Изобретение относится к электротехнике, в частности к моментным электродвигателям постоянного тока с ограниченным углом поворота ротора, и может быть использовано в прецизионных электроприводах, от которых требуется повышенный ресурс при работе на подвижном основании.
Известен моментный электродвигатель постоянного тока с ограниченным углом поворота ротора, содержащий электромеханический преобразователь и систему управления. Электромеханический преобразователь состоит из ротора-индуктора с числом пар полюсов более одного и статора с обмотками управления, размещенными на
четырех секторах. Система управления содержит задатчик момента, два датчика линейных ускорений и четыре канала формирования якорных токов, каждый из которых состоит из сумматора, усилителя мощности и датчика тока.
Недостатками известного двигателя являются низкие надежность и плавность хода, связанные с тем, что его опоры вращения работают в нагруженном режиме под воздействием сил, возникающих в результате того, что центр масс узлов, размещенных на валу двигателя, не лежит в плоскости поперечного сечения, проходящей через середины активных элементов двигателя.
VI СП VJ
О
со
00
Наиболее близким к предлагаемому по функциональным и конструктивным признакам является моментный электродвигатель постоянного тока с ограниченным углом поворота ротора, содержащий два электромеханических преобразователя, размещенных на одном валу, восемь каналов формирования якорных токов, пять масштабных преобразователей, два датчика линейных ускорений и задатчик момента.
Недостатками известного двигателя являются низкие надежность и плавность хода, связанные с тем, что его опоры вращения работают в нагруженном режиме под воздейстием сил, создаваемых внешни- ми моментами, которые возникают в результате наличия угловых ускорений и скоростей вокруг поперечных осей.
Целью изобретения является повышение надежности и плавности хода при со- хранении положения оси ротора относительно статора и при минимуме потерь в обмотках якоря путем создания электромагнитных сил, разгружающих опоры вращения от радиальных усилий,
Указанная цель достигается feM, что в моментный электродвигатель постоянного тока с ограниченным углом поворота ротора, содержащий два электромеханических преобразователя, роторы-индукторы кото- рых размещены на одном вёлу, а якорные обмотки каждого расположены на четырех секторах и соединены с восемью каналами формирования якорных токов, каждый из которых состоит из сумматора, датчика тока и усилителя мощности, выход сумматора соединен с неинвертирующим входом усилителя мощности, а с его инвертирующим входом соединен выход датчика тока, через вход которого к выходу усилителя мощности подключена фаза якорной обмотки, первые неинвертирующие входы сумматоров всех восьми каналов соединены с выходом первого масштабного преобразователя с коэффициентом преобразования 1/8Rc. где R - средний радиус воздушного зазора электромеханического преобразователя, с - коэффициент, связывающий ток сектора якорной обмотки с электромагнитной силой этого сектора, вторые неинвертирующие входы сумматоров первых, вторые инвертирующие входы сумматоров третьих каналов формирования якорных токдв первого и второго электромеханических преобразователей соединены с выходами второго и четвертого масштабных преобразователей соответственно, вторые инвертирующие входы сумматоров вторых, вторые неинвертирующие входы сумматоров четвертых каналов формирования якорных токов
