(54) iPEXKOMnOHEHTHblE 1 ЛАТФОРЛ Ь:Н1- ЫЕ ВЕСЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕСЫ ДЛЯ ВЗВЕШИВАНИЯ БОЛЬШЕГРУЗНЫХ ОБЪЕКТОВ | 1973 |
|
SU394671A1 |
| ВЕСЫ ДЛЯ ВЗВЕШИВАНИЯ АВТОМОБИЛЕЙ | 2005 |
|
RU2335742C2 |
| Весовое устройство с зафиксированной грузоприемной платформой | 2023 |
|
RU2815856C1 |
| Весы для взвешивания большегрузных объектов | 1991 |
|
SU1774189A1 |
| СТАНОК ДЛЯ НАТЯЖЕНИЯ СТРУН ТЕННИСНЫХ РАКЕТОК | 2006 |
|
RU2314851C1 |
| ПЛАТФОРМЕННЫЕ ВЕСЫ | 1971 |
|
SU435460A1 |
| ВЕСЫ | 1994 |
|
RU2085869C1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ | 1996 |
|
RU2108551C1 |
| ЭЛЕКТРОННЫЕ ТЕНЗОВЕСЫ | 1993 |
|
RU2044283C1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯДВИЖУЩИХСЯ В СОСТАВЕ ПОЕЗДА ОБЪЕКТОВ,НАПРИМЕР ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 1971 |
|
SU432347A1 |
1
й.зобретекие относится к 3Jiei;TpOA:eXi; bi ческой весоизмерительной техкике м может быть ислользог а;;.о в платформенных весах при изучении вопроса о взаимодействии грузоприьмного устройства с транспортным сред-, ством, движущимся по Beca:v в проиессе его взвешизания.
Известны по основному авт. св. №432347 весы для взвешивания движущихся в составе поезда объектов, например железнодорож- IQ иых вагонов. Эти весы содержат платформу опирающуюся на фундамент через сютоизмерительные датчики, датчики для определения положения объекта на платформе, аналого-цифрс1вой преобразователь, вычислительные и реги- «5 стрируюшие блоки и отличаются тем,чтосце лью повышения точности, снабжены датчиками определения положения осей автосцепок объектов, находящихся на платформе, ус:, чновленными у платформы на уровне головок автос- 20 цепок объектов, и датчиком измерения продольных горизонтальных усилий, действующих на платформу при прохождении по ней объекта, установленным в продольной горизонтальной тяге, связанной ишрнпрно с платформой ифун- 25
весы псззоляют определять не тонъко вертикальные а;.1грузки от колес ка РОЛЬсы. i:o м ro3ii3ouTi.:;L)i;-iM(: и одолькь;. с);.. действуюа;ие параллельно oci; пугп.
Однако iiaBecTi-bit: ;:,et:M je и: -;э:от уст|.ой ства для измерения горнзопта,г1ьных. поперечных сил, перпендикулярных к осп пути, возникающих, в частности, прн набегании гребня колеса на боковую рабочую грань головкп рельса.
Предложенные весы.,с целью обеспечения проведения экспериментальных исследоватгпй, снабжены динамометрическим устройством для измерения поперечных 1оризоитальных сял, выполненным в гзиде датчиков растяжения, закрепленных в предварительно напряженном состоянии на фундаментной плите и установленных па продолжении внешнего конца натяжной струны.
