летательного аппарата, на котором располагается инерциальная навигационная система, не контролируется.
Известно устройство контроля инерциальной навигационной системы - прототип [Заявка на патент РФ №2012127 530, МПК G05B 23/00, 02.07.2012], содержащее датчики продольной, нормальной, поперечной угловой скорости, датчики крена, тангажа, гироскопического курса, продольный, поперечный, нормальный акселерометры, датчики вертикальной составляющей линейной скорости, западной горизонтальной составляющей линейной скорости, северной горизонтальной составляющей линейной скорости. Выход датчика крена соединен с входами первого и второго функциональных преобразователей. Выход датчика тангажа соединен с входами третьего и четвертого функциональных преобразователей. Выход нормального акселерометра соединен с первым вычитающим входом первого сумматора, второй суммирующий и третий вычитающий входы которого соединены соответственно с выходами первого и второго умножителей, четвертый суммирующий вход - с выходом третьего умножителя, входы которого соединены с выходами первого и четвертого функциональных преобразователей, пятый суммирующий вход - с выходом первого дифференциатора. Выход первого сумматора соединен со входом первого компаратора. Выход поперечного акселерометра соединен с первым вычитающим входом второго сумматора, второй суммирующий и третий вычитающий входы которого соединены соответственно с выходами четвертого и пятого умножителей, четвертый вычитающий вход - с выходом шестого умножителя, входы которого соединены с выходами второго и четвертого функциональных преобразователей, пятый суммирующий вход - с выходом второго дифференциатора. Выход второго сумматора соединен со входом второго компаратора. Выход продольного акселерометра соединен с первым вычитающим входом третьего сумматора, второй суммирующий и третий вычитающий входы которого соединены соответственно с выходами седьмого и восьмого умножителей, четвертый суммирующий вход - с выходом третьего функционального преобразователя, пятый суммирующий вход - с выходом третьего дифференциатора. Выход третьего сумматора соединен с входом третьего компаратора. Первые входы первого и восьмого умножителей подключены к выходу датчика поперечной угловой скорости. Первые входы второго и четвертого умножителей подключены к выходу датчика продольной угловой скорости. Первые входы пятого и седьмого умножителей подключены к выходу датчика нормальной угловой скорости. Выходы первого, второго, третьего компараторов соединены со входами схемы ИЛИ. В состав устройства контроля также входят первый, второй, третий преобразователи координат, пятый, шестой функциональные преобразователи. Выход датчика северной горизонтальной составляющей линейной скорости соединен с первым входом первого преобразователя координат, второй и третий входы которого соединены соответственно с пятым и шестым функциональными преобразователями, подключенными входами к выходу датчика гироскопического курса, четвертый и пятый входы - с выходами соответственно датчика вертикальной составляющей линейной скорости и датчика западной горизонтальной составляющей линейной скорости. Первый выход первого преобразователя координат соединен с пятым входом второго преобразователя координат, второй выход - с четвертым входом второго преобразователя координат, третий выход - с первым входом второго преобразователя координат, второй и третий входы которого соединены соответственно с выходами третьего и четвертого функциональных преобразователей. Первый выход второго преобразователя координат соединен с четвертым входом третьего преобразователя координат, второй выход - с пятым входом третьего преобразователя координат, третий выход - с первым входом третьего преобразователя координат, второй и третий входы которого соединены соответственно со вторым и первым функциональными преобразователями. Первый выход третьего преобразователя координат соединен с входом первого дифференциатора и вторыми входами четвертого и восьмого умножителей, второй выход третьего преобразователя координат соединен с входом второго дифференциатора и вторыми входами второго и седьмого умножителей, третий выход третьего преобразователя координат соединен с входом третьего дифференциатора и вторыми входами первого и пятого умножителей.
Устройство контроля инерциальной навигационной системы содержит преобразователь координат, включающий последовательно соединенные девятый умножитель, первый вход которого соединен с первым входом преобразователя координат, второй вход - со вторым входом преобразователя координат, четвертый сумматор, второй вход которого соединен с выходом десятого умножителя, а выход - с первым выходом преобразователя координат, последовательно соединенные одиннадцатый умножитель, первый вход которого соединен с первым входом преобразователя координат, второй вход - с третьим входом преобразователя координат, первая схема вычитания, суммирующий вход которой соединен с выходом одиннадцатого умножителя, вычитающий вход - с выходом двенадцатого умножителя, а выход - со вторым выходом преобразователя координат, четвертый вход преобразователя координат соединен с его третьим выходом, пятый вход - с первыми входами десятого и двенадцатого умножителей, вторые входы которых соединены соответственно с третьим и вторым входами преобразователя координат.
