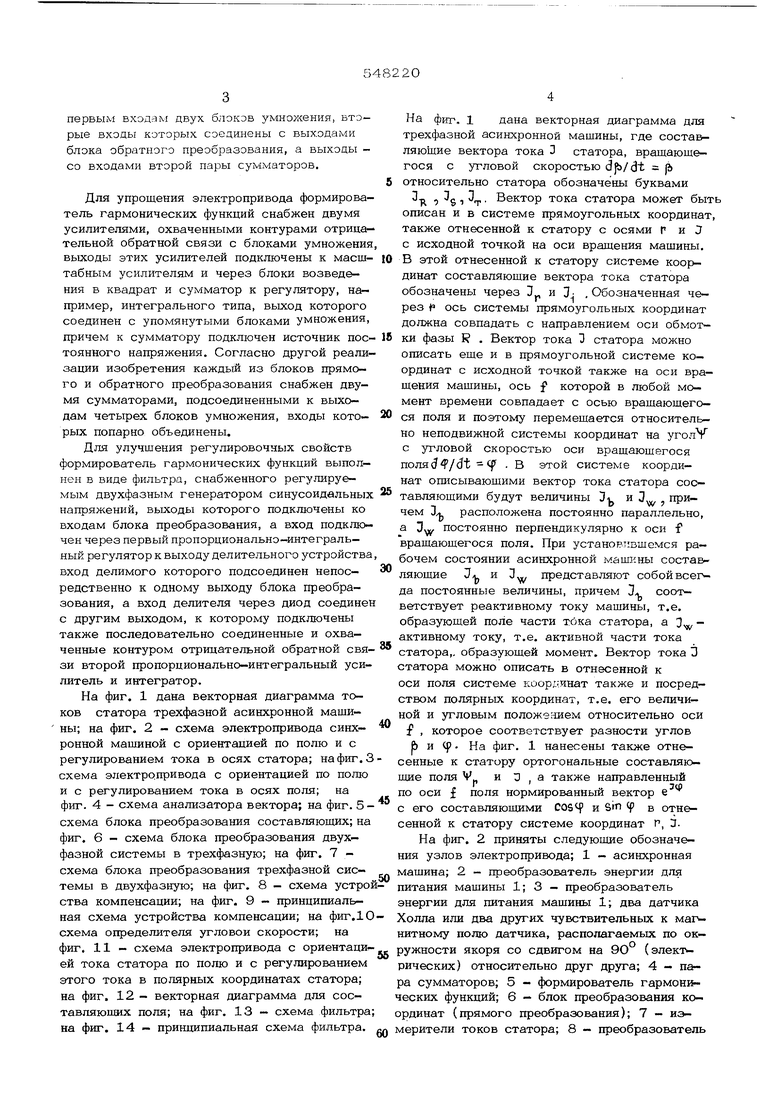
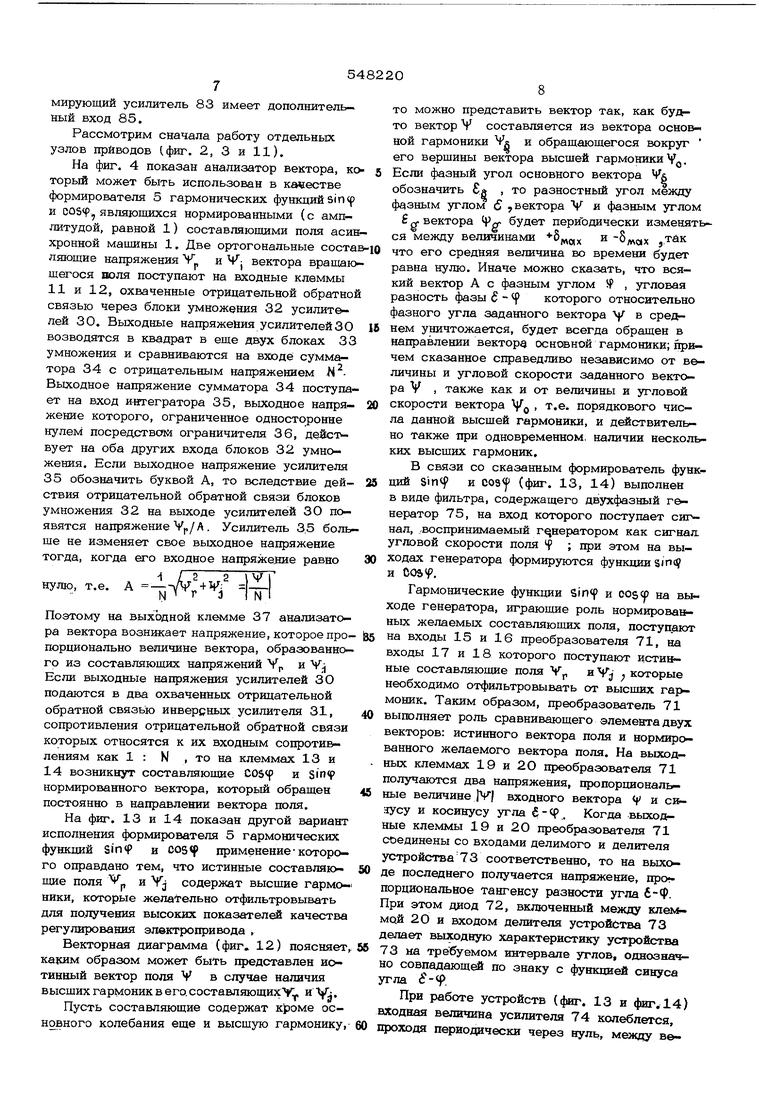
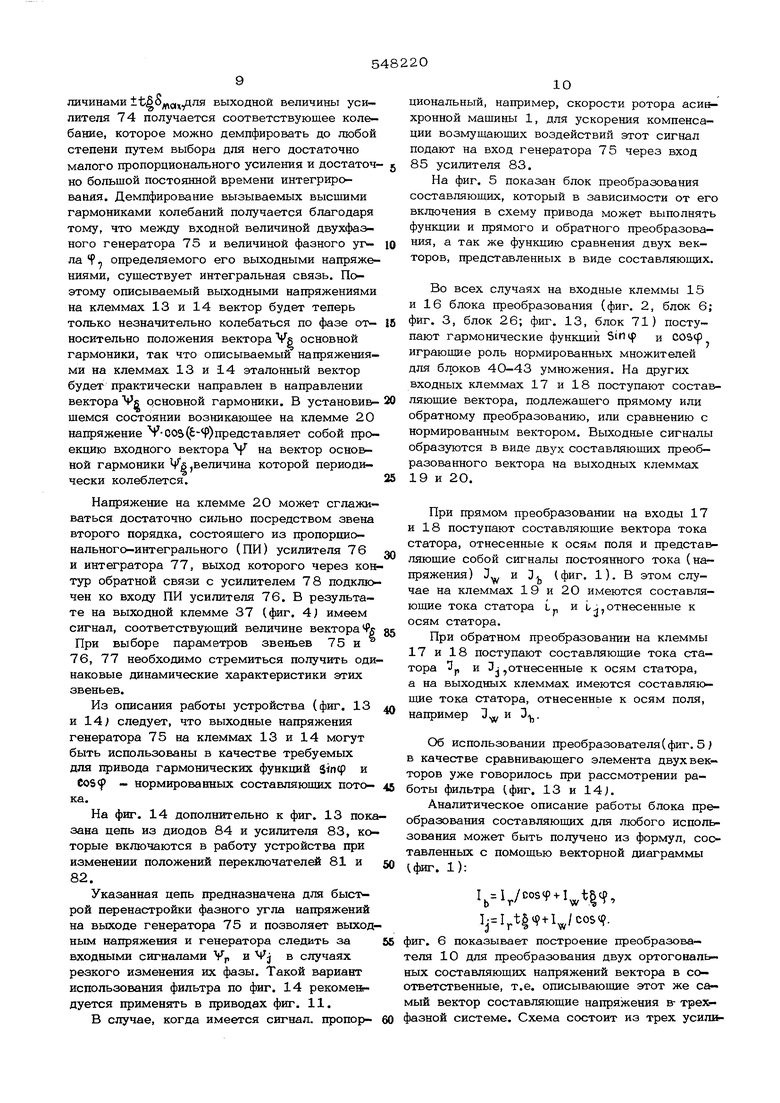
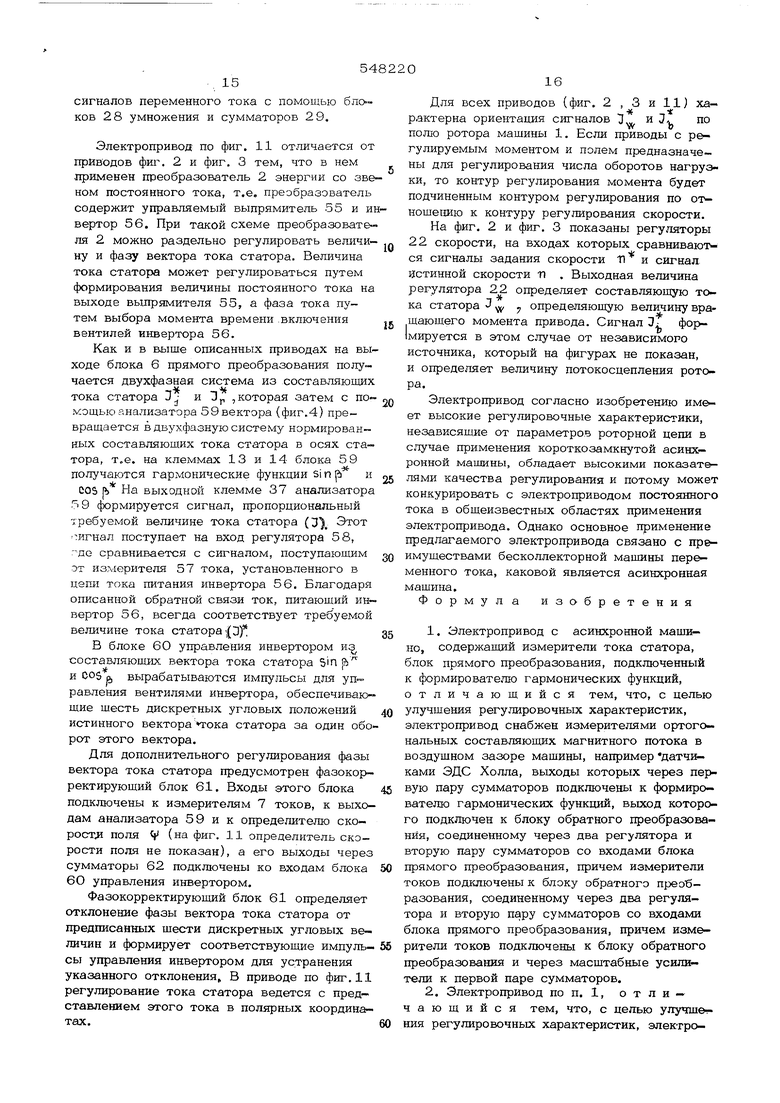
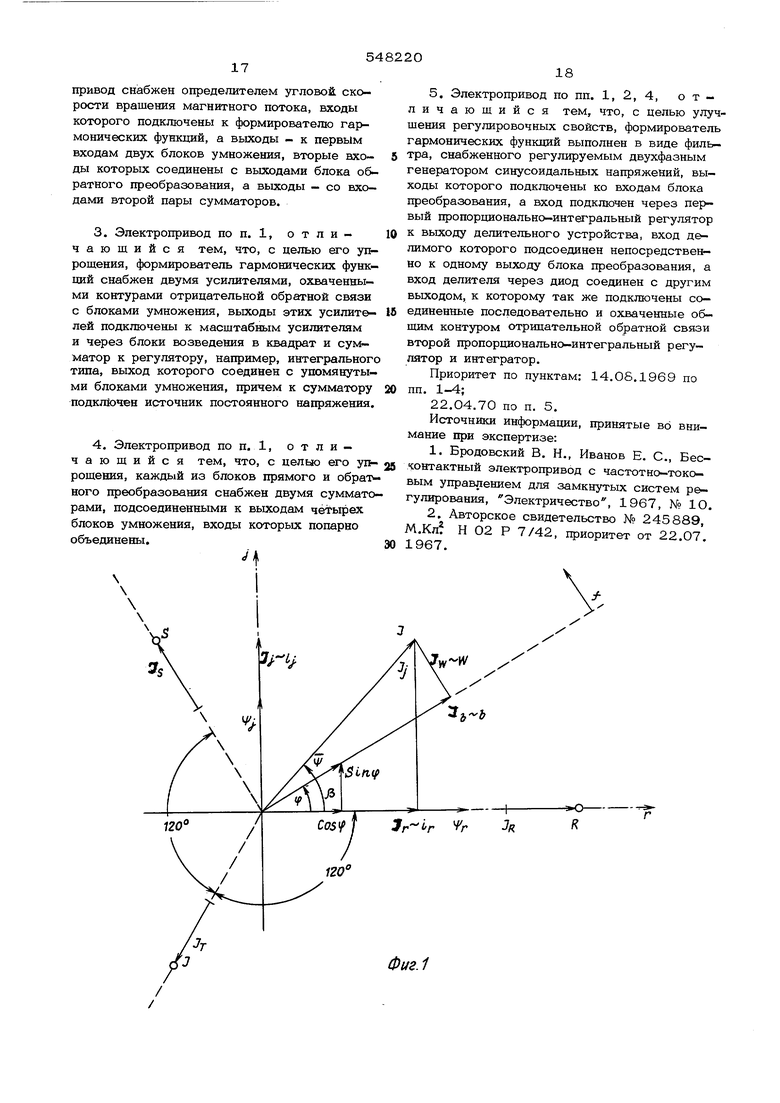
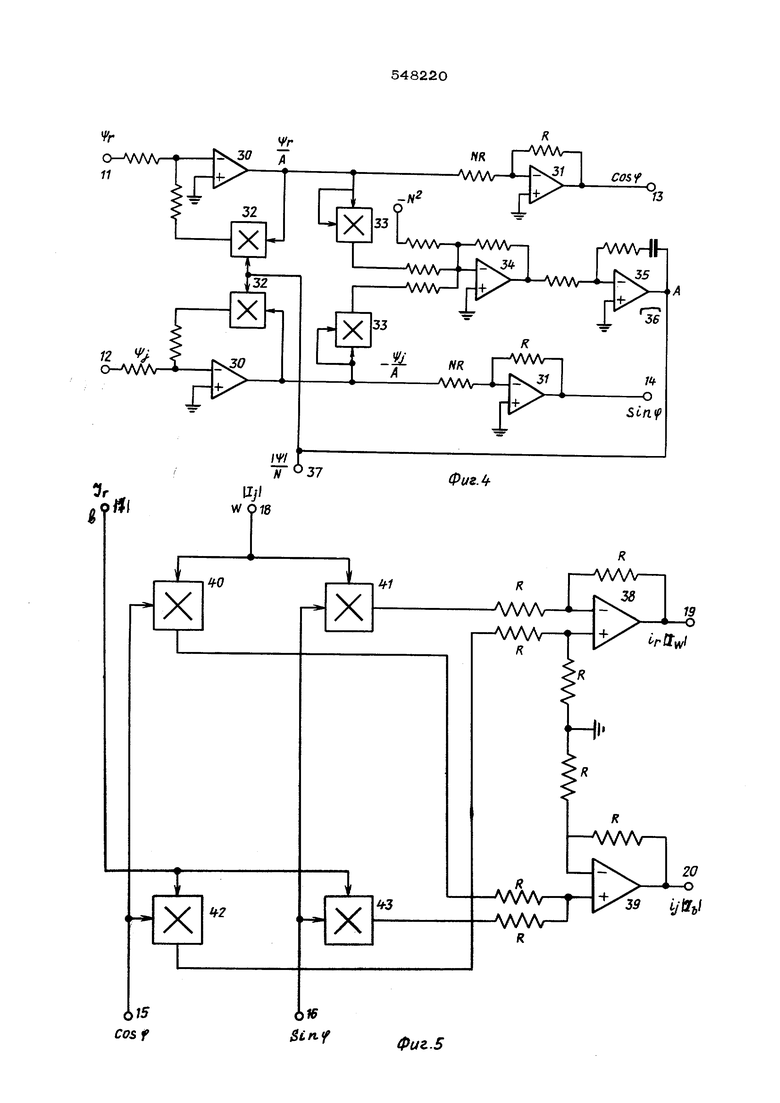
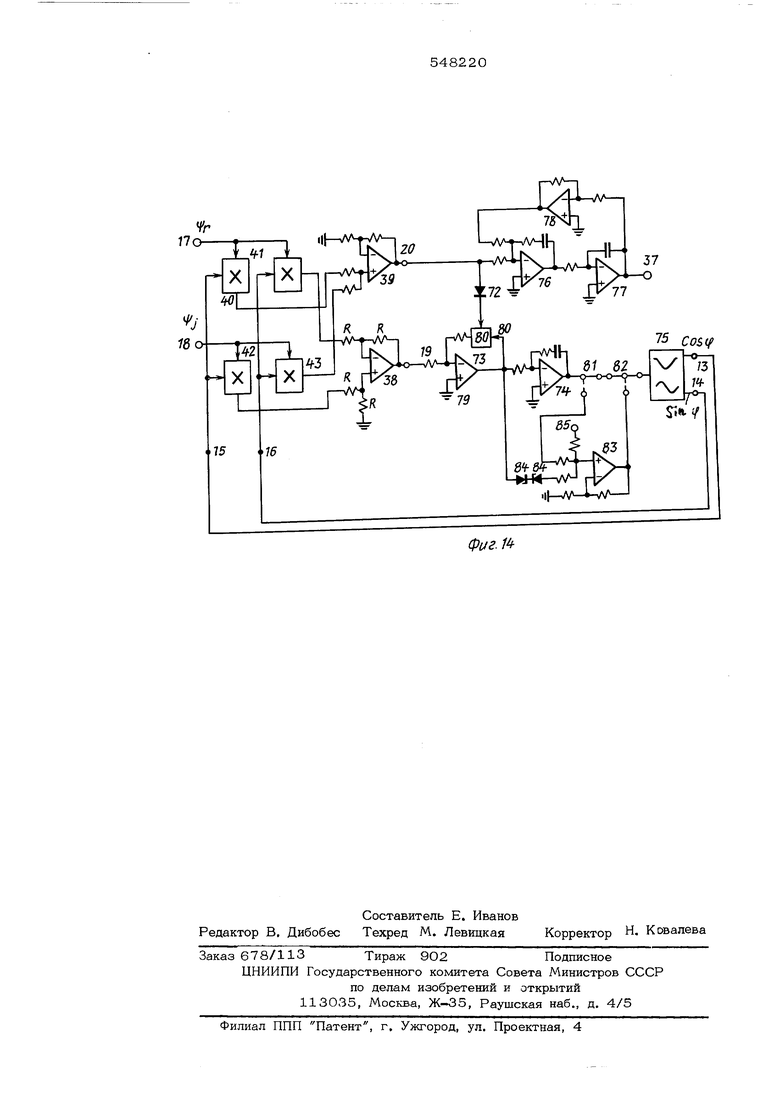
(54) ЭЛЕКТРОПРИВОД С АСИНХРОННОЙ МАШИНОЙ 3 первым входам двух блоков умножения, БТОрые входы которых соединены с выходами блока обратного преобразования, а выходы со входами второй пары сумматоров. Для упрощения электропривода формирователь гармонических функций снабжен двумя усилителями, охваченными контурами отрица- тельной обратной связи с блоками умножения, выходы