Изобретение относится к транспортным средствам, может быть применено для механизации транспортно-складских работ на базе канатной дороги в сельском хозяйстве, промышленности и строительстве и является дополнительным к основному авт. св. № 1110693.
Цель изобретения - повышение производительности канатной дороги путем увеличения скорости движения грузовой тележки в положении порожняком.
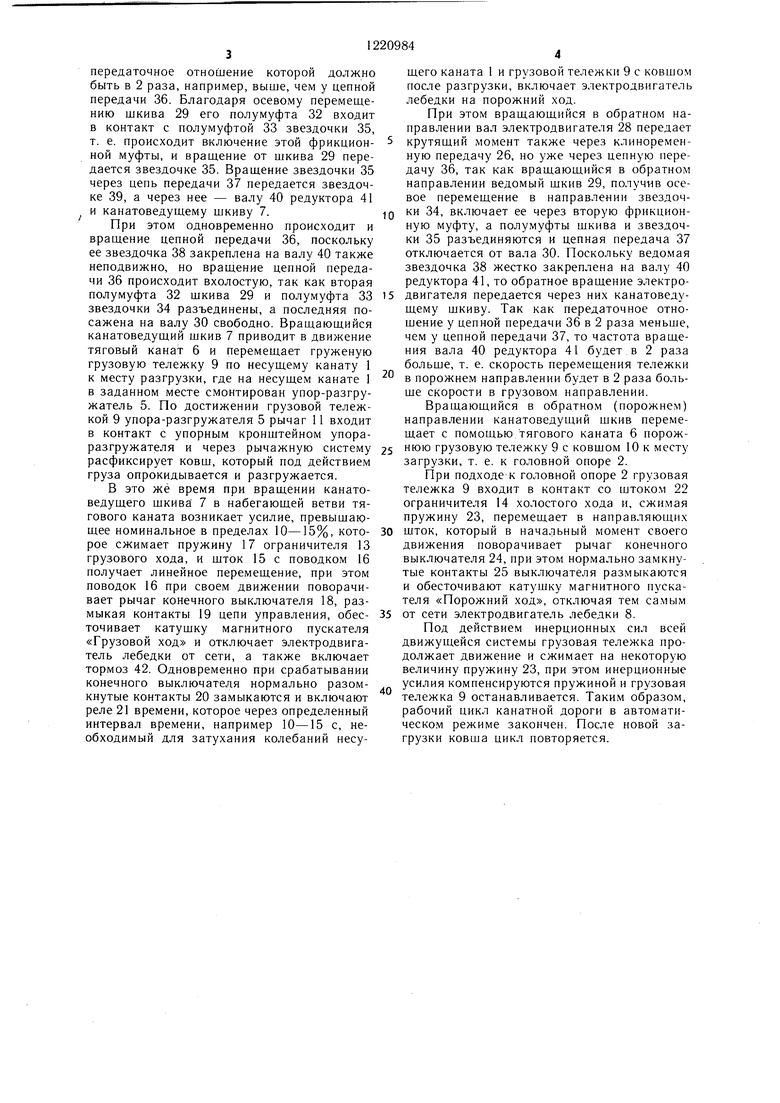
На фиг. 1 схематично изображена канатная дорога маятникового типа; на фиг. 2-- кинематическая схема дополнительного устройства.
Подвесная канатная дорога состоит из
10
помещенного в направляющую пружину 23, удерживающую шток в исходном положении, и дополнительного конечного выключателя 24, нормально замкнутые контакты 25 которого включены в цепь управления обратным ходом электродвигателя лебедки. Тяговый канат б обводится через канатове- душий шкив 7, обводные блоки натяжного устройства и ограничителя грузового хода на головной опоре, а также обводные блоки на промежуточной и тыловой опорах, и крепится концами к грузовой тележке, замыкаясь на ней в кольцо.
Для обеспечения автоматического переключения скоростей движения тягового каната, а следовательно, и грузовой тележки.
несущего каната I с закрепленными концами 5 при смене режима работы канатной дороги (натяжное устройство несущего каната не показано), навещанного на башмаки головной 2, тыловой 3 и промежуточных 4 опор, упора-разгружателя 5, закрепляемого на несущем канате 1 в любой точке пролета и обеспечивающего разгрузку ковша с несущего каната, замкнутого в кольцо тягового каната 6 и приводимого в движение канато- ведущим шкивом 7 приводной электролебедки 8, и грузовой тележки 9 с ковшом 10 опрокидного типа.
