(54) АВТОМАТИЧЕСКИЕ ВЕСЫ ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное устройство | 1931 |
|
SU34015A1 |
| Бензинораздаточная колонка | 1936 |
|
SU52910A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДЕЙСТВИЯ ЖЕЛЕЗНОДОРОЖНЫХ ПУТЕВЫХ ТОРМОЗОВ СОРТИРОВОЧНЫХ ГОРОК | 1933 |
|
SU48511A1 |
| УСТРОЙСТВО для СЧЕТА ШТУЧНЫХ ИЗДЕЛИЙ | 1971 |
|
SU308445A1 |
| Устройство для автоматического поддержания постоянной величины откачки жидкости из скважины | 1962 |
|
SU150456A1 |
| Фотоэлектрическое устройство для дистанционной регистрации веса | 1976 |
|
SU857727A1 |
| Весовой дозатор | 1991 |
|
SU1793258A1 |
| Устройство для непрерывной намотки на катушку нитеобразных материалов | 1974 |
|
SU691225A2 |
| Регистрирующее устройство | 1983 |
|
SU1125472A1 |
| Подвесная канатная дорога маятникового типа | 1984 |
|
SU1220984A2 |
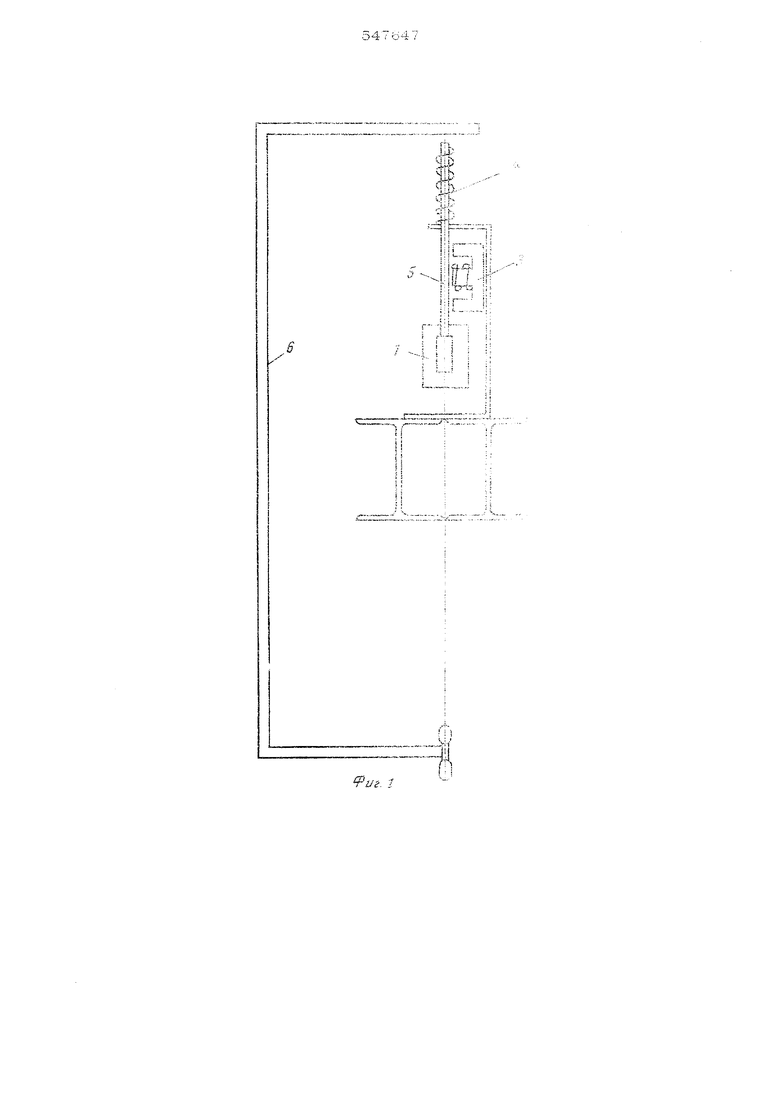
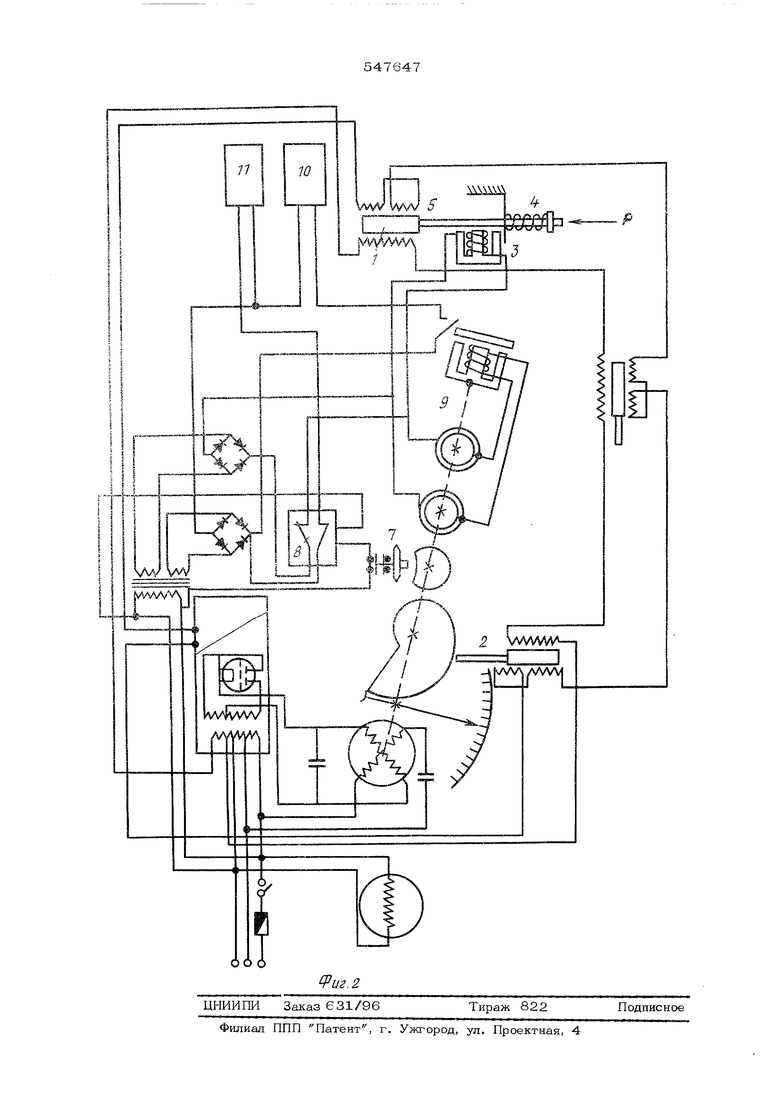
Изобретение относится к. области весоизмерительной техники. Известны устройства для взвешивакия дви жущьлся объектов, содержащие гр зоприемну платформу; С1и оизмерительнь й датчик с 6локом ynpaEfieiiHs и регистрации командных им пупьсов l, 2. Однако эти устройства не обеспечивают достаточную точность взвешивания. Наиболее близким по технической сущности является устройство, содержаяюе весоизмерительный элемент, датчик положения и вторичный прибор З. В этом устройстве вторичный прибор выполнен в виде счетчика, на котором ведется отсчет единиц в тоннах. Однако по такому прибору невозможно судить о весе отдельной вагонетки с допустимой точностью; при движ нии вагонетки по канатной дороге со скоростью 2 м в 1 сек длительность представительного сигнала по времени составит всего лишь О,О5 сек. При большой инерционности измерительной аппаратуры таким коротким сигналом трудно получить достоверные измефиксирова 1кя и задержки значокля nporuba на иеобходимое для измереиш втортчЕым прибором, Зто достлгаетск тел-;, что датчик полож&ния содерж;:Г электро шгнитный тормоз, управляемый вторпчнь;м прибором, и илгок, соединенньпЗ с ааук.жером диффереидя шьш траасформаторкой катушки вторичного ир гбора; шток своей плоскостью соприкасается с плоскостью электромагнитного тормоза и яв ляется.якорем этого тормоза. На фиг. 1 схематически изображено предложенное устройство; ка фиг. 2 - принципиальная схема автоматических весов подвесной канатной дороги. Датчик автоматических весов содержит катушку 1, которая вместе с катушкой 2 вторичного прибора включены в дифференодиальHJTO трансформаторную схему, электромагнитный тормоз 3, возвратную пружину 4, шток 5, жестко соединенный с плунжеров- катушки 1, и кронштейн 6.
:.:f:,: .;.;;::-;jл ИJ концевой вык:;-; j.K.;. л размылючаге;;-т
-:; и: - IM/e nil -1/.} HlTGIкакие , i :; : :-5-J и, -. ;iK Ю холи- ри.рук. V. i
4viK il 1л:л-.; ВУЬС ;;о;1-;ЫХ честьа .. ;
Biir-OHt-yi; -;.
РаииГч;;;ч устройся .во следующим обризол-., LkiroijuTixe д:1и;;отся, iib pHMep- по XdO-iCрельсу. npuruDrti. oru,.
ikiji s:;;., г;р1ЛМ1 л1, ;1рО|Юрциокал}: кая secy D;,: oiL-iivii. )Опм/тойиолч о передается штоку j LiVA.cTKO соацйнеаному с ппу:чжеро KaTvi:;r:u 1, О; соприкасаясь своей плсск-о:. C-.I-; с ::-:c:,bpx;jccTbio э;;.ект эоЛ:(агии -HoroTop.Mi ;:; С .rib.ii моза.
Перса вС;у: ,1Иь;:иаем элехтромагнитный тормоз 3 ;i .чи К-троыагнчтная муфта ик7ег-
ты рел/: вре/лон.и 8 включены. Поэтому шток 3, tщ;;le - ;:cт шшиcь на величину прогиба мо норельсд,Дер; ИЕабтся электромагнитным томоз 3.
iicpcMe/iieHKe дяуижера в катушке 1 пркводкг к иэмерегшю вторичным прибором вели-:-.,i с гог-о irepeixjOLueEiUH. При этом стрелка на 1., от-лд;);|дукроваЕНОЙ в единицах веса, ГОКазывает Беличкиу веса вагонетки, перо perMcipSipyoT эту величику на диаграмме, злектромгдитчтЕая муфта вместе с якорем поворачивается аа угол, соответствующ весу Баго;1ет.ки,
На окружности якоря электромагнитной муфты через каждь;е 120 располагаются штифты, котопые при повороте стрелки на каждые 12 О замыкают лмикрококцевой выключатель счетчика 10 суммирования веса и на счетчике добавляется единица веса.
3 начале движения стрелки от нуля к
максимуму профилированным диском включается кокцевой выключатель 7, через н. о, контаклЬ которого включается реле времени 8. Выбрав время установки, оно разрывает цепь питания электромагнитного тормоза 3, электромагнитной муфты интегратора и замыкает цепь счетчика 11.
Отключенный электромагнитный тормоз 3 освобождает шток 5, который под действием иружины перемещается в нулевое положение, прижимается к кронштейну 6. Отключеи -:ая электромагкишая муфтб освобождает якорь-диск, который под пекстБием пружины прижимается к Kopuycv остается ieno/JBH/KHb)M, liSpeivieaibHKe штиха л roiyu жера лр;;Б;;1ДИт к перемещению стрелки, пера I алсктро.шгдитной муфты ИЕ1тегратор& ;bi нулевую отметку,
;ip;: дв ткссга: стрелки х иуяевой отметке .: -лг:роз;- ;гь:1 диск осзобо кдсет штифт концеaoi-о выключателя 7, когорь;й -юрез ьыдержку вре1-.«;кн 3 сек отклк чает реле времени 8„
Р-еле времени 8 А, з контактами включает ; :чектрома1 нитпь;й тормоо 3 и электрсмагннтную муфту ;-штогрс1Тора 9; ii. о, кон1актами отключает счьтчкк 11, на котороедобавляется единица. 1й этсм операция взвеливадяя зака1гЧ11ваетсй, устройство готово Ц;я очередкогО взвешивани;;.
Ф о р м у л а и 3 о о р е т е н и я
натной дороги, содержащие весоиомерительный элемент датчик поло;кония, вторичный прибор, о т л и ч а ю ;л п е с; я тем, что, с целью расширения функциональных возможностей, датчик положения содержит электромагнитный тормоз, управпяедмый вторичным прибором, и шток, соединенный с плунжером дифференциально-трансформаторной катушки вторичного прибора.
Источники информации, принятые во внимание при экспертизе:
