Изобретение относится к области авиационного приборостроения, в частности к устройствам бортового радиоэлектронного оборудования, и может быть использовано для определения параметров окружающей среды (скорости и направления ветра, температуры, атмосферного давления и т.п.).
Известны устройства для определения скорости и направления воздушного потока, реализующие аэродинамические (Патент РФ №2251128, G01W 1/02, опубл. 27.04.2005) и термоанемометрические (Патент РФ №2276775, G01F 1/692, опубл. 20.05.2006) способы. Недостатком таких устройств является невозможность их применения на воздушных судах в связи с низкой механической надежностью, малым сроком службы, большими массогабаритными характеристиками.
Эти недостатки устранены в системах, реализующих способ измерения скорости воздушного потока, основанный на преобразовании кинетической энергии набегающего воздушного потока в потенциальную энергию заторможенного воздуха. Примером такой системы является система, описанная в патенте РФ 2307358, G01P 5/16, опубл. 27.09.2007 и принятая в качестве прототипа предлагаемого технического решения. Она служит для выработки информации о высотно-скоростных параметрах вертолета. Данная система содержит проточный многоканальный аэрометрический приемник, полости дросселированного статического давления и трубки полного давления которого подключены ко входам n дифференциальных пневмоэлектрических преобразователей, где n=2, 3…, электроизмерительные схемы которых через последовательно соединенные мультиплексор и аналого-цифровой преобразователь подключены к микропроцессору, выход которого является выходом системы по высотно-скоростным параметрам полета вертолета.
Недостатком данного технического решения является то обстоятельство, что система обладает низкой чувствительностью к малым скоростям воздушного потока (менее 20 м/с), что отрицательно сказывается на безопасности эксплуатации вертолетов, а также не сигнализирует о достижении определяемыми параметрами критических значений. К тому же данная система не подразумевает определение температуры окружающего воздуха.
Технический результат предложенного решения состоит в повышении безопасности эксплуатации вертолетов за счет возможности определения и отображения малых скоростей воздушного потока, воздействующего на летательный аппарат, а также в возможности предупреждения экипажа о критических значениях определяемых параметров и повышении надежности работы системы.
Указанный технический результат достигается тем, что система определения параметров воздушного потока содержит последовательно соединенные многоканальный приемник воздушных сигналов, выполненный в виде тела вращения, включающий блок определения параметров воздушного потока, содержащий трубки полного давления, соединенные с пневмоэлектрическими преобразователями, и два экранирующих диска, в которых выполнены полости местного статического давления, содержащие отверстия приема местного статического давления и расположенные по окружности дисков, и блок определения атмосферных параметров, включающий пневмоэлектрический преобразователь статического давления, электроизмерительные схемы, аналого-цифровой преобразователь, вычислительное устройство. Причем система содержит включенный между аналого-цифровым преобразователем и вычислительным устройством микроконтроллер, а вычислительное устройство включает последовательно соединенные вычислители с подключенными к, по меньшей мере, двум из них постоянными запоминающими устройствами, анализатор, формирователь команд, преобразователь интерфейсов, а также указанный многоканальный приемник воздушных сигналов, содержащий дополнительный блок определения параметров воздушного потока, включающий датчики первичной информации, подключенные к измерительным трубопроводам с установленными в них сужающими устройствами, расположенным радиально в плоскости, перпендикулярной оси вращения многоканального приемника воздушных сигналов, а блок определения атмосферных параметров выполнен в виде камеры с воздухопроницаемыми стенками, внутри которой установлен датчик температуры. Причем в качестве пневмоэлектрических преобразователей использованы дифференциальные датчики давления, причем их входы низкого давления соединены с общим выходом каждой пары отверстий приема местного статического давления обоих экранирующих дисков. Причем блоки определения параметров воздушного потока расположены под углом друг к другу в плоскости, ортогональной оси вращения многоканального приемника воздушных сигналов. Причем вычислительное устройство содержит блок управления сигнализацией. Причем вычислительное устройство содержит блок контроля отказов. Причем между преобразователем интерфейсов и формирователем команд выполнен двунаправленный канал обмена данными. Причем вычислительное устройство содержит модуль ввода летных ограничений, соединенный с формирователем команд.