Отсутствие избыточных датчиков, необходимых для обнаружения отказа, сделало целесообразным применение этого устройства в пилотажно-навигационных комплексах подвижных объектов. Устройство использует информацию датчиков, уже имеющихся на борту и входящих в состав штатного приборного оборудования. Устройство контроля, принятое за прототип, имеет наименьшую стоимость, вес G3=38+8=46 кг, энергопотребление и габариты V3=670×310×230+(140×140×22)×2=48633 см3. Информационная производительность [1, с.11-13] контроля для прототипа составляет I3=IVξ+IVη+IVζ+Iψ+Iϑ+Iγ+IωX+IωY+IωZ+IaX+IaY+IaZ=4,114 бит/с, а достоверность контроля -PД3=0,882502. Среднее время достоверного контроля - TД3=16 час., для бесплатформенной инерциальной навигационной системы И-42 (среднее время наработки на отказ TИ-42=2400 час, ЦВМ 80-30301 TБЦВМ=18000 час [6, 7]).
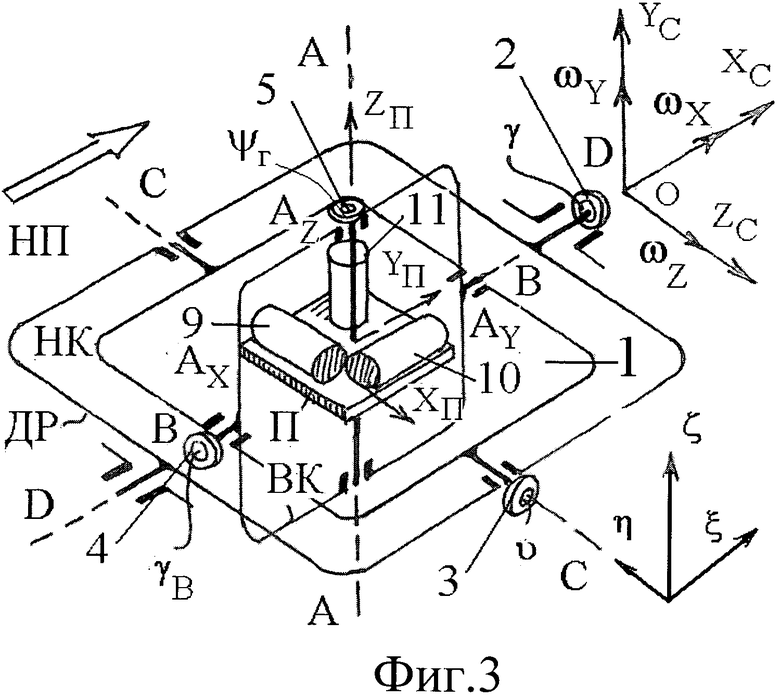
Недостатком известного устройства - прототипа является его неспособность контролировать любую платформенную инерциальную навигационную систему классической четырехрамочной схемы (фиг.3) [Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. С.360, 371], по которой построены большинство систем полуаналитического типа [Помыкаев И.И, Селезнев В.П., Дмитроченко Л.А. Навигационные приборы и системы. М.: Машиностроение, 1983. С.294] управления маневренных подвижных объектов. Это обусловлено тем, что продольный, нормальный, поперечный акселерометры, подключаемые к входам устройства контроля в бесплатформенной инерциальной системе, связаны с корпусом объекта. Западный, северный и вертикальный акселерометры платформенной инерциальной системы соединены с платформой в кардановом подвесе. Датчик внешнего крена в бесплатформенной системе вообще отсутствует. Работа системы стабилизации платформы не проверяется. Для эффективного контроля желательна полнота контроля выходных сигналов платформенной инерциальной навигационной системы, высокая информационная производительность, достоверность, аппаратная безызбыточность, универсальность контроля по типу средств гиростабилизации платформы, при минимуме веса, габаритов и стоимости.
Основной задачей, на решение которой направлено заявляемое устройство, является создание аппаратурно безызбыточной комплексной системы автоматического контроля для весьма распространенной схемы полуаналитической платформенной инерциальной навигационной системы повышенной точности, надежности, информационной производительности, достоверности контроля с высокими технико-экономическими показателями по весу, габаритам, энергопотреблению, стоимости, универсальности контроля гиростабилизации платформы с акселерометрами, удобству эксплуатации на легком маневренном объекте, практическая реализация которой возможна простейшим безынерционным алгоритмом встроенного или внешнего вычислителя аналогового или дискретного типа.
Техническим результатом, достигаемым при осуществлении заявленного изобретения, является повышение достоверности обнаружения отказа, информационной производительности, точности контроля параметров с безызбыточными средствами минимального веса, габаритов, энергопотребления, сложности и стоимости при одновременном повышении эффективности выполнения полетных задач объектом. Полнота контроля включает все выходные сигналы системы. Устройство применимо для большого числа платформенных инерциальных систем с электромеханическими, поплавковыми, двух-трехстепенными, лазерными, вибрационными, волоконно-оптическими, микромеханическими и другими гироскопами в контурах стабилизации платформы с акселерометрами. При этом обеспечивается работа как в полетном, так и предполетном состоянии комплекса. Контроль ведется по безынерционным соотношениям, содержащим простейшие операции, реализуемые вычислителем на борту подвижного маневренного объекта. Контроль имеет непосредственный, а не косвенный характер, так как ведется по выходным сигналам системы, что обеспечивает защиту потребителей от возможных отказов и сбоев такого важнейшего прибора управления, как инерциальная навигационная система.
Указанный технический результат достигается тем, что в известное устройство контроля инерциальной навигационной системы, содержащее датчик продольной угловой скорости, датчик нормальной угловой скорости, датчик поперечной угловой скорости, первый сумматор, первый вычитающий вход которого соединен с выходом первого дифференциатора, второй суммирующий вход - с выходом первого умножителя, третий вычитающий вход - с выходом второго умножителя, а выход, через первый компаратор - с первым входом схемы ИЛИ, второй сумматор, первый вычитающий вход которого соединен с выходом второго дифференциатора, второй суммирующий вход - выходом третьего умножителя, третий вычитающий вход - с выходом четвертого умножителя, а выход, через второй компаратор - с вторым входом схемы ИЛИ, третий сумматор, первый вычитающий вход которого соединен с выходом третьего дифференциатора, второй суммирующий вход - с выходом пятого умножителя, третий вычитающий вход - с выходом шестого умножителя, а выход, через третий компаратор, - с третьим входом схемы ИЛИ, датчик крена, выход