первого и второго электромеханических преобразователей соединены с выходами третьего и пятого масштабных преобразователей соответственно, два датчика линей- ных ускорений размещены на одном основании со статором так, что ось первого датчика параллельна осям второго и четвертого секторов, а ось второго датчика параллельна осям первого и третьего секторов, введены задатчики угловой скорости и углового ускорения роторов электромеханических преобразователей, синусно- косинусный преобразователь угла, механически соединенный с валом роторов, три датчика угловых ускорений и три датчика угловых скоростей потрем взаимно ортогональным осям, семнадцать перемножителей, пятнадцать сумматоров и десять масштабных преобразователей, оси первых и вторых датчиков угловых скоростей и ускорений параллельны осям первого и второго датчиков линейных ускорений соответственно, ось третьих датчиков угловых скоростей и ускорений параллельны оси вала ротора, синусный и косинусный выходы синусно-косинусного преобразователя угла соединены с первыми входами второго, третьего, пятого, восьмого, пятнадцатого, семнадцатого и первого, четвертого, шестого, седьмого, четырнадцатого, шестнадцатого перемножителей соответственно, вторые входы перемножителей первого, второго и третьего, четвертого соединены с выходами первого и второго датчиков угловых скоростей соответственно, вторые входы перемножителей третьего, четвертого и пятого, шестого, соединены с выходами второго и Первого датчиков угловых ускорений соответственно,выход задатчика угловой скорости соединен с первыми входами десятого, двенадцатого перемножителей и первого дополнительного сумматора, второй вход которого соединен с выходом третьего датчика угловой скорости, выходы зздатчика углового ускорения и третьего дЗтчика углового ускорения соединены с первым и вторым входами соответственно шестого дополнительного сумматора, выходы третьего, пятого и четвертого, шестого перемножителей соединены с первыми инвертирующими входами второго, четвертого и с первыми неинвертирующими входами третьего, пятого дополнительных сумматоров соответственно, выходы первого, второго, седьмого и восьмого перемножителей соединены со вторыми неинвертирущими входами второго, третьего, четвертого и пятого дополнительных сумматоров соответственно, выход первого дополнительного сумматора соединен с
первыми входами девятого и тринадцатого, перемножителей, выход второго дополнительного сумматора соединен со вторыми входами девятого, десятого и с первым входом одиннадцатого перемножителей, выход третьего дополнительного сумматора соединен со вторыми входами одиннадцатого, двенадцатого и тринадцатого перемножителей, выход десятого перемножителя соединен с третьим неинвертирующим входом пятого дополнительного сумматора, а выход двенадцатого перемножителя соединен с третьим инвертирующим входом четвертого дополнительного сумматора, выходы девятого, одиннадцатого и тринадцатого перемножителей через дополнительные масштабные преобразователи, первый, второй и третий, с коэффициентами преобразования (lHz - 1ку), (у - нх) и (1НХ - иг) соответственно, где нх, ну, нг - моменты инерции нагрузки относительно главных осей эллипсоида инерции нагрузки Хн. YH, ZH соединены с первыми входами седьмого, десятого и восьмого дополнительных сумматоров соответственно, вторые входы этих сумматоров через пятый, шестой и четвертый дополнительные масштабные преобразователи с коэффициентам преобразования нх, Н2 и ну соответственно