Заявленная система представлена на чертежах:
Фиг.1 - Структурная схема системы определения параметров воздушного потока;
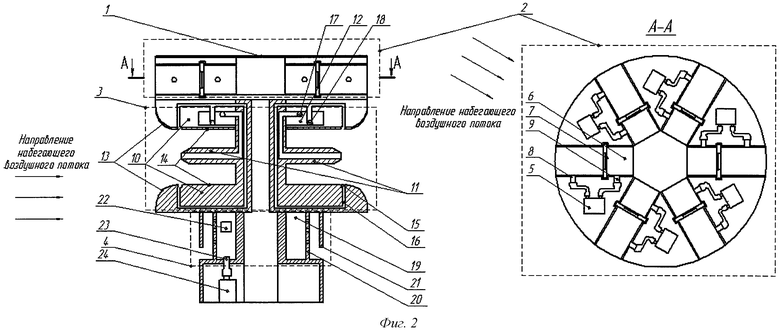
Фиг.2 - Многоканальный приемник воздушных сигналов.
Система определения параметров воздушного потока (Фиг.1) содержит многоканальный приемник 1 воздушных сигналов (МПВС), представляющий собой тело вращения (Фиг.2) и содержащий блок 2 определения скорости и направления воздушного потока методом дросселирования, блок 3 определения скорости и направления воздушного потока методом торможения, расположенные друг относительно друга на 30 градусов, и блок 4 определения атмосферных параметров.
Блок 2 содержит датчики 5 первичной информации и измерительные трубопроводы 6 с установленными в них сужающими устройствами 7, оси которых расположены радиально в одной плоскости, ортогональной оси МПВС. В качестве датчиков 5 первичной информации использованы дифференциальные датчики давления, а в качестве сужающих устройств 7 - диафрагмы. Трубопроводы 6 имеют выходные штуцеры 8 высокого давления и штуцеры 9 низкого давления, расположенные перед диафрагмой 7 и позади нее относительно входа трубопроводов 6 соответственно. К выходным штуцерам 8 и 9 измерительных трубопроводов 6 подключены датчики 5. Входы высокого давления датчиков 5 соединены со штуцерами 8 высокого давления трубопроводов 6, а входы низкого давления датчиков 5 - со штуцерами 9 низкого давления трубопроводов 6.
Блок 3 включает два экранирующих диска 10, трубки 11 приема полного давления (в предлагаемом решении использовано 6 трубок) и пневмоэлектрические преобразователи 12 местного статического и полного давлений, в качестве которых в предложенном решении использованы дифференциальные датчики давления. Внутренние поверхности экранирующих дисков 10 образованы сопряжением поверхностей 13, близких к поверхностям Вентури, и плоскостей 14, ортогональных оси МПВС. В местах сопряжения плоскостей 14 и поверхностей 13 в каждом из экранирующих дисков 10 выполнены полости 15 местного статического давления, содержащие отверстия 16 приема местного статического давления, расположенные по окружности дисков 10. В данном техническом решении использовано по 6 отверстий на каждом из дисков. Каждая пара отверстий 16 верхнего и нижнего дисков 10 имеет общий выходной штуцер местного статического давления (не показан). Трубки 11 приема полного давления, оси которых ортогональны оси МПВС, расположены в междисковом пространстве одной плоскости с соответствующими отверстиями 16. Выходы трубок 11 соединены со входами 17 высокого давления соответствующих датчиков 12, входы 18 низкого давления которых соединены с общими выходными штуцерами местного статического давления.
Блок 4 выполнен в виде цилиндрической камеры 19 статического давления, содержащей перфорированную перегородку 20, стенка 21 которой выполнена с зазором и которая предназначена для экранирования внутреннего объема камеры 19 от действия набегающего воздушного потока. Внутри камеры 19 установлен датчик 22 температуры наружного воздуха. На дне камеры имеется штуцер 23, соединенный со входным штуцером пневмоэлектрического преобразователя 24 статического давления.
Также система содержит электроизмерительные схемы 25, аналого-цифровой преобразователь 26 (АЦП), микроконтроллер 27 и вычислительное устройство. Между АЦП 26 и микроконтроллером 27 организован двунаправленный канал обмена данными.
Вычислительное устройство содержит блок 28 контроля отказов, первый вычислитель 29, к которому подключено первое постоянное запоминающее устройство 30 (ПЗУ), второй вычислитель 31, к которому подключено второе ПЗУ 32, третий вычислитель 33, анализатор 34, блок 35 управления сигнализацией, формирователь 36 команд, модуль 37 ввода летных ограничений, третье ПЗУ 38 и преобразователь 39 интерфейсов.