которого соединен с входами первого и второго функциональных преобразователей, выходы которых подключены соответственно к первому и второму входам первого преобразователя координат, датчик тангажа, выход которого соединен с входами третьего и четвертого функциональных преобразователей, выходы которых подключены соответственно к первому и второму входам второго преобразователя координат, датчик гироскопического курса, выход которого соединен с входами пятого и шестого функциональных преобразователей, выходы которых подключены соответственно к первому и второму входам третьего преобразователя координат, датчик вертикальной скорости, датчик северной скорости, датчик западной скорости, введены четвертый преобразователь координат, первая, вторая, третья, четвертая схемы вычитания, первый, второй интеграторы, четвертый, пятый, шестой, седьмой дифференциаторы, четвертый, пятый, шестой компараторы, седьмой, восьмой функциональные преобразователи, задатчик ускорения силы тяжести, западный акселерометр, северный акселерометр, вертикальный акселерометр, датчик внутреннего крена, выход которого, через седьмой и восьмой функциональные преобразователи, соединен соответственно с первым и вторым входами четвертого преобразователя координат, третий, четвертый, пятый входы первого преобразователя координат соединены соответственно с датчиком нормальной угловой скорости, датчиком продольной угловой скорости, датчиком поперечной угловой скорости, третий вход второго преобразователя координат соединен с выходом первой схемы вычитания, вычитающий вход которой, через четвертый дифференциатор, подключен к датчику крена, четвертый и пятый входы - соответственно к первому и второму выходам первого преобразователя координат, суммирующий вход первой схемы вычитания соединен с третьим выходом первого преобразователя координат, третий и четвертый входы четвертого преобразователя координат соединены соответственно с первым и вторым выходами второго преобразователя координат, пятый вход - с выходом второй схемы вычитания, вычитающий вход которой, через пятый дифференциатор, подключен к датчику тангажа, суммирующий вход второй схемы вычитания соединен с третьим выходом второго преобразователя координат, третий и четвертый входы третьего преобразователя координат соединены соответственно с первым и вторым выходами четвертого преобразователя координат, пятый вход - с выходом четвертой схемы вычитания, вычитающий вход которой, через седьмой дифференциатор, подключен к датчику внутреннего крена, суммирующий вход четвертой схемы вычитания соединен с третьим выходом четвертого преобразователя координат, первый выход третьего преобразователя координат, через первый интегратор, соединен с четвертым суммирующим входом первого сумматора, входами второго, пятого умножителей и, через четвертый компаратор, с входом схемы ИЛИ, второй выход третьего преобразователя координат, через второй интегратор, соединен с четвертым вычитающим входом второго сумматора, входами третьего, шестого умножителей и, через пятый компаратор, с входом схемы ИЛИ, третий выход третьего преобразователя координат соединен с суммирующим входом третьей схемы вычитания, вычитающий вход которой, через шестой дифференциатор, соединен с датчиком гироскопического курса, выход третьей схемы вычитания соединен с первым, четвертым умножителями и, через шестой компаратор, с входом схемы ИЛИ, задатчик ускорения силы тяжести соединен с четвертым суммирующим входом третьего сумматора, датчик вертикальной скорости соединен с входами второго, третьего умножителей и третьего дифференциатора, датчик северной скорости соединен с входами первого, шестого умножителей и второго дифференциатора, датчик западной скорости соединен с входами четвертого, пятого умножителей и первого дифференциатора, выходы вертикального акселерометра, северного акселерометра, западного акселерометра соединены с пятыми суммирующими входами соответственно третьего, второго, первого сумматоров, выход схемы ИЛИ является выходом устройства.
Устройство контроля инерциальной навигационной системы отличается также тем, что преобразователь координат содержит последовательно соединенные седьмой умножитель, первый вход которого соединен с первым входом преобразователя координат, четвертый сумматор, второй вход которого соединен с выходом восьмого умножителя, а выход - с первым выходом преобразователя координат, последовательно соединенные девятый умножитель, первый вход которого соединен с вторым входом преобразователя координат, второй вход, как и второй вход седьмого умножителя, соединен с третьим входом преобразователя координат, пятая схема вычитания, суммирующий вход которой соединен с выходом девятого умножителя, вычитающий вход - с выходом десятого умножителя, а выход - со вторым выходом преобразователя координат, четвертый вход преобразователя координат соединен с его третьим выходом, пятый вход - с первыми входами восьмого и десятого умножителей, вторые входы которых соединены соответственно с вторым и первым входами преобразователя координат.
Технический результат достигается тем, что в устройстве контроля инерциальной навигационной системы реализовано измерение величины и направления кажущегося ускорения 