соединены с выходами пятого, шестого и четвертого дополнительных сумматоров, соответственно выходы седьмого и восьмого дополнительных сумматоров соединены со вторыми входами четырнадцатого, пятнадцатого и шестнадцатого, семнадцатого перемножителей соответственно, выходы четырнадцатого и шестнадцатого перемножителей соединены с первыми неинвертирующими входами девятого и одиннадцатого дополнительного сумматоров, а выходы пятнадцатого и семнадцатого перемножителей соединены со вторым неинвертирующим И вторым инвертирующим входами одиннадцатого и девятого дополнительных сумматоров соответственно, выход девятого дополнительного сумматора соединен с первым инвертирующим входом двенадцатого и первым неинвертирующим входом четырнадцатого дополнительных сумматоров, а выход одиннадцатого дополнительного сумматора с первым неинвертирующим входом тринадцатого и первым инвертирующим входом пятнадцатого дополнительных сумматоров, выход первого датчика линейных ускорений через седьмой и девятый дополнительные масштабные преобразователи с коэффициентами преобразования mln и mli, где т - масса нагрузки, а Ј| и Си - расстояния по оси вращения от центра масс нагрузки до середины активных зон первого и второго электромеханических преобразователей соответственно соединен со вторыми неинвертирующими входами двенадцатого и
четырнадцатого дополнительных сумматоров соответственно, выход второго датчика линейных ускорений через восьмой и десятый дополнительные масштабные преобразователис коэффициентами
преобразования и mli соответственно, соединен со вторыми неинвертирующими входами тринадцатого и пятнадцатого дополнительных сумматоров, выходы двенадцатого, тринадцатого, четырнадцатого и
пятнадцатого дополнительных сумматоров соединены со вторым, третьим, четвертым и пятым основными масштабными преобразователями соответственно с коэффициентами преобразования 1 /2с(й + fii) у каждого,
выход десятого дополнительного сумматора соединен с перывм основным масштабным преобразователем.
Благодаря введению в моментный электродвигатель постоянного тока шести
датчиков угловых скоростей и ускорений, задатчиков угловой скорости и углового ускорения вала, синусно-косинусного преобразователя угла и соответствующей системы управления, во всех восьми каналах формируются оптимальные якорные токи при минимуме потерь в якорных обмотках электромеханических преобразователей, которые создают требуемый момент и разгружают ОТпоры вращения от
внешних радиальных сил, которые являются составляющими моментов вокруг поперечных осей двигателя и образованы угловыми скоростями и ускорениями, действующими на двигатель.
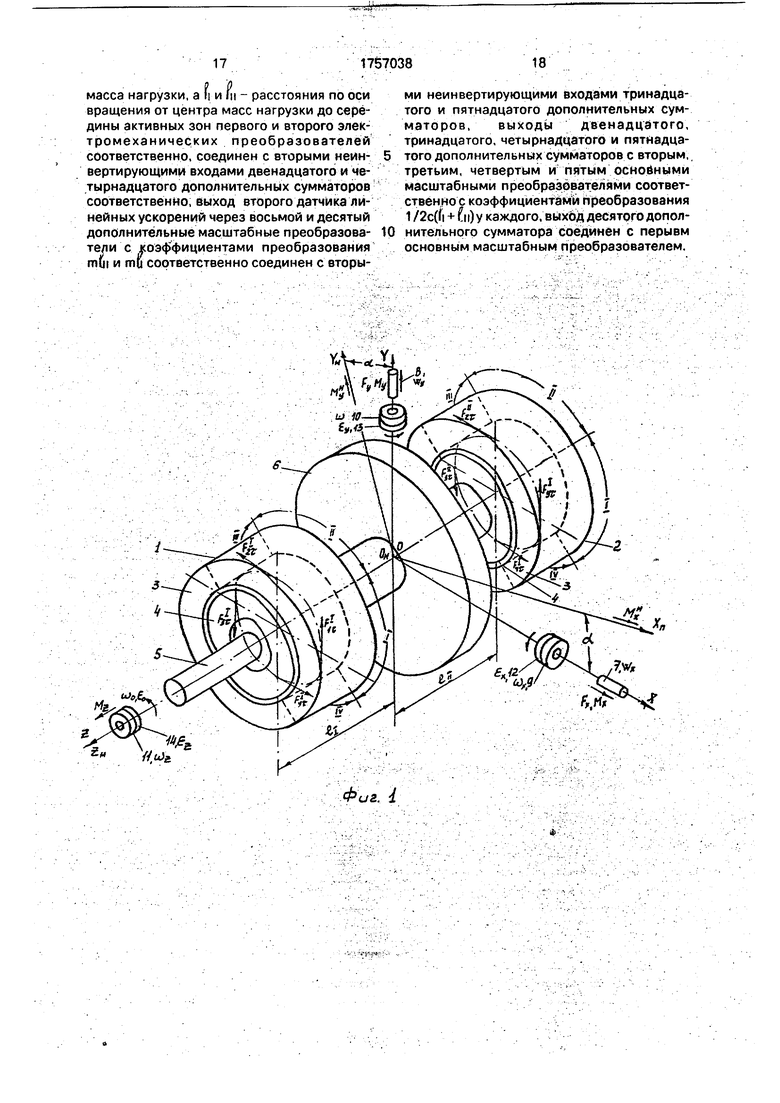
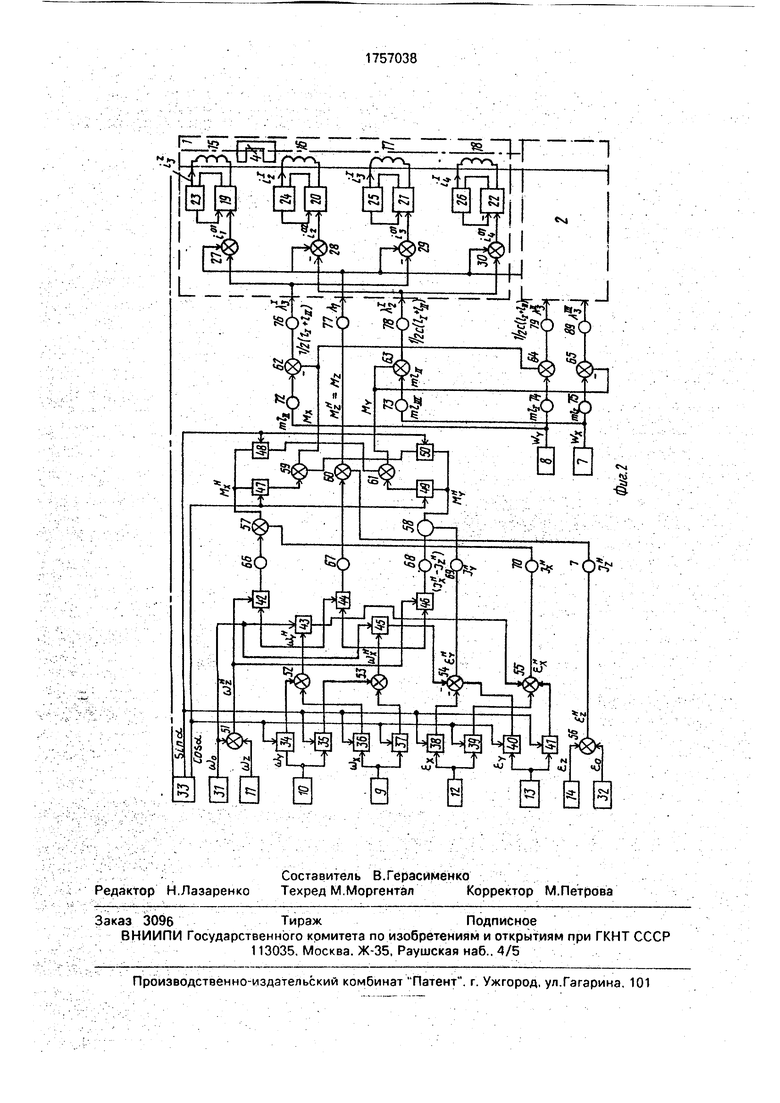
На фиг. 1 представлена кинематическая схема расположения двух электромеханических преобразователей (ЭМП) и нагрузки; на фиг. 2 - функциональная схема моментного электродвигателя постоянного
тока (МДПТ). Электродвигатель содержит электромеханические преобразователи (ЭМП) 1 и 2, статоры 3 ЭМП ; роторы-индукторы 4 ЭМП; вал 5 ЭМП; нагрузку 6 электродвигателя; датчики 7 и 8 линейных
ускорений по осям X и Y; датчики 9-11 угловых скоростей но осям X, Y и Z; датчики 12-14 угловых ускорений по осям X, Y и Z; якорные обмотки 15-18 ЭМП 1; усилители 19-22 мощности; датчики 23-26 тока; сумматоры 27-30, 51-65; задатчики угловой скорости 31 и углового ускорения 32, синусно-косинусный преобразователь 33 угла; перемножители 34-50; масштабные преобразователи 66-80.