Грузовая тележка 9 снабжена подпружиненным фиксатором от спадания с несущего каната 1, обеспечивающего также беспрепятственный проход тележки 9 через башмак промежуточной опоры 4, и известс рабочего хода на порожний и наоборот служит дополнительное устройство, включенное в кинематическую цепь лебедки между электродвигателем и редуктором, которое 2Q состоит из клиноременной передачи 26, ведущий щкив 27 которой жестко закреплен на валу асинхронного электродвигателя 28, а ведомый ее щкив 29 смонтирован на валу 30 с помощью винтовой пары 31, чем обеспечивается осевое перемещение шкива в начальный момент вращения.
К шкиву 29 жестко прикреплены полумуфты 32 фрикционных муфт, вторые полумуфты 33 которых также жестко закреплены на ведущих звездочках 34 и 35 одинаковых размеров цепных передач 36 и 37 соответст25
ным рычажным механизмом, расфиксирую- 30 венно, причем звездочки 34 и 35 свободно
щим ковщ 10 при контакте рычага 11 с упо- ром-разгружателем 5 при разгрузке ков- ща 10.
Привод канатоведущего щкива 7 электролебедки 8 осуществляется от асинхронного электродвигателя с помощью магнитных пускателей (не показаны).
На головной опоре 2 смонтированы и включены в систему тягового каната натяжное устройство 12 и ограничитель 13 грузопосажены на валу 30 и снабжены упорными подщипниками. Ведущие звездочки 38 и 39 выполнены разных- размеров соответственно передаточным числам цепных передач и закреплены на входном валу 40 червячного редуктора 41 неподвижно, кроме того, на этом же валу закреплен и колодочный, например, тормоз 42.
Совокупность описанных устройств подвесной канатной дороги маятникового типа
вого хода. Кроме того, на головной опоре о обеспечивает автоматизацию ее рабочего
цикла и работу с различными скоростями движения тележки во время рабочего и порожнего ходов.
Подвесная канатная дорога маятникового типа работает следующим образом. После загрузки ковша 10 у головной опоры, (например навозом на животноводческой ферме с помощью наклонного транспортера), нажатием вручную кнопки «Пуск включают электродвигатель лебедки 8 на грузовой ход. При этом крутящий момент от электродвиле 21 времени, обеспечивающему включение гателя 28 через дополнительное устройство
, .40
смонтирован ограничитель 14 холостого хода
грузовой тележки 9.
Ограничитель 13 грузового хода состоит из системы неподвижных и подвижного блоков, огибаемых тяговым канатом штока 15 с поводком 16 и регулируемой на заданное 45 усилие пружины 17, конечного выключателя 18, нормально замкнутые контакты 19 которого включены в цепь управления грузовым ходом электродвигателя, а нормально
разомкнутые контакты 20 подключены к ре50
электродвигателя на порожний ход через заданный интервал времени после срабатывания конечного выключателя 18.
Ограничитель 14 хода служит для остаи редуктор передается канатоведущему шкиву 7. Происходит это следующим образом. Вращение от вала электродвигателя 28 через шкив 27 клиноременной передачи 26 переновки грузовой тележки 9 при ее подходе, дается ведомому шкиву 29, который, врак головной опоре 2 и снижения динамическихщаясь на резьбовой части вала 30 винтовой
явлений в тяговом канате 6 после остановкипары 31, получает осевое перемещение, -нагрузовой тележки 9 и состоит из щтока 22,пример, к звездочке 35 цепной передачи 37,
помещенного в направляющую пружину 23, удерживающую шток в исходном положении, и дополнительного конечного выключателя 24, нормально замкнутые контакты 25 которого включены в цепь управления обратным ходом электродвигателя лебедки. Тяговый канат б обводится через канатове- душий шкив 7, обводные блоки натяжного устройства и ограничителя грузового хода на головной опоре, а также обводные блоки на промежуточной и тыловой опорах, и крепится концами к грузовой тележке, замыкаясь на ней в кольцо.
Для обеспечения автоматического переключения скоростей движения тягового каната, а следовательно, и грузовой тележки.