где 
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественных всем признакам заявленного устройства контроля инерциальной навигационной системы, отсутствуют, следовательно, заявленное изобретение соответствует условию „новизна”.
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата и изобретение не основано на:
- дополнении известного устройства-аналога какой-либо известной частью, присоединенной к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно этого дополнения;
- замене какой-либо части устройства-аналога другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
- исключении какой-либо части устройства-аналога с одновременным исключением, обусловленной ее наличием функции, и достижением обычного для такого исключения результата;
- увеличении количества однотипных элементов для усиления технического результата, обусловленного наличием в устройстве именно таких элементов;
- выполнении известного устройства-аналога или его части из известного материала для достижения технического результата, обусловленного известными свойствами материала;
- создании устройства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил, и достигаемый при этом технический результат обусловлен только известными свойствами частей этого устройства и связей между ними;
- изменении количественного признака (признаков) устройства и предоставлении таких признаков во взаимосвязи либо изменении вида взаимосвязи, если известен факт влияния каждого из них на технический результат, и новые значения этих признаков или их взаимосвязь могли быть получены исходя из известных зависимостей, следовательно, заявленное изобретение соответствует „изобретательскому уровню”.
На фиг.1 изображена структурная схема устройства контроля инерциальной навигационной системы, где приняты следующие обозначения:
1 - инерциальная навигационная система;
2 - датчик крена;
3 - датчик тангажа;
4 - датчик внутреннего крена;
5 - датчик гироскопического курса;
6 - датчик вертикальной скорости;
7 - датчик северной скорости;
8 - датчик западной скорости;
9 - западный акселерометр;
10 - северный акселерометр;
11 - вертикальный акселерометр;
12-1, 12-2, 12-3 - первый, второй, третий сумматоры;
13-1, 13-2, 13-3, 13-4, 13-5, 13-6, 13-7 - первый, второй, третий, четвертый, пятый, шестой, седьмой дифференциаторы;
14-1, 14-2, 14-3, 14-4, 14-5, 14-6 - первый, второй, третий, четвертый, пятый, шестой умножители;
15-1, 15-2, 15-3, 15-4, 15-5, 15-6 - первый, второй, третий, четвертый, пятый, шестой компараторы;