Работа устройства осуществляется следующим образом. Многоканальный приемник 1 воздушных сигналов (фиг.2) устанавливается на фюзеляже вертолета. При обдувании приемника воздушным потоком происходит взаимодействие поверхностей 13 и плоскостей 14 с этим потоком. Это приводит к формированию поля давлений вокруг приемника 1. Газодинамические параметры этого поля воспринимаются трубками 11 и отверстиями 16. Давления Рп от входных отверстий каждой из трубок 11 подаются к штуцерам 17. Давления Рм.ст отверстий 16 подаются к штуцерам 18. В соответствии с поступившими давлениями Рп и Рм.ст пневмоэлектрические преобразователи 12 вырабатывают сигналы по напряжению Vт.
Одновременно происходит взаимодействие между набегающим воздушным потоком и измерительными трубопроводами 6 за счет деформации потока, обусловленной наличием диафрагм 7. Это приводит к изменению распределения местного статического давления по длине измерительных трубопроводов 6. Параметры этого поля давлений воспринимаются штуцерами 8 и 9. Давления Рс и Рд от штуцеров 8 и 9 подаются соответственно на входы высокого давления и входы низкого давления датчиков 5. В соответствии с поступившими давлениями Рс и Рд датчики 5 вырабатывают сигналы по напряжению Vд.
Также происходит взаимодействие между набегающим воздушным потоком и камерой 19. Воздушный поток, проникая в камеру 19 через зазор, затормаживается в пространстве между стенкой 21 камеры 19 и перегородкой 20, в результате чего пневмоэлектрический преобразователь 24 статического давления и датчик 22 температуры воспринимают соответственно атмосферное давление и температуру наружного воздуха. В соответствии с поступившим давлением Рст пневмоэлектрический преобразователь 24 вырабатывает сигнал по напряжению Vст. Датчик 22 температуры вырабатывает сигнал по току Iт.
Сигналы Vт (6 сигналов), Vд (6 сигналов), Vст, Iт передаются на электроизмерительные схемы 25, где происходит подавление неполезных шумовых составляющих и нормирование уровня выходных сигналов всех пневмоэлектрических преобразователей и датчиков. С выхода электроизмерительных схем 25 данные поступают на вход АЦП 26, работающего под управлением микроконтроллера 27. Микроконтроллер 27 выдает тактирующий сигнал, управляет переключением каналов АЦП 26, принимает от него данные, анализирует их на наличие признаков отказа датчиков 5 и 22, преобразователей 12 и 24 и формирует пакеты данных для отправки на вход первого вычислителя 29 и на вход блока 28 контроля отказов.
По разработанному алгоритму работы системы в соответствии с передаточными функциями датчиков 5 и 22 и пневмоэлектрических преобразователей 12, 24, электроизмерительных схем 25 и АЦП 26, информация о которых хранится в первом ПЗУ 30, производится конвертирование цифровых показаний в значения физических величин.
Приведем пример алгоритма работы системы. Для этого введем следующие обозначения: Р1…Р6 - сигналы канала определения скорости методом торможения, P7…P12 - сигналы канала определения скорости методом дросселирования, Рст - сигнал атмосферного давления, Тнв - сигнал температуры наружного воздуха. Значения физических величин передаются для последующей обработки на вход второго вычислителя 31.
Обработка поступивших данных начинается с определения максимального из сигналов P1…P6. Номер трубки с максимальным уровнем сигнала определяет первое приближение углового положения вектора скорости воздушного потока δ0. Вторым этапом обработки массива сигналов является определение знака отклонения углового положения вектора скорости потока от направления трубки с максимальным сигналом. Для этого производится сравнение по величине информативных сигналов соседних с трубкой максимального сигнала приемника 1 и в зависимости от этого определяется знак приращения углового положения k×Δδ. Результаты определения знака отклонения Δδ приведены в таблице 1.
Уточнение величины приращения Δδ производится, исходя из решения уравнения вида
 ,
,
где fmax±1(δ0+k×Δδ) и fmax(δ0+k×Δδ) - угловые характеристики трубок 11 полного давления приемника 1 воздушных сигналов в диапазоне углов 0…360°, записанные во втором ПЗУ 32. Тогда угол направления скорости воздушного потока, определенный по каналу торможения, составит δT=δ0+k×Δδ.
Восстановление истинной величины сигнала, соответствующего динамическому напору, действующему под углом δТ к трубке 11, производится в соответствии с выражением

Величина скорости воздушного потока по каналу торможения определяется в соответствии с выражением
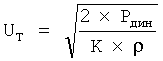 ,
,
где K - коэффициент восстановления давления трубки 11, ρ - плотность воздуха.
Алгоритм определения направления воздушного потока методом дросселирования δД аналогичен алгоритму определения направления воздушного потока методом торможения.
Обозначим ΔРmах и ΔРmах±1 соответственно максимальный и второй по величине сигналы из массива Р7…Р12. Для сигналов ΔРmах и ΔPmax±1 рассчитываются вспомогательные переменные U1 и U2:
 ,
,
 ,
,
где с - коэффициент истечения диафрагмы, ε - коэффициент расширения диафрагмы, β -относительный диаметр диафрагмы.
Величина скорости воздушного потока по каналу дросселирования определяется в соответствии с выражением
 .
.
Далее значения скорости и направления воздушного потока, полученные методами дросселирования и торможения, передаются для обработки на входы третьего вычислителя 33. Значения температуры наружного воздуха и атмосферного давления передаются на вход формирователя 36 команд. Третий вычислитель 33 выполняет обработку данных по известному алгоритму фильтра Калмана. В результате реализации известного алгоритма комплексной обработки данных на выходе третьего вычислителя 33 имеем значения скорости воздушного потока U и направления воздушного потока δ. Эти значения с выхода третьего вычислителя 33 поступают на вход анализатора 34. В нем происходит разложение вектора скорости воздушного потока на ортогональные составляющие и сравнение их с заранее записанными в третьем ПЗУ 33 летными ограничениями. Полученные составляющие, а также величина скорости и направление воздушного потока передаются на вход формирователя 36 команд. Анализатор 34 сравнивает полученные данные с данными, хранящимися в третьем ПЗУ 38, после чего выдает соответствующие команды на вход блока 35 управления сигнализацией и на вход формирователя 36 команд. Блок 35 управления сигнализацией, получая сигналы от блока 28 контроля отказов и анализатора 34, формирует соответствующие команды для передачи на вход формирователя 36 команд. Этот блок на основе полученных значений скорости и направления воздушного потока, температуры наружного воздуха, атмосферного давления, рассчитанных величин ортогональных составляющих скорости воздушного потока, а также команд от блока 35 управления сигнализацией формирует пакет данных для передачи бортовым системам через преобразователь 39 интерфейсов.
Дополнительной функцией формирователя 36 команд является обмен данными между бортовыми системами и системой определения параметров воздушного потока с целью обеспечения возможности ввода данных в третье ПЗУ 38 через модуль 37 ввода летных ограничений.
Определяемые параметры воздушного потока выводятся на устройство отображения информации, например на дисплей (не показан). В случае если определяемые параметры превышают критические значения, записанные в третьем ПЗУ 38, система вырабатывает визуальные и акустические сигналы.
Таким образом, предложенная система определяет и отображает параметры воздушного потока, а также вырабатывает сигналы в случае достижения контролируемыми параметрами критических значений при малых значениях скорости воздушного потока, что повышает безопасность эксплуатации вертолетов. Кроме того, благодаря наличию модуля ввода летных ограничений и двунаправленного канала обмена данными между блоком преобразователя интерфейсов и блоком формирователя команд, предложенная система позволяет программировать систему, задавая летные ограничения для различных условий эксплуатации и различных типов воздушных судов.
За счет использования двух различных по физической природе методов определения скорости и направления воздушного потока повышается точность и надежность работы системы.
Экспериментальные данные испытаний приемника 1 воздушных сигналов показали, что максимальная точность определения скорости воздушного потока методом торможения достигается, когда воздушный поток направлен соосно с одной из трубок приема полного давления, а максимальная точность определения направления воздушного потока достигается, когда воздушный поток направлен по биссектрисе угла, образованного двумя соседними трубками полного давления. Таким образом, предложенное взаимное расположение блока 2 и блока 3 приводит к повышению точности определения скорости и направления воздушного потока.
Благодаря использованию дифференциальных датчиков давления удалось снизить погрешность определения скорости и направления воздушного потока.
Предложенная система помимо использования на вертолетах может быть применена на любых подвижных объектах (как на воздушных судах, так и на водном и наземном транспорте), а также в метеорологии и в навигации в целом.
