Изобретение относится к авиаприборостроению, в частности к приборам, определяющим положение объекта относительно встречного потока воздуха.
Известна схема построения преобразователя аэродинамических углов, содержащая обтекаемое тело с приемниками давления, пневмоэлектрический преобразователь, пневмопереключатель, моделирующий входной сигнал пневмоэлектрического преобразователя, например в виде электропневмоклапана, опорный генератор, фазочувствительную электронную схему выделения сигнала основной частоты и следящий привод для ориентации приемников в симметричном положении относительно направления набегающего потока. Однако указанный преобразователь имеет низкую точность, обусловленную погрешностями схемы выделения сигнала основной частоты.
Цель изобретения - повышение точности ориентирования приемников давления относительно направления набегающего потока. Это достигается тем, что в преобразователь дополнительно введен коммутатор фазы, включенный между опорным генератором и обмоткой возбуждения следящего привода.
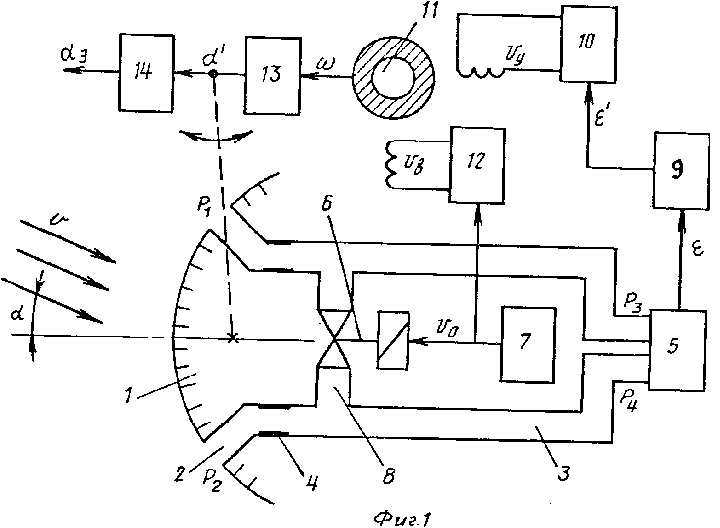
На фиг. 1 показана схема предлагаемого преобразователя; на фиг. 2 - временные диаграммы, поясняющие его работу.
Преобразователь аэродинамических углов содержит обтекаемое тело 1, на поверхности которого расположены приемники давления 2 для забора давлений Р1 и Р2, характеризующих измеряемый аэродинамический угол α . Приемники давления 2 соединены каналами 3, в которых установлены дроссели 4, с входом пневмоэлектрического преобразователя 5. Пневмопереключатель, моделирующий входной сигнал пневмоэлектрического преобразователя 5, выполнен в виде электропневмоклапана 6, подсоединенного к опорному генератору 7, и установлен в канале 8, соединяющем приемники давления 2 между собой.
Выход пневмоэлектрического преобразователя 5 связан со следящим приводом, включающим модулятор 9, усилитель 10 и двигатель 11. Обмотка возбуждения последнего соединена с шиной питания через коммутатор фазы 12, управляемый от опорного генератора 7. Выходной вал двигателя 11 через редуктор 13 кинематически связан с блоком приемников давления и выходным устройством 14, сигнал α э которого пропорционален измеряемому аэродинамическому углу α .
Преобразователь работает следующим образом.
При симметричном расположении приемников давления 2 относительно направления скорости набегающего потока забираемые давления Р1 и Р2 и давления Р3 и Р4 на входе пневмоэлектрического преобразователя 5 соответственно равны между собой. Периодическое открытие и закрытие канала 8 при работе пневмопереключателя не приводит к изменению давлений Р3 и Р4. Выходной сигнал в виде переменной составляющей основной частоты равен нулю и блок с приемниками давления остается неподвижным.
Приращение аэродинамического угла приводит к нарушению равенства давлений Р1 и Р2, а при перекрытом канале 8 также и давлений Р3 и Р4. При открытии канала 8 за счет перетока по нему воздуха давления Р3 и Р4 выравниваются. В процессе работы пневмопереключателя, управляемого сигналом опорного генератора давления, на входе пневмоэлектрического преобразователя 5, а следовательно, на его выходе (сигнал ε ) имеется составляющая основной частоты (см. фиг. 2), уровень которой определяет величину приращения аэродинамического угла, а фаза (относительно сигнала Uо) - его знак.
В следящем приводе сигнал моделируется, усиливается и в виде модулированного сигнала с несущей частотой, соответствующей частоте питания сети, поступает на управляющие обмотки исполнительного двигателя. Последний через редуктор 13 устанавливает блок с приемником давления в положение устойчивого равновесия, при котором давления Р1 и Р2, Р3 и Р4 соответственно равны между собой. Суммарный угол поворота блок с приемниками от некоторого начального положения является мерой измеряемого угла, фиксируется выходным устройством 14 и в виде сигнала α э подается на указатель или другие системы.
Так как выходной сигнал εl модулятора 9 (см. фиг. 2) через каждые полпериода работы пневмопереключателя изменяет на 180о фазу, то для того, чтобы выходной вал двигателя 11 при отработке сигнала не изменял периодически направление вращения, при помощи коммутатора фазы 12 обеспечивается периодическое изменение на 180о фазы напряжения Ub, подаваемого на его обмотку возбуждения. Управление работой коммутатора фазы осуществляется от опорного генератора 7.
Таким образом, в измерительной цепи предлагаемого устройства отсутствует фазочувствительная электронная схема выделения сигнала основной частоты (фазочувствительный дискриминатор) и, следовательно, отсутствуют вносимые погрешности, что приводит к повышению точности преобразователя. (56) Авторское свидетельство СССР N 490339, кл. G 01 B 5/24, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК АЭРОДИНАМИЧЕСКИХ УГЛОВ | 1978 |
|
SU702795A1 |
| ПРЕОБРАЗОВАТЕЛЬ АЭРОДИНАМИЧЕСКИХ УГЛОВ | 1974 |
|
SU490339A1 |
| ДАТЧИК АЭРОДИНАМИЧЕСКИХ УГЛОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1973 |
|
SU466786A1 |
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВОЗДУШНОГО ПОТОКА | 2009 |
|
RU2426133C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2016 |
|
RU2651315C1 |

ПРЕОБРАЗОВАТЕЛЬ АЭРОДИНАМИЧЕСКИХ УГЛОВ, содержащий обтекаемое тело с приемником давления, пневмоэлектрический преобразователь, электропневматический переключатель, опорный генератор и следящий привод с обмоткой возбуждения, отличающийся тем, что, с целью повышения точности преобразования, в него дополнительно введен коммутатор фазы, включенный между опорным генератором и обмоткой возбуждения следящего привода.