16 - схема ИЛИ;
17-1, 17-2, 17-3, 17-4, 17-5, 17-6, 17-7, 17-8 - первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой функциональные преобразователи;
18-1, 18-2, 18-3, 18-4 - первый, второй, третий, четвертый преобразователи координат;
19-1, 19-2, 19-3, 19-4 - схемы вычитания;
20 - датчик нормальной угловой скорости;
21 - датчик продольной угловой скорости;
22 - датчик поперечной угловой скорости;
23-1, 23-2 - первый, второй интеграторы;
24 - задатчик ускорения силы тяжести.
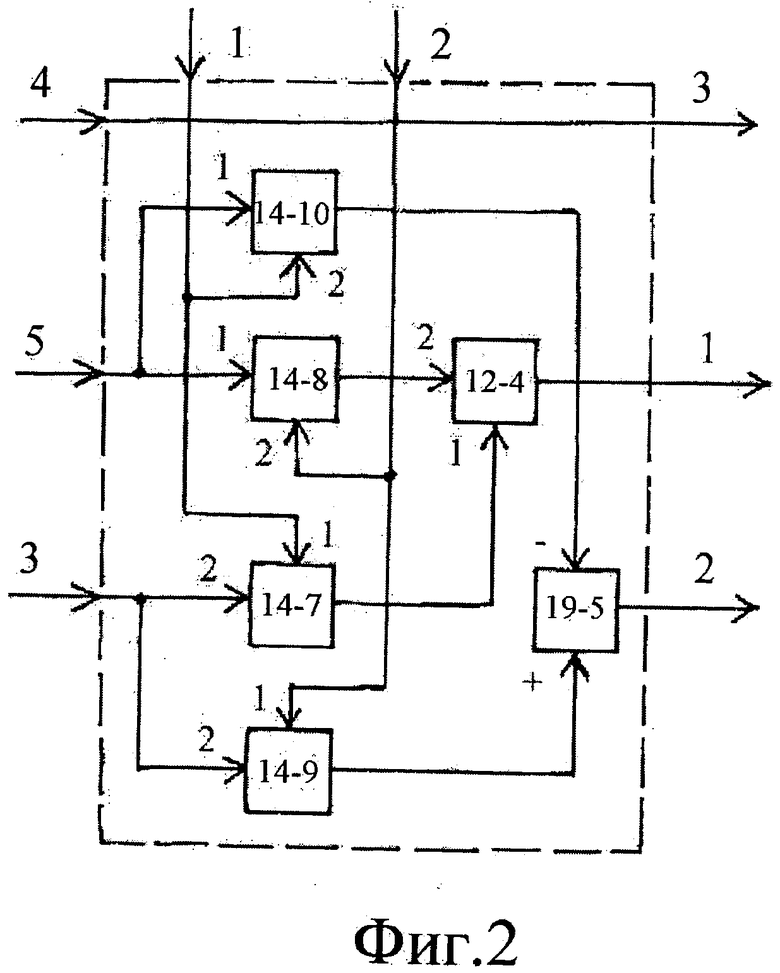
На фиг.2 приведена структурная схема преобразователя координат по п.2 формулы, где приняты следующие обозначения:
12-4 - четвертый сумматор;
14-7, 14-8, 14-9, 14-10 - седьмой, восьмой, девятый, десятый умножители;
19-5 - пятая схема вычитания.
На фиг.3 показана кинематическая схема платформенной инерциальной навигационной системы 1 [7, с.371], содержащей четырехрамочную гиростабилизированную платформу П с акселерометрами AX, AY, AZ, ВК - внутреннее кольцо, НК - наружное кольцо, ДР - дополнительная рама. НП - направление полета в соответствии с положением осей связанной системы координат OXСYСZС подвижного объекта, на котором расположена инерциальная навигационная система. На фиг.1 изображено также положение систем координат и осей подвеса платформы в кардановом подвесе: Oξηξ - неподвижная, горизонтальная, географически ориентированная система координат; Oξ - направление на север (N); Oη - направление на запад (W); OXСYСZС - связанная система координат объекта; OXПYПZП - система координат платформы П; AA - ось подвеса платформы; BB - ось подвеса внутреннего кольца; CC - ось подвеса наружного кольца; DD - ось подвеса дополнительной рамы. По осям подвеса расположены: датчик 2 крена γ, датчик 3 тангажа ϑ, датчик 4 внутреннего крена γВ, датчик 5 гироскопического курса ψГ. Проекции вектора 
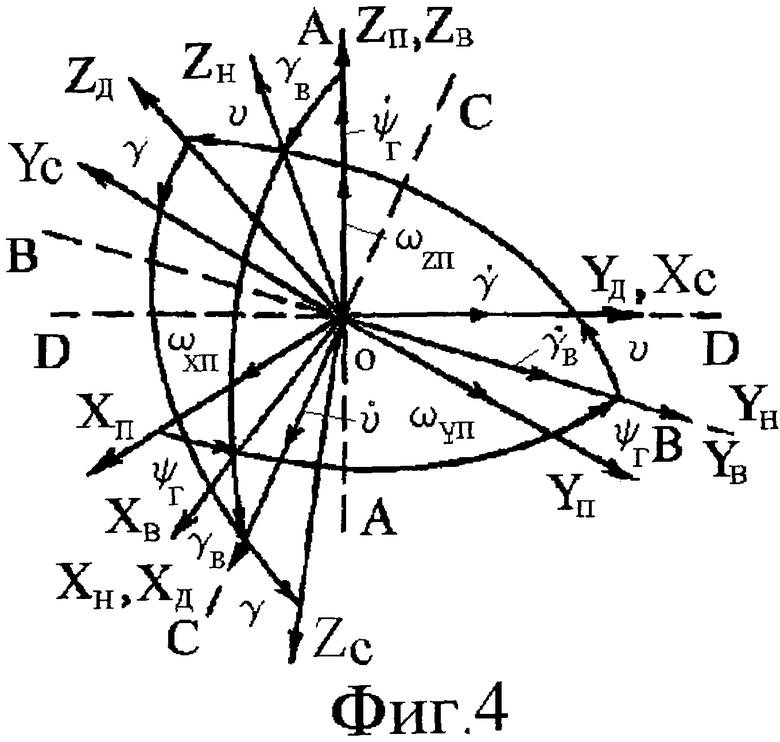
На фиг.4 изображено положение систем координат элементов карданова подвеса платформы, углов и угловых скоростей устройства.
OXВYВZВ - система координат внутреннего кольца ВК;
OXНYНZН - система координат наружного кольца НК;
OXДYДZД - система координат дополнительной рамы ДР;
ψГ, ϑ, γ, γВ - углы гироскопического курса, тангажа, крена, внутреннего крена;
ωXП, ωYП, ωZП - абсолютные угловые скорости платформы П;
ωX, ωY, ωZ - абсолютные угловые скорости объекта, на котором расположена инерциальная навигационная система;
Кинематические соотношения для угловых скоростей элементов карданова подвеса и платформы получаются в виде:

где ωXД, ωYД, ωZД - угловые скорости дополнительной рамы;

где ωXН, ωYН, ωZН - угловые скорости наружного кольца;

где ωXВ, ωYВ, ωZВ - угловые скорости внутреннего кольца;

где ωXП, ωYП, ωZП - угловые скорости платформы.
Углы отклонения платформы П от горизонтальной плоскости системы координат Oξηξ будут 
Проекции абсолютного ускорения 
где VXП, VYП, VZП - проекции величины и направления линейной скорости 
ωX, ωY, ωZ - проекции величины и направления угловой скорости объекта 
Проекции ускорения силы тяжести 

Подставив в (1) проекции ускорений, измеряемых и вычисляемых инерциальной навигационной системой, получаем алгоритм контроля







Ф4=ωYП; Ф5=ωXП; Ф6=ωZП;

где Фi, 
Устройство контроля инерциальной навигационной системы 1 содержит датчик 2 крена, датчик 3 тангажа, датчик 4 внутреннего крена, датчик 5 гироскопического курса по осям DD, CC, BB, AA карданова подвеса платформы, датчик 6 вертикальной скорости, датчик 7 северной скорости, датчик 8 западной скорости, а также западный акселерометр 9, северный акселерометр 10, вертикальный акселерометр 11, установленные на платформе в кардановом подвесе, включает первый сумматор 12-1, первый вычитающий вход которого соединен с выходом первого дифференциатора 13-1, второй суммирующий вход - с выходом первого умножителя 14-1, третий вычитающий вход - с выходом второго умножителя 14-2, а выход, через первый компаратор 15-1 - с первым входом схемы 16 ИЛИ. Второй сумматор 12-2 устройства имеет первый вычитающий вход, соединенный с выходом второго дифференциатора 13-2, второй суммирующий вход - с выходом третьего умножителя 14-3, третий вычитающий вход - с выходом четвертого умножителя 14-4, а выход, через второй компаратор 15-2 - с вторым входом схемы 16 ИЛИ. Третий сумматор 12-3 устройства имеет первый вычитающий вход, соединенный с выходом третьего дифференциатора 13-3, второй суммирующий вход - с выходом пятого умножителя 14-5, третий вычитающий вход - с выходом шестого умножителя 14-6, а выход, через третий компаратор 15-3 - с третьим входом схемы 16 ИЛИ. Датчик 2 крена соединен с входами первого синусного 17-1, второго косинусного 17-2 функциональных преобразователей и четвертого дифференциатора 13-4, выходы которых соединены соответственно с первым, вторым входами первого преобразователя координат 18-1 и первым вычитающим входом первой схемы 19-1 вычитания. Датчик 3 тангажа соединен с входами третьего синусного 17-3, четвертого косинусного 17-4 функциональных преобразователей и пятого дифференциатора 13-5, выходы которых соединены соответственно с первым, вторым входами второго преобразователя координат 18-2 и первым вычитающим входом второй схемы 19-2 вычитания. Датчик 5 гироскопического курса соединен с входами пятого синусного 17-5, шестого косинусного 17-6 функциональных преобразователей и шестого дифференциатора 13-6, выходы которых соединены соответственно с первым, вторым входами третьего преобразователя координат 18-3 и первым вычитающим входом третьей схемы 19-3 вычитания. Датчик 4 внутреннего крена соединен с входами седьмого синусного 17-7, восьмого косинусного 17-8 функциональных преобразователей и седьмого дифференциатора 13-7, выходы которых соединены соответственно с первым, вторым входами четвертого преобразователя координат 18-4 и первым вычитающим входом четвертой схемы 19-4 вычитания. Третий, четвертый, пятый входы первого преобразователя координат 18-1 соединены соответственно с датчиком 20 нормальной угловой скорости, датчиком 21 продольной угловой скорости, датчиком 22 поперечной угловой скорости. Третий, четвертый, пятый входы второго преобразователя координат 18-2 соединены соответственно с выходами первой схемы 19-1 вычитания, суммирующий вход которой соединен с третьим выходом первого преобразователя координат 18-1, первый, второй выходы которого соединены соответственно с четвертым, пятым входами второго преобразователя координат 18-2. Третий, четвертый, пятый входы четвертого преобразователя координат 18-4 соединены соответственно с первым, вторым выходами второго преобразователя координат 18-2 и выходом второй схемы 19-2 вычитания, суммирующий вход которой соединен с третьим выходом второго преобразователя координат 18-2. Третий, четвертый, пятый входы третьего преобразователя координат 18-3 соединены соответственно с первым, вторым выходом четвертого преобразователя координат 18-4 и выходом четвертой схемы 19-4 вычитания, суммирующий вход которой соединен с третьим выходом четвертого преобразователя координат 18-4. Первый выход третьего преобразователя координат 18-3 соединен с вторым 14-2 умножителем, пятым 14-5 умножителем, первым интегратором 23-1, выход которого соединен с четвертым суммирующим входом первого сумматора 12-1 и, через четвертый компаратор 15-4 - с четвертым входом схемы 16 ИЛИ. Второй выход третьего преобразователя координат 18-3 соединен с третьим 14-3 умножителем, шестым 14-6 умножителем, вторым интегратором 23-2, выход которого соединен с четвертым вычитающим входом второго сумматора 12-2, и, через пятый компаратор 15-5, с пятым входом схемы 16 ИЛИ. Третий выход третьего преобразователя координат 18-3, через третью схему вычитания 19-3, соединен с первым 14-1 умножителем, четвертым 14-4 умножителем, шестым компаратором 15-6, выход которого подключен к шестому входу схемы 16 ИЛИ. Пятые суммирующие входы первого 12-1, второго 12-2, третьего 12-3 сумматоров соединены соответственно с выходами западного акселерометра 9, северного акселерометра 10, вертикального акселерометра 11. Выход задатчика 24 ускорения силы тяжести соединен с четвертым суммирующим входом третьего сумматора 12-3. Выход схемы 16 ИЛИ является выходом устройства.
Преобразователь координат 18-1, 18-2, 18-3, 1 8-4 содержит последовательно соединенные умножитель 14-7, первый вход которого соединен с первым входом преобразователя координат 18-1, 18-2, 18-3,18-4, сумматор 12-4, второй вход которого соединен с выходом умножителя 14-8, а выход - с первым выходом преобразователя координат 18-1, 18-2, 18-3, 18-4. Последовательно соединены также умножитель 14-9, первый вход которого соединен с вторым входом преобразователя координат 18-1, 18-2, 18-3,18-4, второй вход которого, как и второй вход умножителя 14-7, соединен с третьим входом преобразователя координат 18-1, 18-2, 18-3, 18-4, схема 19-5 вычитания, суммирующий вход которой соединен с выходом умножителя 14-9, вычитающий вход - с выходом умножителя 14-10, а выход - со вторым выходом преобразователя координат 18-1, 18-2, 18-3, 18-4. Четвертый вход преобразователя координат 18-1, 18-2, 18-3, 18-4 соединен с его третьим выходом, а пятый вход - с первыми входами умножителей 14-8, 14-10, вторые входы которых соединены соответственно с вторым и первым входами преобразователя координат 18-1, 18-2, 18-3, 18-4.
Практическая реализация устройства контроля инерциальной навигационной системы возможна на аналоговой и цифровой схемотехнической базе [9-13]. Объектом контроля инерциальной навигационной системы здесь могут быть: ИКВ-1÷8, И-11, МИС, ИКВ-72, И-21, Ц-060-063, 802, Ц-050, ИКВ-95, ИНС-80, ИНС-2000, ИСС-1, 705 и др.; типовые электромеханические датчики угловых скоростей: ДУСУ1, ДУСУ-АС, ДУСУ-М; волоконно-оптические, лазерные: ВГ941-3, ДУСв-5, ДУС-500, ГЛ-2; микромеханические ADIS, ADXRS, ДУС-ММА, входящие в состав типовых систем автоматического управления объектов САУ-10, САУ-451, КСЭИС, СИВПП-В, КСУ-130 пилотажно-навигационных комплексов летательных аппаратов. Реализация алгоритма контроля возможна программными средствами БЦВМ 80-ЗОХХХ или БЦВМ 80-40ХХХ, БЦВМ 90-60ХХХ, БЦВМ-486 [7, 13],
Устройство контроля инерциальной навигационной системы работает следующим образом. Сигнал с выхода датчика 2 крена инерциальной навигационной системы 1, через синусный 17-1 и косинусный 17-2 функциональные преобразователи поступает соответственно на первый и второй входы преобразователя координат 18-1, а через дифференциатор 13-4 - на вычитающий вход схемы 19-1 вычитания. Одновременно, на третий, четвертый, пятый входы преобразователя координат 18-1 поступают сигналы соответственно датчика 20 нормальной угловой скорости, датчика 21 продольной угловой скорости, датчика 22 поперечной угловой скорости объекта. При этом на первом выходе преобразователя координат 18-1 формируется сигнал, пропорциональный угловой скорости дополнительной рамы ДР по оси XД

на втором выходе - по оси ZД

а на третьем выходе - по оси XД дополнительной рамы ωX, который поступает на суммирующий вход схемы 19-1 вычитания. На выходе схемы вычитания получается сигнал, пропорциональный угловой скорости 




на втором выходе - по оси YН,

а на третьем выходе - по оси XН наружного кольца 




на втором выходе - по оси ZВ,

а на третьем выходе - по оси YВ наружного кольца 




на втором выходе - по оси XП

а на третьем выходе - по оси ZВ внутреннего кольца 
















Преобразователи координат 18-1, 18-2, 18-3, 18-4 работают следующим образом. Сигнал X1, на первом входе преобразователей координат 18-1, 18-2, 18-3, 18-4, пропорциональный sin углов крена, тангажа, внутреннего крена, гироскопического курса, поступает на первый вход умножителя 14-7 и второй вход умножителя 14-10. Одновременно, сигнал X2, на втором входе преобразователей координат 1 8-1, 18-2, 18-3, 1 8-4, пропорциональный cos углов крена, тангажа, внутреннего крена, гироскопического курса, поступает на второй вход умножителя 14-8 и первый вход умножителя 14-9. На вторые входы умножителя 14-7 и умножителя 14-9 поступает сигнал X3 с третьего входа преобразователей координат 1 8-1, 18-2, 18-3, 18-4, а на первые входы умножителя 14-8 и умножителя 14-10 с пятого входа. На первом выходе преобразователей координат 18-1, 18-2, 18-3, 18-4, с выхода сумматора 12-4, получается сигнал Y1=X3X1+X5X2, на втором выходе - со схемы 19-5 вычитания, получается сигнал Y2=X3X2-X5X1. На третий выход преобразователей координат 18-1, 18-2, 18-3, 18-4 сигнал с четвертого входа поступает без изменения так, что Y3=X4. В результате преобразователи координат 18-1, 18-2, 18-3, 18-4 реализуют вычисления (2)-(5) угловых скоростей элементов карданова подвеса и платформы в алгоритме контроля (9).
Таким образом, для заявляемого устройства контроля инерциальной навигационной системы отсутствуют отмеченные ранее недостатки аналогов и прототипа. Устройство способно контролировать работоспособность большого числа именно платформенных инерциальных навигационных систем классической схемы (фиг.3): ИКВ-1÷8, И-11, МИС, ИКВ-72, И-21, Ц-050, ИНС-80, Ц-060÷063, 802, ИКВ-95, ИНС-2000, ИСС-1, 705, SKN-2440, LN-39, FIN-1010, AN/ASN-109 и др. на наземных, воздушных, космических маневренных объектах в предполетном и полетном режиме работы. Аппаратно безызбыточный контроль использует оборудование, входящее в состав типового пилотажно-навигационного комплекса объекта. От аппаратно затратного контроля при дублировании или троировании крайне дорогостоящих проверяемых датчиков, как отмечено в аналогах, в заявляемом устройстве сделан переход к информационно затратному безынерционному контролю. Наивысшая информационная производительность контроля заявляемого устройства 
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполняются следующие условия:
средство, воплощающее устройство-изобретение при его осуществлении, предназначено для использования в транспортной, авиационной и космической технике и, в частности, для комплексного контроля инерциальных навигационных систем беспилотных, пассажирских и транспортных самолетов. Оно может использоваться для определения исправности самолета в полете и на стадии его предполетной проверки;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности „промышленная применимость”.
Источники информации
1. Боднер В.А. Системы управления летательными аппаратами. М.: Машиностроение, 1973, 506 с.
2. Вульфов А. Широкофюзеляжные „ИЛЫ” // Авиация и космонавтика, №1, 2 2002.
3. Голинкевич Т.А. Оценка надежности радиоэлектронной аппаратуры. М.: Советское радио, 1969. 176 с.
4. Сейдж Э.П., Уайт Ч.С. Оптимальное управление системами. М.: Радио и связь, 1982. 392 с.
5. Дмитриев С.П., Колесов Н.В., Осипов А.В. Информационная надежность, контроль и диагностика навигационных систем. СПб.: ГНЦ РФ-ЦНИИ Электроприбор, 2003, 207 с.
6. Крюков С.П., Чесноков Г.И., Троицкий В.А. Опыт разработки и сертификации бесплатформенной инерциальной навигационной системы для гражданской авиации и создания на ее основе модификаций для управления движением морских, наземных и аэрокосмических объектов, задач геодезии и гравиметрии // Гироскопия и навигация. 2002. №4 (39), С.115-124.
7. Авионика России: Энциклопедический справочник. / Под общ. ред. С.Д. Бодрунова. СПб.: Национальная Ассоциация авиаприборостроителей, 1999 г., С.341.
8. Ишлинский А.Ю. Механика относительного движения и силы инерции. М.: Наука, 1981.191 с.
9. Воробьев В.Г., Глухов В.В, Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. С.360, 371.
10. Бочкарев A.M., Струков Ю.П. Бортовое радиоэлектронное оборудование летательных аппаратов. // Итоги науки и техники. ВИНИТИ. Сер. Авиастроение. 1990, С.27.
11. Аналоговые и цифровые интегральные микросхемы: Справочное пособие / С.В.Якубовский, Н.А. Барканов, Л.И. Ниссельсон и др. / Под ред.С. В. Якубовского. М.: Радио и связь, 1984 г., с.432.
12. Смолов В.Б. Функциональные преобразователи информации. Л.: Энергоиздат, 1981. с.248.
13. Системы управления вооружением истребителей: Основы интеллекта многофункционального самолета / РАРАН. /Под ред. Е.А. Федосова. М., Машиностроение, 2005, 400 с.
Изобретение относится к области комплексного контроля инерциальных навигационных систем управления подвижными объектами и, в частности, к средствам аппаратурно безызбыточного контроля систем ориентации и навигации беспилотных и дистанционно пилотируемых летательных аппаратов повышенной информационной производительности. Техническим результатом является повышение эффективности контроля при выполнении полетных задач. Устройство содержит датчики угловых скоростей по осям объекта, преобразователи координат, функциональные преобразователи, сумматоры, схемы вычитания, дифференциаторы, умножители, интеграторы, задатчик ускорения силы тяжести и компараторы, соединенные так, что выходные сигналы сумматоров сравниваются с пороговыми значениями оценок точности измеренных и вычисленных ускорений. Устройство контроля одновременно измеряет и сравнивает кажущиеся и абсолютные ускорения объекта. Для этого производится измерение абсолютных угловых, линейных скоростей объекта датчиками угловых скоростей и датчиками скоростей инерциальной системы. Отличие оценок ускорений от их измеренных значений на компараторах устройства служит для фиксации отказа инерциальной навигационной системы. 1 з.п. ф-лы, 4 ил.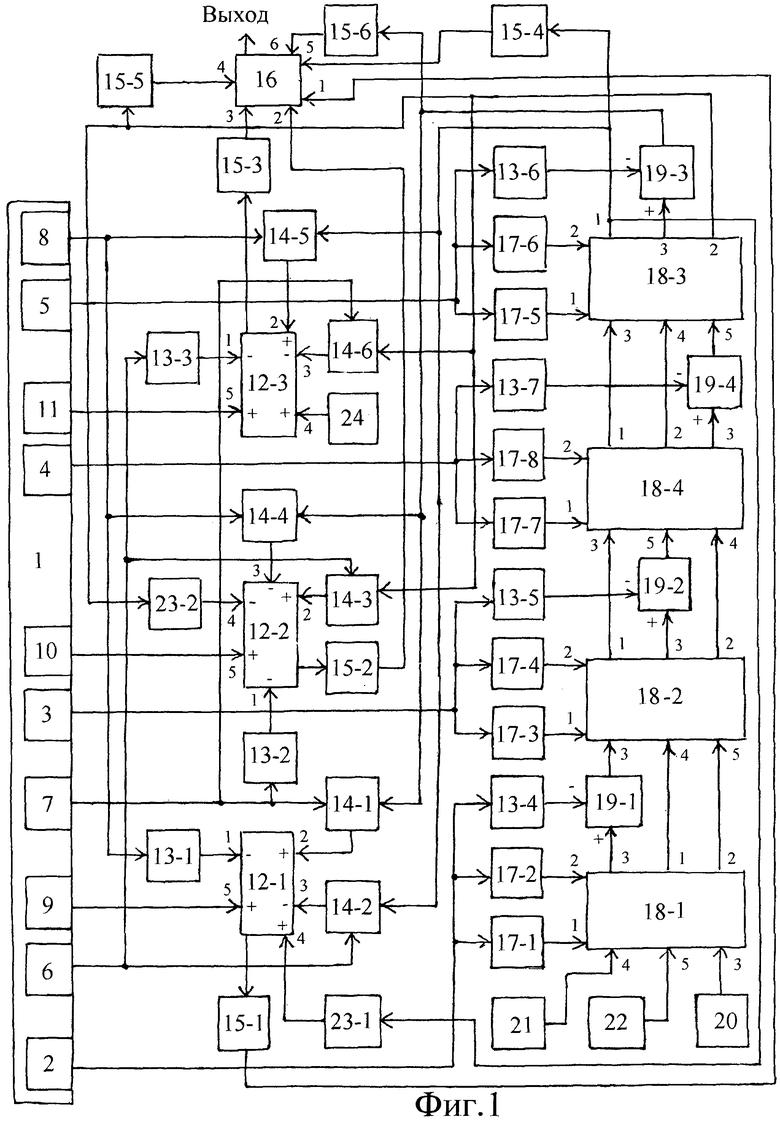