На основании вышеизложенного можно сделать вывод о том, что предложенное техническое решение соответствует критериям патентоспособности изобретения: новизна, изобретательский уровень и промышленная применимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2005 |
|
RU2307358C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2730814C2 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2016 |
|
RU2651315C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307357C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2011 |
|
RU2518871C2 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
| БОРТОВАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА | 2010 |
|
RU2439584C1 |
Изобретение относится к области авиационного приборостроения, в частности к устройствам бортового радиоэлектронного оборудования, и может быть использовано для определения параметров окружающей среды (скорости и направления ветра, температуры, атмосферного давления и т.п.) до запуска силовой установки вертолета и раскрутки трансмиссии. Система определения параметров воздушного потока содержит последовательно соединенные многоканальный приемник воздушных сигналов, выполненный в виде тела вращения, включающий блок определения параметров воздушного потока, два экранирующих диска, блок определения атмосферных параметров. В экранирующих дисках выполнены полости местного статического давления, содержащие отверстия приема местного статического давления и расположенные по окружности дисков. Блок определения атмосферных параметров включает пневмоэлектрический преобразователь статического давления, электроизмерительные схемы, аналого-цифровой преобразователь и вычислительное устройство. Многоканальный приемник воздушных сигналов содержит дополнительный блок определения параметров воздушного потока, который включает датчики первичной информации. Блок определения атмосферных параметров выполнен в виде камеры с воздухопроницаемыми стенками, внутри которой установлен датчик температуры. Технический результат - повышение безопасности эксплуатации вертолетов и надежности работы системы. 6 з.п. ф-лы, 2 ил., 1 табл.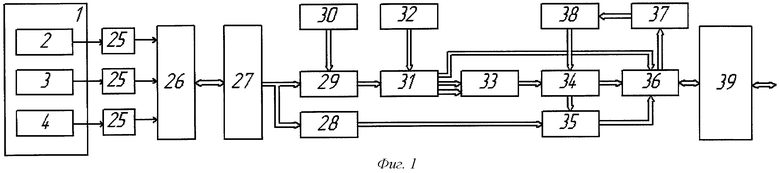
1. Система определения параметров воздушного потока, содержащая последовательно соединенные многоканальный приемник воздушных сигналов, выполненный в виде тела вращения, включающий блок определения параметров воздушного потока, содержащий трубки полного давления, соединенные с пневмоэлектрическими преобразователями, и два экранирующих диска, в которых выполнены полости местного статического давления, содержащие отверстия приема местного статического давления и расположенные по окружности дисков, и блок определения атмосферных параметров, включающий пневмоэлектрический преобразователь статического давления, электроизмерительные схемы, аналого-цифровой преобразователь, вычислительное устройство, отличающаяся тем, что система содержит включенный между аналого-цифровым преобразователем и вычислительным устройством микроконтроллер, а вычислительное устройство включает последовательно соединенные вычислители с подключенными к, по меньшей мере, двум из них постоянными запоминающими устройствами, анализатор, формирователь команд, преобразователь интерфейсов, а также указанный многоканальный приемник воздушных сигналов, содержащий дополнительный блок определения параметров воздушного потока, включающий датчики первичной информации, подключенный к измерительным трубопроводам с установленными в них сужающими устройствами, расположенными радиально в плоскости, перпендикулярной оси вращения многоканального приемника воздушных сигналов, а блок определения атмосферных параметров выполнен в виде камеры с воздухопроницаемыми стенками, внутри которой установлен датчик температуры.
2. Система определения параметров воздушного потока по п.1, отличающаяся тем, что в качестве пневмоэлектрических преобразователей использованы дифференциальные датчики давления, причем их входы низкого давления соединены с общим выходом каждой пары отверстий приема местного статического давления обоих экранирующих дисков.
3. Система определения параметров воздушного потока по п.2, отличающаяся тем, что блоки определения параметров воздушного потока расположены под углом друг к другу в плоскости, ортогональной оси вращения многоканального приемника воздушных сигналов.
4. Система определения параметров воздушного потока по п.3, отличающаяся тем, что вычислительное устройство содержит блок управления сигнализацией.
5. Система определения параметров воздушного потока по п.4, отличающаяся тем, что вычислительное устройство содержит блок контроля отказов.
6. Система определения параметров воздушного потока по п.5, отличающаяся тем, что между преобразователем интерфейсов и формирователем команд выполнен двунаправленный канал обмена данными.
7. Система определения параметров воздушного потока по п.6, отличающаяся тем, что вычислительное устройство содержит модуль ввода летных ограничений, соединенный с формирователем команд.
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2005 |
|
RU2307358C1 |
| Клещевидный висячий замок | 1934 |
|
SU41875A1 |
| МНОГОКАНАЛЬНЫЙ АЭРОМЕТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1993 |
|
RU2042137C1 |
| МНОГОКАНАЛЬНЫЙ АЭРОМЕТРИЧЕСКИЙ ЗОНД | 1993 |
|
RU2037157C1 |
| US 6419186 B1, 16.07.2002. | |||

