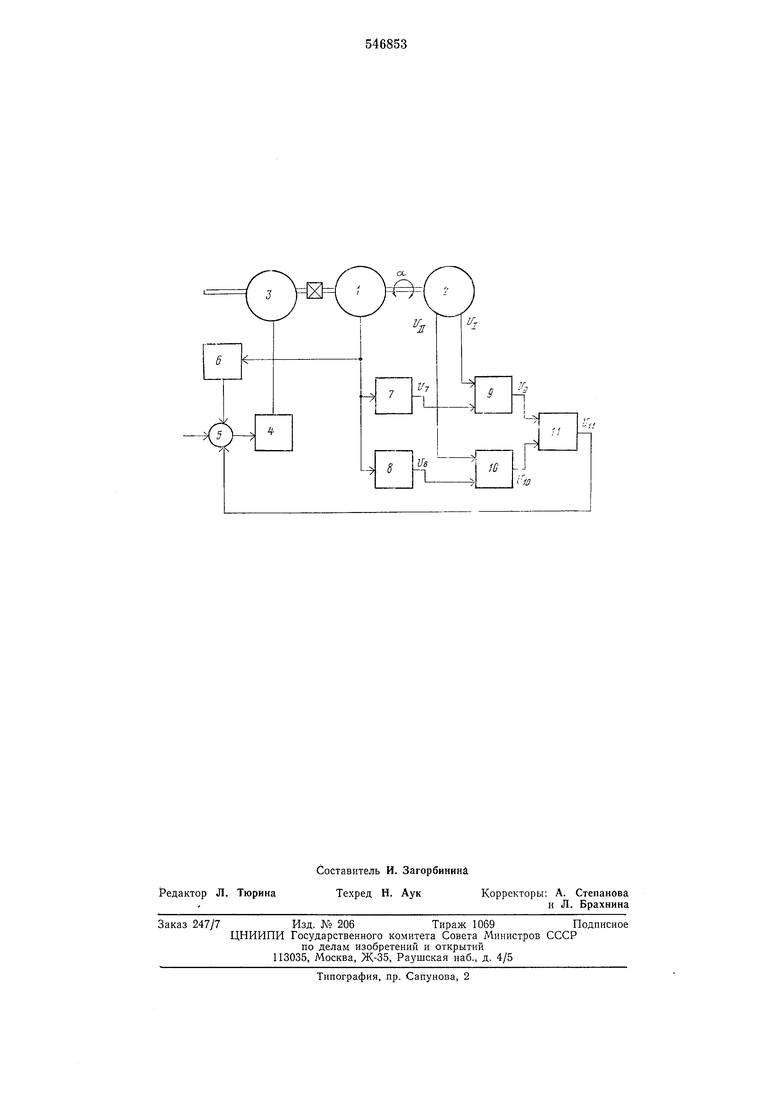
один вход которого через преобразователь кода в напряжение 6 соединен с выходом датчика угла. Входы функциональных преобразователей кода в напряжения 7 и 8 подключены к выходу датчика угла 1, а их выходы - к одним входам множительных устройств 9 н 10, другие входы которых соединены с выходами синхронного генератора 2. Выходы множительных устройств подключены ко входам сум-. матора 11, выход которого соединен с другим входом элемента сравнения 5. При подаче на элемент сравнения управляющего сигнала привод приводится во вращение. Сигналы с выхода датчика угла 1 в виде цифрового кода поступают на входы двух функциональных преобразователей кода в напряжение 7 и 8, которые формируют напряжения, пропорциональные синусу и косинусу угла а (а - угол поворота вала датчика угла): , и icosz соответственно, где Ui - напряжение питания. Эти напряжения подаются на соответствующие множительные устройства, на которые подаются синфазные с напряжениями Uf и Us напрял ения синхронного генератора 2: и Uu K - cosy.. dtdt На выходах множительных устройств 9 и 10 получают напряжения вида и, Ки, - sin а; и,, Ки, - . dtdt На выходе сумматора 11 образуются напряженияи,, и, + и,, ки,х Х( sin а + cos ос Ки, - . }dt Величина полученного напряжения постоянного тока пропорциональна мгновенному значению угловой скорости, а полярность напряжения определяется направлением (знаком) скорости. Это напряжение не содержит низкочастотных пульсаций и поэтому может быть использовано для демпфирования привода, для чего оно подается на один из входов элемента сравнения 5. На другой его вход через преобразователь ко/та в напряжение 6 подается сигнал угловой обратной связи, снимаемый с датчика угла 1. Использование в качестве датчика скорости синхронного генератора, не имеющего нулевой зоны и остаточного напряжения, а также отсутствие низкочастотных пульсаций на выходе сумматора позволяет повысить чувствительность демпфирующей цепи и тем самым расширить диапазон регулирования. Формула изобретения Следящий привод, содержащий датчик угла, вал которого соединен с синхронным генератором и кинематически связан с исполнительным двигателем, подключенным через усилитель к выходу элемента сравнения, один вход которого через преобразователь кода в напряжение соединен с выходом датчика угла, о тличающийся тем, что, с целью расширения диапазона регулирования, в него введены множительные устройства, сумматор и функциональные преобразователи кода в напряжение, входы которых подключены к выходу датчика угла, а выходы - к одним входам множительных устройств, другие входы которых соединены с выходами синхронного генератора, выходы множительных устройств подключены ко входам сумматора, выход которого соединен с другим входом элемента сравнения. Источники информации, принятые во внимание при экспертизе; 1.Блейз Е. С. и др. Динамика электромашинных следящих систем, М., Энергия, 1967, с. 78. 2.Авторское свидетельство СССР Яд 253226 М. Кл.2 Н 02Р 5/34, 18.03.67.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод | 1978 |
|
SU773884A1 |
| Бесконтактный реверсивный тахогенератор постоянного тока | 1976 |
|
SU552663A1 |
| Следящий электропривод | 1983 |
|
SU1095337A1 |
| Устройство для формирования опорных сигналов управления синхронным двигателем | 1985 |
|
SU1319225A1 |
| Измеритель скорости вращения | 1979 |
|
SU800882A1 |
| Преобразователь углового положения вала в напряжение | 1975 |
|
SU548762A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
| Устройство для измерения угловых ускорений | 1975 |
|
SU546823A1 |
| Электрический генератор | 1986 |
|
SU1372515A1 |
| Устройство для управления тиристорным выпрямителем | 1982 |
|
SU1069120A1 |