1. Устройство контроля инерциальной навигационной системы, содержащее датчик продольной угловой скорости, датчик нормальной угловой скорости, датчик поперечной угловой скорости, первый сумматор, первый вычитающий вход которого соединен с выходом первого дифференциатора, второй суммирующий вход - с выходом первого умножителя, третий вычитающий вход - с выходом второго умножителя, а выход, через первый компаратор - с первым входом схемы ИЛИ, второй сумматор, первый вычитающий вход которого соединен с выходом второго дифференциатора, второй суммирующий вход - с выходом третьего умножителя, третий вычитающий вход - с выходом четвертого умножителя, а выход, через второй компаратор - с вторым входом схемы ИЛИ, третий сумматор, первый вычитающий вход которого соединен с выходом третьего дифференциатора, второй суммирующий вход - с выходом пятого умножителя, третий вычитающий вход - с выходом шестого умножителя, а выход, через третий компаратор - с третьим входом схемы ИЛИ, датчик крена, выход которого соединен с входами первого и второго функциональных преобразователей, выходы которых подключены соответственно к первому и второму входам первого преобразователя координат, датчик тангажа, выход которого соединен с входами третьего и четвертого функциональных преобразователей, выходы которых подключены соответственно к первому и второму входам второго преобразователя координат, датчик гироскопического курса, выход которого соединен с входами пятого и шестого функциональных преобразователей, выходы которых подключены соответственно к первому и второму входам третьего преобразователя координат, датчик вертикальной скорости, датчик северной скорости, датчик западной скорости, отличающееся тем, что в него введены четвертый преобразователь координат, первая, вторая, третья, четвертая схемы вычитания, первый, второй интеграторы, четвертый, пятый, шестой, седьмой дифференциаторы, четвертый, пятый, шестой компараторы, седьмой, восьмой функциональные преобразователи, задатчик ускорения силы тяжести, западный акселерометр, северный акселерометр, вертикальный акселерометр, датчик внутреннего крена, выход которого, через седьмой и восьмой функциональные преобразователи, соединен соответственно с первым и вторым входами четвертого преобразователя координат, третий, четвертый, пятый входы первого преобразователя координат соединены соответственно с датчиком нормальной угловой скорости, датчиком продольной угловой скорости, датчиком поперечной угловой скорости, третий вход второго преобразователя координат соединен с выходом первой схемы вычитания, вычитающий вход которой, через четвертый дифференциатор, подключен к датчику крена, четвертый и пятый входы - соответственно к первому и второму выходам первого преобразователя координат, суммирующий вход первой схемы вычитания соединен с третьим выходом первого преобразователя координат, третий и четвертый входы четвертого преобразователя координат соединены соответственно с первым и вторым выходами второго преобразователя координат, пятый вход - с выходом второй схемы вычитания, вычитающий вход которой, через пятый дифференциатор, подключен к датчику тангажа, суммирующий вход второй схемы вычитания соединен с третьим выходом второго преобразователя координат, третий и четвертый входы третьего преобразователя координат соединены соответственно с первым и вторым выходами четвертого преобразователя координат, пятый вход - с выходом четвертой схемы вычитания, вычитающий вход которой, через седьмой дифференциатор, подключен к датчику внутреннего крена, суммирующий вход четвертой схемы вычитания соединен с третьим выходом четвертого преобразователя координат, первый выход третьего преобразователя координат, через первый интегратор, соединен с четвертым суммирующим входом первого сумматора, входами второго, пятого умножителей и, через четвертый компаратор, с входом схемы ИЛИ, второй выход третьего преобразователя координат, через второй интегратор, соединен с четвертым вычитающим входом второго сумматора, входами третьего, шестого умножителей и, через пятый компаратор, с входом схемы ИЛИ, третий выход третьего преобразователя координат соединен с суммирующим входом третьей схемы вычитания, вычитающий вход которой, через шестой дифференциатор, соединен с датчиком гироскопического курса, выход третьей схемы вычитания соединен с первым, четвертым умножителями и, через шестой компаратор, с входом схемы ИЛИ, задатчик ускорения силы тяжести соединен с четвертым суммирующим входом третьего сумматора, датчик вертикальной скорости соединен с входами второго, третьего умножителей и третьего дифференциатора, датчик северной скорости соединен с входами первого, шестого умножителей и второго дифференциатора, датчик западной скорости соединен с входами четвертого, пятого умножителей и первого дифференциатора, выходы вертикального акселерометра, северного акселерометра, западного акселерометра соединены с пятыми суммирующими входами соответственно третьего, второго, первого сумматоров, выход схемы ИЛИ является выходом устройства.
2. Устройство контроля инерциальной навигационной системы по п.1, отличающееся тем, что преобразователь координат содержит последовательно соединенные седьмой умножитель, первый вход которого соединен с первым входом преобразователя координат, четвертый сумматор, второй вход которого соединен с выходом восьмого умножителя, а выход - с первым выходом преобразователя координат, последовательно соединенные девятый умножитель, первый вход которого соединен с вторым входом преобразователя координат, второй вход, как и второй вход седьмого умножителя, соединен с третьим входом преобразователя координат, пятая схема вычитания, суммирующий вход которой соединен с выходом девятого умножителя, вычитающий вход - с выходом десятого умножителя, а выход - со вторым выходом преобразователя координат, четвертый вход преобразователя координат соединен с его третьим выходом, пятый вход - с первыми входами восьмого и десятого умножителей, вторые входы которых соединены соответственно с вторым и первым входами преобразователя координат.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |