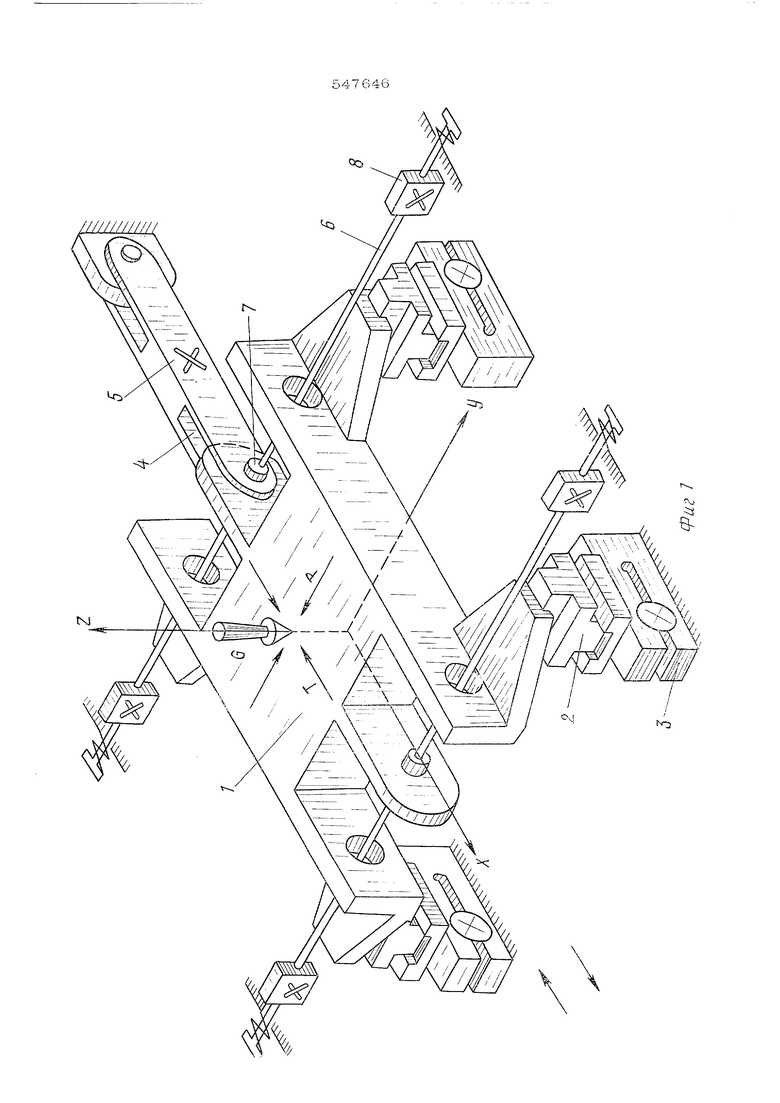
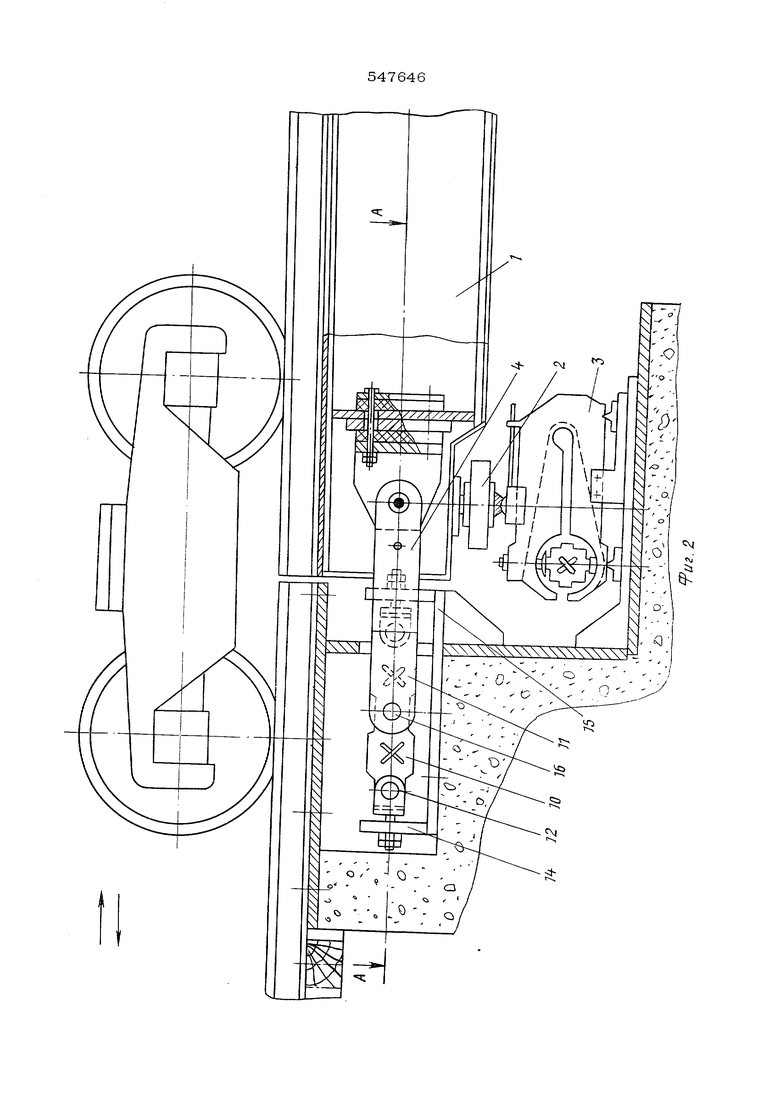
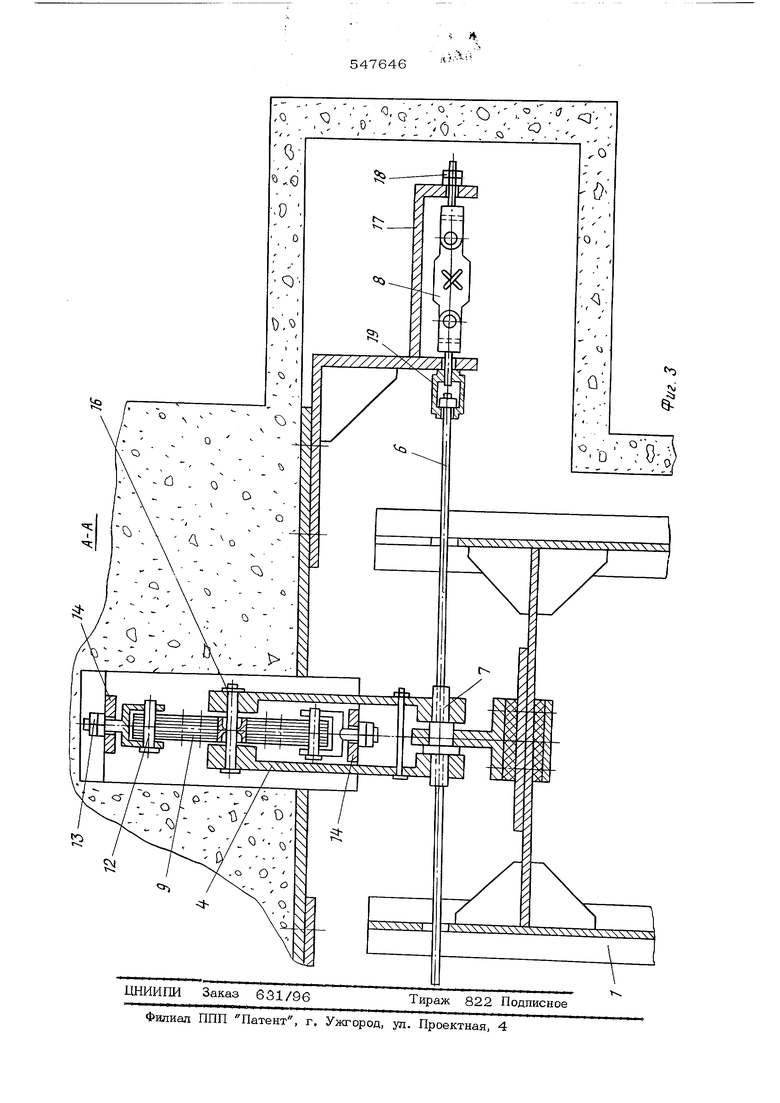
На фиг. 1 изображена принципиальная схема трехкомпоноктчь;х платформенных весов; на фиг, 2 и 3 представлен один из вариантов выполнения склонзмерительных датчиков весов, измеряюащх вертикачькые, продольные и поперечные состаьгшющне полной силы взаимодействия объекта с платформой. Трехко:мт ок8нтп:ые платформенные весы (фиг, 1) состоят КЗ весовой платформы 1, которая опирается по углам через с;-шопередающяе опоры 2 па весовые датчики 3, жест ко закреппонкь-е ка фундаменте к предназначенные для измерения вертикальной составляющей G скль взаимодействия движугиегося объека-а с ипатформой, действующей вдоль оси Z . Устройство продольной стабилизации содер жит одну жесткую тягу 4, расположенную горизонтально и соосно с продольной осью плат формы и шарнирно связанную одним концом с фундаментом, а другим концом- с кронип-ейном ве- Тяга 4 снабжена силоизмерительным дат НИКОМ 5 для измерения продольной состааляюшей Т полной силь: взаимодействия объекта с няатфоо ой, направленной вдоль горизонтал ной оси л . параллельной оси магйстральзног пути. Горизонтальная тяга 4, нередаюгцая продольиьш усилий через силоизмерительный датчик о от платформы на фу 1дамент, оарнирно связана внелн им концом со средней частью MaiTiHTOvrpовода. Устройство аонеречной стабилизации платфор ;ы имеет две натяжные струны. 6, уста- новлеинь;е но од:ой на противоположных коН цах ПJii тфopмы. Каждая струна упрут-о растинута в поперечном горизонтальном направ. ленни мелсду кронштейнами фундамента и сво ей серединой iiiiipHUpHo связана с концевым кронштейном iiaar;popML.i, расположенным вдол ее продольной осп, В качестве шарниров нр лМенена вра. най кянематьческа 1 i;:ipa. Оси вращения шарниров расположены под прямым углом к продольной оси нлатфорьчы. При этом шарннр 7 является общим для устройств продольной и поперечной стабилизации и размещен на продольной осн платформы. Струны 6 снабжены силоизмерительнь:м1-1 датчиками 8, предназначенными для измерения попеоечной состав,ляющей Р силы взаимодействия объекта с платформой, действующей 5о вдоль горизонтальной ОСЕ Y , перпендикулярной к оси пути. Силоизмерительный датчик 5 для определения величиЕ1ы и направления продельной силы Т содержит магнктопровод 9, работаю- 55 щкй на растяжение, с двумя магнитоупругими измерительными ячейками 10 и 11 (фиг. 2 и З). Устранение влияния начальной нелкнейной части выходных характеристик на точность кзмерения и создание условий для применения дифференциальной схемы включения сигнальных обмоток достигается предварительным упругим натяжением магнитопровода, который для этой цели с помощью концевых шарниров 12 и гаек 13 растянут вдоль продольной оси весов мелсду плечами 14 ynpjToro элемента 15, жестко закрепленного на фундаменте. Шарнир 16, связывающий тягу с магНЕГгонр оводом, располагается между измерительными ячейками. При раздельных каналах связи измерителвных ячеек с регистрирующим прнбором ячейка 10 служит для регистрации продольных усилий, растягивающих гризонтальную тягу 4, а ячейка 11 - усилий, сжимающих тягу. Предварительное натяжение магнитопровода создается с помощью упругого элемента 17. жестко закрепленного на кронщтейне фундамента, гаек 18 и резьбовой муфты 19. К муфте датчика присоединяется конец натяжной струны, при этом обеспеч вается возможность допалнительного растяжения магнитопровода с выдачей соответствующего сигнала в случае пояшхения динамических нагрузок, растягивающих CTpjaiy. Изменение знака динамических на.грузок (сжатие) сопровождается свободным нроскальзыванием струны в муфте без передачи нагрузки на датчик. При ншруженин весов продольные горизонтальные салы взаимодействия весовой :шатфорг. с дан ку1дкмся объектом, например локомотивом, передаются от платформы на фундамент через горизонтальную тягу 4 и еилокзмерктельный датчик 5. Участки маг- нитопровода 9 с измерительньнми ячейками 10 и 11 испытывают дополнительную деформацию различных знаков, благодаря чему на выходе ди Ьференциальной схемы появляется электрический сигнал, величина напряжения которого пропорцнональна действующему значению продольной силы т , а полярность напряжения свидетельствует о направлении силы. Например, при растяжении тяги 4 силой 4т участок магнитопровода с ячейкой 10 дополнительно уд н няется и на выходе появляется сигнал напряжением {10Ь+ 2b ). Одновременно с этим участок маглитопровода с ячейкой 11 частично сжимается, вследствие чего на выходе этой ячейки образуется сигнал напряженкя (lOb-2В). Суммарный сигнал после выпрямления равен (10Ь+ 2Ь ) - (101)- 21) ) + 41) , где 10) - напряжение ячейки, соответству ющее предварительному натяжению магнитопровода. Поперечные горизонтальные силы, вызвацные боковым давлением колес на рельсы или ударным взаимодействием колеса с рельсом.
передаются от весовой платформы на фундамент через натяжные струны 6 и силоизмерительные датчики 8,
При натяжении струна внешним концом через муфту 19 воздействует на датчик, вы- 5 зывая дополнительное удлинение его магнитопровода, пропорциональное действующему значению силы, растягивающей струру. Другой конец струны в этот момент свободно скользит в муфте, не оказывая влияния на Ю противоположный силоизмерительный датчик 8.
Таким образом, в зависимости от направления поперечной силыР на вход регистрирующего прибора подаются сигналы или от правой группы датчиков, или от левой. В неко- 5 торых случаях полезный сигнал может поступать одновременно от двух датчиков, расположенных на диагонали платформы, что свидетельствует о наличии силового момента вокруг вертикальной оси Z .20
Вертикальные усилия, действующие на платформу, воспринимаются весовыми датчиками 3 с идентичными характеристиками.
Выходной суммарный сигнал этих датчиков содержит кроме постоянной составляющей,5 1971 (прототип).
соответствующей весу ооъекта, и вертикальную динамическ то состаачяющую, обусловленную взаимодействием объекта с весовой платформой.
Формула изобретения
Трехкомпэпентные платформенные весы по авт. СБ. ,94323-47, о т л и ч а ю щ н- е с я тем, что, с целью обеспечения возможности использования их для проведения экспериментальных исследований, они снабжены динамометр11ческнм устройством для измерения поперечных горизонтальных сил, выполненным в виде датчиков растяжения, закрепленных в 5;рецваритель ю напряженном СОСТОЯЛИ на фунцзл;ент1эй .Лите i установ- ленкрлх на продолжени -; внешнего KOiiua нл - тяжной сгруны.
Источники информации, пр4И{ятые во внимание при экспертизе:
///////////// i/