при смене режима работы канатной дороги
при смене режима работы канатной дороги
с рабочего хода на порожний и наоборот служит дополнительное устройство, включенное в кинематическую цепь лебедки между электродвигателем и редуктором, которое состоит из клиноременной передачи 26, ведущий щкив 27 которой жестко закреплен на валу асинхронного электродвигателя 28, а ведомый ее щкив 29 смонтирован на валу 30 с помощью винтовой пары 31, чем обеспечивается осевое перемещение шкива в начальный момент вращения.
К шкиву 29 жестко прикреплены полумуфты 32 фрикционных муфт, вторые полумуфты 33 которых также жестко закреплены на ведущих звездочках 34 и 35 одинаковых размеров цепных передач 36 и 37 соответст
венно, причем звездочки 34 и 35 свободно
венно, причем звездочки 34 и 35 свободно
посажены на валу 30 и снабжены упорными подщипниками. Ведущие звездочки 38 и 39 выполнены разных- размеров соответственно передаточным числам цепных передач и закреплены на входном валу 40 червячного редуктора 41 неподвижно, кроме того, на этом же валу закреплен и колодочный, например, тормоз 42.
Совокупность описанных устройств подвесной канатной дороги маятникового типа
обеспечивает автоматизацию ее рабочего
и редуктор передается канатоведущему шкиву 7. Происходит это следующим образом. Вращение от вала электродвигателя 28 через шкив 27 клиноременной передачи 26 передается ведомому шкиву 29, который, врапередаточное отношение которой должно быть в 2 раза, например, выше, чем у цепной передачи 36. Благодаря осевому перемещению шкива 29 его полумуфта 32 входит в контакт с полумуфтой 33 звездочки 35, т. е. происходит включение этой фрикционной муфты, и врашение от шкива 29 передается звездочке 35. Вращение звездочки 35 через цепь передачи 37 передается звездочке 39, а через нее - валу 40 редуктора 41 и канатоведущему шкиву 7.
При этом одновременно происходит и вращение цепной передачи 36, поскольку ее звездочка 38 закреплена на валу 40 также неподвижно, но вращение цепной передачи 36 происходит вхолостую, так как вторая полумуфта 32 шкива 29 и полумуфта 33 15 звездочки 34 разъединены, а последняя посажена на валу 30 свободно. Вращающийся канатоведущий шкив 7 приводит в движение тяговый канат 6 и перемещает груженую грузовую тележку 9 по несущему канату 1 к месту разгрузки, где на несущем канате 1 в заданном месте смонтирован упор-разгру- жатель 5. По достижении грузовой тележкой 9 упора-разгружателя 5 рычаг 11 входит в контакт с упорным кронштейном упора- разгружателя и через рычажную систему расфиксирует ковш, который под действием груза опрокидывается и разгружается.
В это же время при вращении канато- ведущего щкива 7 в набегающей ветви тягового каната возникает усилие, превышающее номинальное в пределах 10-15%, кото- 30 рое сжимает пружину 17 ограничителя 13 грузового хода, и шток 15 с поводком 16 получает линейное перемещение, при этом поводок 16 при своем движении поворачивает рычаг конечного выключателя 18, разщего каната 1 и грузовой тележки 9 с после разгрузки, включает электродв лебедки на порожний ход.
При этом вращающийся в обрат правлении вал электродвигателя 28 п 5 крутящий момент также через клин ную передачу 26, но уже через цепну дачу 36, так как вращающийся в об направлении ведомый шкив 29, получ вое перемещение в направлении з
1Q ки 34, включает ее через вторую фр ную муфту, а полумуфты шкива и з ки 35 разъединяются и цепная перед отключается от вала 30. Поскольку в звездочка 38 жестко закреплена на редуктора 41, то обратное вращение э двигателя передается через них кана щему шкиву. Так как передаточно шение у цепной передачи 36 в 2 раза м чем у цепной передачи 37, то частота ния вала 40 редуктора 41 будет в больше, т. е. скорость перемещения т
в порожнем направлении будет в 2 раз ще скорости в грузовом направлении
Вращающийся в обратно.м (пор направлении канатоведущий шкив щает с помощью тягового каната 6
25 нюю грузовую тележку 9 с ковшом 10 загрузки, т. е. к головной опоре 2.
При подходе к головной опоре 2 гр тележка 9 входит в контакт со щто ограничителя 14 холостого хода и, с пружину 23, перемещает в направл шток, который в начальный момент движения поворачивает рычаг ко выключателя 24, при этом нормально з тые контакты 25 выключателя размы и обесточивают катушку магнитного теля «Порожний ход, отключая тем
мыкая контакты 19 цепи управления, обес- 35 от сети электродвигатель лебедки 8.
Под действием инерционных си движущейся системы грузовая тележ должает движение и сжимает на нек величину пружину 23, при этом инерц усилия компенсируются пружиной и гр тележка 9 останавливается. Таким об рабочий цикл канатной дороги в авт ческом режиме закончен. После нов грузки ковша цикл повторяется.
точивает катушку магнитного пускателя «Грузовой ход и отключает электродвигатель лебедки от сети, а также включает тормоз 42. Одновременно при срабатывании конечного выключателя нормально разомкнутые контакты 20 замыкаются и включают реле 21 времени, которое через определенный интервал времени, например 10-15 с, необходимый для затухания колебаний несу5
щего каната 1 и грузовой тележки 9 с ковшом после разгрузки, включает электродвигатель лебедки на порожний ход.
При этом вращающийся в обратном направлении вал электродвигателя 28 передает крутящий момент также через клиноремен- ную передачу 26, но уже через цепную передачу 36, так как вращающийся в обратном направлении ведомый шкив 29, получив осевое перемещение в направлении звездочQ ки 34, включает ее через вторую фрикционную муфту, а полумуфты шкива и звездочки 35 разъединяются и цепная передача 37 отключается от вала 30. Поскольку ведомая звездочка 38 жестко закреплена на валу 40 редуктора 41, то обратное вращение электродвигателя передается через них канатоведущему шкиву. Так как передаточное отношение у цепной передачи 36 в 2 раза меньше, чем у цепной передачи 37, то частота вращения вала 40 редуктора 41 будет в 2 раза больше, т. е. скорость перемещения тележки
в порожнем направлении будет в 2 раза боль- ще скорости в грузовом направлении.
Вращающийся в обратно.м (порожнем) направлении канатоведущий шкив перемещает с помощью тягового каната 6 порож5 нюю грузовую тележку 9 с ковшом 10 к месту загрузки, т. е. к головной опоре 2.
При подходе к головной опоре 2 грузовая тележка 9 входит в контакт со щтоком 22 ограничителя 14 холостого хода и, сжимая пружину 23, перемещает в направляющих шток, который в начальный момент своего движения поворачивает рычаг конечного выключателя 24, при этом нормально замкнутые контакты 25 выключателя размыкаются и обесточивают катушку магнитного пускателя «Порожний ход, отключая тем самым
от сети электродвигатель лебедки 8.
Под действием инерционных сил всей движущейся системы грузовая тележка продолжает движение и сжимает на некоторую величину пружину 23, при этом инерционные усилия компенсируются пружиной и грузовая тележка 9 останавливается. Таким образом, рабочий цикл канатной дороги в автоматическом режиме закончен. После новой загрузки ковша цикл повторяется.
2В
30
Редактор И. Сегляник Заказ 1533/21
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
фиг. 2
Составитель Л. Бунаква
Техред И. ВересКорректор И. Муска
Тираж 474Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесная канатная дорога маятникового типа | 1982 |
|
SU1165604A1 |
| Подвесная канатная дорога маятникового типа | 1978 |
|
SU749716A1 |
| Подвесная канатная дорога маятникового типа | 1983 |
|
SU1096144A2 |
| Подвесная канатная дорога | 1981 |
|
SU1022843A1 |
| Подвесная канатная дорога маятникового типа | 1983 |
|
SU1110693A2 |
| Подвесная канатная дорога маятникового типа | 1979 |
|
SU927603A1 |
| Канатная трелевочная установка | 1975 |
|
SU540757A2 |
| Монорельсовая транспортная система | 1987 |
|
SU1438994A1 |
| КАНАТНАЯ ТРЕЛЕВОЧНАЯ УСТАНОВКА | 1971 |
|
SU315634A1 |
| МАЯТНИКОВАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 1967 |
|
SU202986A1 |

| Подвесная канатная дорога маятникового типа | 1983 |
|
SU1110693A2 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