Оба ЭМП 1 и 2 (фиг. 1) состоят из статоров 3 и роторов-индукторов 4, которые размещены на одном валу 5 с нагрузкой 6 между ними. Центр масс вала 5 и всех узлов, размещенных на нем, расположен в точке О и совпадает с центром неподвижной относительно основания и статоров 3 ЭМП системы координат X. Y, Z, ось Z которой совпадает с осью вала 5. Имеется система координат Хн, YH и ZM, центр которой Он и ось ZM совпадают с центром О и осью Z неподвижной системы координат, а оси X и Y - совпадают с главными осями эллипсоида инерции нагрузки 6. По осям X, Y и Z расположены датчики линейных ускорений а) х - 7, (о у - 8 датчики угловых скоростей и ускорений о) х - 9,ш у - 10, o)z 11 и е х - 12, ЕУ - 13 ,е z - 14. Статоры 3 каждого ЭМП разделены на четыре равных сектора I-IV таким образом, что оси I и III секторов параллельны оси X, а оси II и IV секторов параллельны оси Y. На осях этих секторов показаны векторы электромагнитных тангенциальных сил Fk , где k и j - порядковые номера секторов и ЭМП соответственно (k 1,2,3,4, J I, II). Расстояния от плоскостей, проходящих через середины активных зрн каждого ЭМП до начала координат - fi и in соответственно. По осям X и Y показаны положительные направления радиальных усилий ротора на опоры вращения FX и Fy и положительные направления моментов, действующих на опоры вращения вокруг этих осей Мх и My. По осям Хн и YH показаны положительные направления моментов нагрузки Мнх и Мну. действующих на опоры вращения.
Каждый из ЭМП 1.2, входящих в МДПТ, имеет якорные обмотки 15-18, размещенные на четырех секторах статоров (фиг. 2). Усилители мощности 19-22 вместе с датчиками тока 23-26 и сумматорами 27-30 образуют четыре канала формирования якорных токов обмоток 15-18 каждого ЭМП. МДПТ содержит задатчики угловой скорости вращения вала 31 () и углового ускорения 32 (Р о), синусно-косинусный преобразователь угла 33. Система управления МДПТ состоит из семнадцати перемножителей 34-50, пятнадцати сумматоров 51-65 и пятнадцати масштабных преобразователей 66-80.
Роторы-индукторы 4 каждого ЭМП механически соединены с ротором синусно- косинусного преобразователя угла 33, синусный и косинусный выходы которого подключены к первым входам перемножителей 35,36,38,41,48.50 и 34,37,39,40, 47. 49 соответственно. Ко вторым входам перемножителей 34 и 35, 36 и 37, 38 и 39,40 и 41
подключены выходы датчиков угловых скоростей 10 (ш у), 9 (и х) и угловых ускорений 12 (ех), 13 (е у) соответственно. Выход задат- чика угловой скорости 31 (о)0) подключен к
первым входам перемножителей 43, 45 и сумматора 51. Ко второму входу сумматора 51 подключен выход датчика угловой скорости 11 ((л)г). Выходы задатчика углового ускорения 32 (е о) и датчика углового ускорения 14 (ez) подключены ко входам сумматора 56. Выходы перемножителей 36, 38 и 37, 39 подключены к первым инвертирующим входам сумматоров 52, 54 и к первым неинвертирующим входам сумматоров 53,
55 соответственно. Выходы перемножите- лей 34, 35, 40 и 41 подключены ко вторым неинвертирующим входам сумматоров 52,
53,54 и 55 соответственно. Выход сумматора 51 подключен к первым входам перемножителей 42 и 46. Выход сумматора 52 подключен ко вторым входам перемножителей 42.43 и к первому входу перемножителя 44. Выход сумматора 53 подключен ко вто-. рым входам перемножителей 44, 45 и 46.
Выход перемно ителя 45 подключен к третьему инвертирующему входу сумматора
54,а выход перемножителя 43 - к третьему неинвертирующему входу сумматора 55. Выходы перемножителей 42, 44 и 46 через
масштабные преобразователи 66, 67 и 68 с коэффициентами преобразования (IHZ - tHy), (1ну - нх) и (Гх - IHZ) соответственно, где Гх. 1ну, 1нг - моменты инерции нагрузки относительно главных осей нагрузки эллипсоида
инерции Хн, YH и ZH, подключены к первым вхбдам сумматоров 57, 60 и 58 соответственно. Выходы сумматоров 55,56 и 54 через масштабные преобразователи 70, 71 и 69 с коэффициентами преобразования IHX, IHZ и
|ну соответственно подключены ко вторым входам сумматоров 57, 60 и 58 соответственно. Выходы сумматоров 57 и 58 подключены ко вторым входам перемножителей 47, 48 и 49, 50 соответственно. Выходы перемножителей 47 и 49 подключены к первым неинвертирующим входам сумматоров 59 и 61, а выходы перемножителей 48 и 50 подключены ко вторым неинвертирующему и инвертирующему входам сумматоров 61 и
59 соответственно. Выход сумматора 59 подключен к первому инвертирующему входу сумматора 62 и к перйому неинвертирующему входу сумматора 64, а выход сумматора 61 подключен к первому неинвертирующему входу сумматора 63 и к первому инвертирующему входу сумматора 65. Выход датчика линейных ускорений 8 (а у) через масштабные преобразователи 72 и 74, с коэффициентами преобразования mfn и
mil соответственно, где m - масса нагрузки, a ti и (и - расстояния по оси вращений 6т центра масс нагрузки до середины активных зон первого и второго ЭМП соответственно, подключен ко вторым неинвертирующим входам сумматоров 62 и 64 соответственно. Выход датчика линейных ускорений 7 (ft) х) через масштабные преобразователи 73 и 75 с коэффициентом преобразования mlii и mil соответственно, подключен ко вторым неинвертирующим входам сумматоров 63 и 65 соответственно. Выход сумматора 60 через масштабный преобразователь 77 с коэффициентом преобразования 1 /8Rc, где R - средний радиус воздушного зазора ЭМП, с - коэффициент, связывающий ток сектора якорной обмотки с электромагнитной силой этого сектора, подключен к первым неинвертирующим входам сумматоров 27, 28, 29, 30 четырех каналов формирования якорных токов первого ЭМП и к первым входам идентичных каналов формирования якорных токов второго ЭМП. Выходы сумматоров 62 и 64 через масштабные преобразователи 76 и 79 с коэффициентом преобразования 1/2c(ti + lit) каждый, подключены ко второму неинвертирующему входу сумматора 27 первого канала формирования якорных токов, ко второму инвертирующему входу сумматора 29 третьего канала формирования якорных токов первого ЭМЛ и к идентичным входам каналов формирования якорных токов второго ЭМП соответственно. Выходы сумматоров 63 и 65 через масштабные преобразователи 78 и 8,0, с коэффициентом преобразования 1/2c(ft + in) каждый, подключены ко второму инвертирующему входу сумматора 28 второго канала формирования якорных токов, ко второму неинвертирующему входу сумматора 30 четвертого канала формирования якорных токов первого ЭМП и к идентичным входам каналов формирования якорных токов второго ЭМП соответственно. Четыре канала формирования якорных токов первого ЭМП образованы сумматорами 27-30 усилителями мощности 19-22 и датчиками тока 23-26 и подключены к якорной обмотке следующим образом. Выходы сумматоров 27-30 подключены к первым неинвертирующим входам усилителей мощности 19-22 соответственно, выходы которых соединены с четырьмя секторами якорной обмотки 15-18 через датчики тока 23-26, выходы которых подключены ко вторым инвертирующим входам усилителей мощности 19-22 соответственно. Идентично спроектированы четыре канала формирования якорных токов второго ЭМП.
МДПТ работает следующим образом.
Датчики угловых скоростей 9, 10, 11 и угловых ускорений 12,13,14 вырабатывают сигналы, пропорциональные угловым скоростям ft) x,ft у, ft) z и угловым ускорени- ям Ју, Ју, Јz соответственно. Эти сигналы совместно с сигналами, вырабатываемыми задатчик-ами требуемой угловой скорости вала 31 - ft) 0 и требуемого углового ускорения вала 32-е о и сигна- 0 лами синусно-косинусного преобразователя угла 33, проходя через перемножители 34-41 и сумматоры 51-56, формируют на выходе последних сигналы, пропорциональные , ft) н y,ft/ Hz, Ј нх, Ј vHj Ј i r B результате решения 5 системы уравнении
G)HX ftjxcos a+ ft) ysina,
У - ftksin а+ ш ycos a .
ft)Hz - О) г + О) о ,(1)
енх Јxcos a+ Е ysina + ft)HyO)f, 0 Ј ну -Ј xsin a+E ycosa -й)нхй)0,
Ј z Јz+Јo
гдей)нх, ft)y,Hz,ЈHx, ,Јну, е нг угловые скорости и ускорения относительно осей эллипсоида инерции нагрузки Хн, YK, Z. Ось 5 ZH совпадает с осью Z. а оси Хн и YH вращаются вместе с нагрузкой и сдвинуты относительно осей X и Y на угол а соответственно. Сигналы угловых скоростей , ыну, ft)Hz. проходя через перемножители 42-46 и 0 масштабные преобразователи 66, 67, 68 с коэффициентами преобразования ( Hz- )Ну), (ну- нх), Онх IHZ) соответственно, поступают на сумматоры 57, 60,58. Здесь нх, ну и - моменты инерции нагрузки по соот- 5 ветствующим осям. На вторые входы сумматоров 57, 60 и 58, через масштабные преобразователи 70, 71 и 69 с коэффициентами IHx, IHZ и ну соответственно, поступают сигналы угловых ускорений &нх, Ј Hz и Ј Ну соответственно. На выходах сумматоров 57, 60 и 58 формируются сигналы, пропорциональные Мнх, MHZ и Мму, которые вычисляются по известным формулам теоретической механики (динамические уравнения Эйлера)
Мнх ГхЈнх + (1нг- ну). Мну 1НУ Јну + (1нх-Л)йЛй)Нх,(2)
МН iH -, Н , /|Н|НЧ,.,М ,Ч
z f z Ј z U у - I x) д & у.
где Мнх, Мну, Мнг - внешние моменты дейст- вующие на двигатель, приведенные к осям
Хн. Ты. ZH.
Сигналы Мнх и поступают на перё- множители 47, 48 и 49. 50 соответственно, 5 на другие входы которых поступают сигналы с синусно-косинусного преобразователя угла. С выходов перемножителей сигналы поступают на входы сумматоров 59 и 61, на выходе которых формируются сигналы в соответствии с системой уравнений
(3)
Mz/8Rc + (Fyfi + M x)/2c(fi + Гц) ,
oil,
;о„
.oil
2 Mz/8Rc - (Fxf,- My )/2c(li + Mi) ;3 Mz/8Rc - (Fyli + Mx)/2c(fi -f- tfri)
MX a - M ysina, My MHxSin a+ MHycosa Mz MHZ ,
где MX, My. Mz - внешние моменты, действующие на двигатель относительно осей X, Y nZ.
С выходов датчиков линейных ускорений 8 и 7 сигналы, пропорциональные а) у и сох, через масштабные преобразователи 72, 74 и 73, 75 с коэффициентами преобразования mfii, mfi и mm rmi соответственно, где m - масса нагрузки, a ft и 0/ расстояния по оси вращения вала от центра масс нагрузки до середины активных зон первого и второго ЭМП соответственно, поступают на вторые входы сумматоров 62, 6 и 63, 65 соответственно. На первые входы сумматоров 62 и 64 поступает сигнал, пропорциональный Мх. а на первые входы сумматоров 63 и 65 поступает сигнал Му. С выходов сумматоров 62, 63, 64, 65 сигналы через масштабные преобразователи 76, 78, 79,80, с коэффициентами преобразования 1 /2c(fi + fti) каждый, где с - коэффициент пропорциональности между током сектора якорной обмотки и электро- магнитной силой, создаваемой этим током, поступают на вторые входы сумматоров всех восьми каналов формирования якорных токов. На первые входы сумматоров всех восьми каналов формирования якор- ных токов поступает сигнал, пропорциональный М с выхода сумматора 60 через масштабный преобразователь 77, с коэффициентом преобразования 1/8Rc, где R - средний радиус воздушного зазора ЭМП. На выходе сумматоров всех восьми каналов формирования якорных токов, формируются оптимальные токи во всех восьми секторах якорных обмоток обоих ЭМП в соответствии с системой уравнений ioli:. Mz/8Rc + (Fylu - Mx)/2ctfi + In), Mz/8Rc - (Fxfn + M y)/2c(fi + bi) Гз Mz/8Rc - (FyJ-n - Mx)/2c(fi + ill) I0|4 Mz/8Rc + (Fxtn + M yj/2c(i + III) l /f
Г 4 M2/8Rc + (Fx - My)/2cfli + In)
где I0|1 I0|4, i 1, . .. Г 4 - якорные токи
соответствующего канала формирования якорных токов в обоих ЭМП.
Усилители мощности 19-22 в первом ЭМП, охваченные глубокой отрицательной обратной связью с помощью датчиков тока 23-26. обеспечивают протекание по обмот- кам якоря первого ЭМП токов i 1, i 2. i з, 14, близких к оптимальным, Идентично работают каналы формирования якорных токов второго ЭМП, которые обеспечивают проте
кание по обмоткам якоря второго ЭМП токов , 1И2,1мз, , близких к оптимаьным.
Токи (4) обеспечивают создание электромагнитных сил и мометов, удовлетворяющих равенствам
MZ® - (F«V+ F%+ pfflatf pO 0lFXJ)Fj)4 rFW -F«rO,()
FYW-i r-FV-FVo, где I - номер соответствующего ЭМП,
MZ - сумма электромагнитных моментов и требуемого момента относительно оси Z для j-ного ЭМП;
FX® , - сумма электромагнитных сил и сил преодоления инерции по осям X и
Y ЭМП;
электромагнитные силы в
пя 1-го Э г%.....
0 5 0 .
0
5
0
соответствующих секторах каждого ЭМП;
М®0 - момент нагрузки j-ro ЭМП;
R - средний радиус воздушного зазора ЭМП;
р(1)х p(i)y силы для преодоления инерции по осям X и Y j-ro ЭМП.
и распределяется поровну между обоими ЭМП
M Z MMz Мг/2
Моменты по осям X и Y вычисляются по результатам измерений датчиками угловых скоростей 9-11, угловых ускорений 12-14 на основе заданных угловой скорости вращения вала а о и углового ускорения вращения
Требуемые силы и моменты, действующие на нагрузку,распределяются между ЭМП в соответствии с системой уравнений
F|X Fx ,
F,yf F yf Fv F - F yli - MX ;
F xfi-P xfii My, Отсюда следует
F r(Fxfi, + My)/(r. + (,,);
F x - (Fxti - My)/(P| + til);
Fy + (Fyfn-Mx)/(b + fii); Flfy (Fyfj + Mx)/(fi + ill).
(6)
(7)
Силы преодоления инерции Fx и Fy вычисляются по результатам измерений датчиками линейных ускорений 7 и 8 в соответствии с равенствами:
Fx mwx ;
Fv mwy .
Момент М является моментом нагрузки и распределяется поровну между обоими ЭМП ,
Mz-M z-Mz/2.
Моменты по осям X и Y вычисляются по результатам измерений датчиками угловых скоростей 9-11, угловых ускорений 12-14 на основе заданных угловой скорости вращения вала (fJcv углового ускорения вращения
вала Б о и угла положения ротора-индуктора а, по формулам (1) - (3).
Равенства (4) получаются в результате решения задачи на условный экстремум с тремя ограничениями типа равенства мето- дом множителей Лагранжа. Требуется найти токи, удовлетворяющие соотношениям
Д1,Й2 + |ҐГ2+ 3 + .
$М2 - $1 + + ®з + 1°И - мЧ/Rc О
yX S4 1 70 0 (8)
vO)FY iu)1 |(3 Fu)y/c о
Здесь первое уравнение соответствует требованию минимума потерь в якорных обмотках, следующие три ограничения типа равенства записаны на основе системы (5).
Функция Лагранжа и условия ее стационарности по токам имеют вид
Т 0,5VH - A«Az -A OW ,
Д(1)3уШру stat ;
dvO)/diO)2 io))1 + AW2 o
dv«VA iW3 A Wi+A№3 0 ))/dl0)4-i4-A0)i-A(j)2 0 откуда получаем:
тх
откуда получаем:
rt.
(Ш АЧ-АЧг 1«з А«,-А% 04 + А ®2
W
Г1 Mz/8Rc + (Fyfu - Mx)/2c(|j +, i° 2 Mz/8Rc - (Fxtti + My)/2c(fi + I0|3 M2/8Rc - ( - MX)/2c(li +
i° .
. , Mz/8Rc + (Fx il+My )/2c(fi -i-by iolf1 Mz/8Rc + (Fyfi + Mx)/2ctf I + til); «° 2 Mz/8Rc - (Fxfi - M y)/2c(f i + t n),
i°n3
10|14.
M2/8Rc - (Fyfi ь M x)/2c(t i + Си); Mz/8Rc + (Fxti - M y)/2c(t i + In).
Решая систему уравнений (9) совместно с системой (8) определяем значения множителей Лагранжа:
A ®i Mz Ш/ 4Rc,
A®2-Ffx/2C/ ЯО))у/2с,
Поставив значения множителей- Лагранжа в уравнения (9), определяем значения оптимальных токов, которые необходимо подать на якорные обмотки для получения требуемого электромагнитного момента и электромагнитных усилий, разгружающих опоры от действия радиальных сил инерции, сил, возникающих из-за того, что центр масс нагрузки не расположен в плоскости, проходящей через середину активных зон ЭМП и от действия радиальных сил, возни- кающих из-за угловых скоростей и ускорений вокруг поперечных осей ЭМП, при минимуме потерь в обмотке якоря:
Применяемые в схеме системы управления МДПТ функциональные блоки проекти
5
10
15
20
25
30
35
40
50
55
руются на интегральных микросхемах, выпускаемых серийно.
Таким образом, благодаря введению в моментный электродвигатель постоянного тока трех датчиков угловых скоростей, трех датчиков угловых ускорений, двух задатчи- ков угловой скорости и углового ускорения и соответствующей системы управления, получен моментный электродвигатель постоянного тока, опоры вращения которого разгружены от радиальных сил, возникающих из-за наличия угловых скоростей и угловых ускорений вокруг поперечных осей двигателя. Предлагаемое изобретение позволяет увеличить ресурс работы моментно- го электродвигателя постоянного тока и повысить плавность хода ротора при сохранении положения оси ротора относительно статора и минимуме потерь, при работе на подвижном основании.
Формула изобретения Моментный электродвигатель постоянного тока с ограниченным углом поворота, содержащий два электромеханических преобразователя, роторы-индукторы которых размещены на одном валу, а якорные обмотки каждого расположены на четырех секторах и соединены с восемью каналами формирования якорных токов, каждый из которых состоит из сумматора, датчика тока и усилителя мощности, выход сумматора соединен с неинвертирующим входом усилителя мощности, а с его инвертирующим входом соединен выход датчика тока, через вход которого к выходу усилителя мощности подключена фаза якорной обмотки, первые неинвертирующие входы сумматоров всех восьми каналов соединены с выходом первого масштабного преобразователя с коэффициентом преобразования 1 /8Rc. где Re средний радиус воздушного зазора электромеханического преобразователя, с - коэффициент, связы бающий ток сектора якорной обмотки с электромагнитной силой этого сектора, вторые неинвертирующие входы сумматоров первых, вторые инвертирующие входы сумматоров третьих каналов формирования якорныхтоков первого и второго электромеханических преобразователей соединены с выходами второго и четвертого масштабных преобразователей соответственно, вторые инвертирующие входы сумматоров вторых, вторые неинвертирующие входы сумматоров четвертых каналов формирования якорных токов первого и второго электромеханических преобразователей соединены с выходами третьего и пятого масштабных преобразователей соответственно, и два датчика линейных ускорений, размещенных на одном
основании со статором так, что ось первого датчика параллельна осям второго и четвертого секторов, а ось второго датчика параллельна осям первого и третьего секторов, о тличающийся тем, что. с целью повышения надежности и плавности хода при сохранении положения оси ротора относительно статора и при минимуме потерь в обмотках путем создания электромагнитных сил , разгружающих опоры от радиальных усилий, в момен тный электродвигатель постоянного тока введены задатчики угловой скорости и углового ускорения вращения роторов электромеханических преобразователей, синусно-косинусный преобразователь угла, механически соединенный с валом роторов, три датчика угловых ускорений и три датчика угловых скоростей по трем взаимно ортогональным осям, семнадцать перемножителей, пятнадцать сумматоров и десять масштабных преобразователей, оси первых и вторых датчиков угловых скоростей и ускорений параллельны осям первого и второго датчиков линейных ускорений соответственно, ось третьих датчиков угловых скоростей и ускорений параллельна оси вала ротора, синусный и косинусный выходы синусно-косинусного преобразователя угла соединены с первыми входами второго, третьего, пятого, восьмого и первого, четвертого, шестого, седьмого перемножителей соответственно, вторые входы перемножителей первого, второго и третьего, четвертого соединены с выходами соответственно первого и второго датчиков угловых скоростей, вторые входы перемножителей третьего, четвертого и пятого, шестого соединены с выходами второго и первого датчикоегугловых ускорений соответственно, выход заДатчика угловой скорости соединен с первыми входами десятого и двенадцатого перемножителей и первого дополнительного сумматора, второй вход которого соединен с выходом третьего датчика угловой скорбсти, выходы задатчика углового ускорения и третьего датчика углового ускорения соединены с перым и вторым входами соответственно шестого дополнительного сумматора, выходы третьего, пятого, четвертого и шестого перемножителей соединены соответстенно с перывми инвертирующими входами второго и четвертого и первыми неинвертирующими входами третьего и пятого дополнительных сумматоров, выходы первого, второго, седьмого и восьмого перемножителей соединены с вторыми неинвертирующими входами второго, третьего, четвертого и пятого дополнительных сумматоров соответственно, выход первого дополнительного сумматора соединены с первыми входами девятого и тринадцатого перемножителей, выход второго дополнительного сумматора соединен с вторыми входами девятого, десятого и с первым входом одиннадцатого перемножителей, выход третьего дополнительного сумматора соединен с вторыми входами
0 одиннадцатого, двенадцатого и тринадцатого перемножителей, выход десятого пере- множителя соединен с третьим неинвертирующим входом пятого дополнительного сумматора, а выход двенадцатого
5 перемножителя соединен с третьим инвертирующим, входом четвертого дополнитель- ного сумматора, выходы девятого, одиннадцатого и тринадцатого перемножителей через дополнительные преобразова0 тели, перывй, в-горой и третий, с коэффициентами преобразования (нг - ну), (ну - нх) и (1ИХ - IHZ) соответственно, где - 1нх, lHy, IHZ - моменты инерции нагрузки относительно главных осей эллипсоида
5 инерции нагрузки Хн, YH, ZH, соединены с первыми входами седьмого, десятого и восьмого дополнительных сумматоров соответственно, вторые входы этих сумматоров через пятый, шестой и четвертый дополни0 тельные масштабные преобразователи с коэффициентами преобразования 1НХ, Г2 И |НУ соответственно соединены с выходами пятого, шестого и четвертого дополнительных сумматоров соответственно, выходы
5 седьмого и восьмого дополнительных сумматоров соединены с вторыми входами четырнадцатого, пятнадцатого ич шестнадцатого, семнадцатого перемножителей соответственно, выходы четырнадца0 того и шестнадцатого перемножителей соединены с первыми неинвертирующими входами девятого и одиннадцатого дополнительных сумматоров, а выходы пятнадцатого и семнадцатого перемножителей
5 соединены с вторым неинвертирующим и вторым инвертирующим входами одиннадцатого и девятого дополнительных сумматоров соответственно, выход девятого сумматора соединен с первым инвертирую0 щим входом двенадцатого и первым неинвертирующим входом четырнадцатого дополнительных сумматоров, а выход одиннадцатого сумматора с первым неинвертирующим входом тринадцатого и первым
5 инвертирующим входом пятнадцатого До- полнительных сумматоров, выход первого датчика линейных ускорений через седьмой и девятый дополнительные масштабные преобразователи с коэффициентами преобразования mfii и mu соответственно, где m масса нагрузки, а и fit - расстояния по оси вращения от центра масс нагрузки до середины активных зон первого и второго электромеханических преобразователей соответственно, соединен с вторыми неинвертирующими входами двенадцатого и четырнадцатого дополнительных сумматоров соответственно, выход второго датчика линейных ускорений через восьмой и десятый дополнительные масштабные преобразователи с коэффициентами преобразования m(ji и mu соответственно соединен с вторы
ми неинвертирующими входами тринадцатого и пятнадцатого дополнительных сумматоров, выходы двенадцатого, тринадцатого, четырнадцатого и пятнадцатого дополнительных сумматоров с вторым, третьим, четвертым и пятым основными масштабными преобразователями соответственно с коэффициентами преобразования 1 /2c(fi + f и) у каждого, выход десятого дополнительного сумматора соединен с перывм основным масштабным преобразователем.


| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный электродвигатель постоянного тока | 1988 |
|
SU1629949A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742949A2 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1624617A1 |
| Моментный вентильный электродвигатель | 1987 |
|
SU1448373A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1985 |
|
SU1283929A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1534662A1 |
| Моментный вентильный электродвигатель | 1986 |
|
SU1363413A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2192705C2 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742950A1 |
Изобретение относится к электротехнике. Цель изобретения - повышение надежности и плавности хода при сохранении положения оси ротора относительно статора и при минимуме потерь в обмотках якоря путем создания электромагнитных сил, разгружающих опоры вращения от радиальных усилий. Моментный электродвигатель постоянного тока с ограниченным углом поворота содержит два электромеханических преобразователя, роторы-индукторы которых размещены на одном валу, якорные обмотки каждого преобразователя расположены на четырех секторах и соединены с восемью каналами формирования якорных токов, каждый из которых состоит из сумматоров, датчиков типа, усилителей мощности и масштабных преобразователей. С валом двигателя соединен синусно-косинусный преобразователь угла. Три датчика угловых ускорений, три датчика угловых скоростей установлены по трем взаимно ортогональным осям. Введением кроме того дополнительных перемножителей, сумматоров и масштабных преобразователей удается сформировать сигналы в обмотках якорей, позволяющие скомпенсировать радиальные силы, действующие на опоры. 2 ил.
Mi
Vet
У
Wa 2« ofe
Фаг. d
1
| Моментный электродвигатель постоянного тока | 1988 |
|
SU1561161A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ ремонта обмоток электрических машин | 1988 |
|
SU1629946A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