этих усилителей подключены к масштабным усилителям и через блоки возведения в квадрат и сумматор к регулятору, например, интегрального типа, выход которого соединен с упомянутыми блоками умножения, причем к сумматору подключен источник постоянного напряжения. Согласно другой реализации изобретения каждый из блоков прямого и обратного преобразования снабжен двумя сумматорами, подсоединенными к выхо- дам четырех блоков умножения, входы которых попарно объединены. Для улучщения регулировочных свойств формирователь гармонических функций выпоп- йен в виде фильтра, снабженного регулируемым двухфазным генератором синусоидальных напряжений, выходы которого подключены ко входам блока преобразования, а вход подключен через первый пропорционально-интегральный регулятор к выходу делительного устройства, вход делимого которого подсоединен непосредственно к одному выходу блока преобразования, а вход делителя через диод соединен с другим выходом, к которому подключены также последовательно соединенные и охваченные контуром отрицательной обратной связи второй пропорционально-интегральный усилитель и интегратор. На фиг. 1 дана векторная диаграмма токов статора трехфазной асинхронной мащины; на фиг. 2 - схема электропривода синх- ронной мащиной с ориентацией по полю и с регулированием тока в осях статора; на фиг. 3 схема электропривода с ориентацией по полю и с регулированием тока в осях поля; на фиг. 4 - схема анализатора вектора; на фиг. 5схема блока преобразования составляющих; на фиг. 6 - схема блока преобразования двух- фазной системы в трехфазную; на фиг. 7 схема блока преобразования трехфазной сиетемы в двухфазную; на фиг. 8 - схема устрой ства компенсации; на фиг. 9 - принципиальная схема устройства компенсации; на фиг.10 схема определителя угловой скорости; на фиг. 11 - схема электропривода с ориентацией тока статора по полю и с регулированием этого тока в полярных координатах статора; на фиг. 12 - векторная диаграмма для соетавляющих поля; на фиг. 13 - схема фильтра; на фиг. 14 - принципиальная схема фильтра. 54 20 4 На фиг. 1 дана векторная диаграмма для трехфазной асинхронной машины, где составляю1яие вектора тока 3 статора, врашаюшегося с угловой скоростью djb/dt jb относительно статора обозначены буквами 3 ,3,3. Вектор тока статора может быть описан и в системе прямоугольных координат, также отнесенной к статору с осями Г и J с исходной точкой на оси вращения машины, В этой отнесенной к статору системе координат составляющие вектора тока статора обозначены через И и J. .Обозначенная через ось системы прямоугольных координат должна совпадать с направлением оси обмотки фазы R . Вектор тока D статора можно описать еще и в прямоугольной системе координат с исходной точкой также на оси врашения мащины, ось f которой в любой момент времени совпадает с осью вращающего- ся поля и поэтому перемещается относительно неподвижной системы координат на yrojiY с угловой скоростью оси вращающегося пoля((5t tf . В этой системе коорди- нат описывающими вектор тока статора составляющими будут величины J и J причем расположена постоянно параллельно, а 3 постоянно перпендикулярно к оси f вращающегося поля. При установт:вщемся рабочем состоянии асинхронной машнны составдя;ощие j J представляют собойвсегда постоянные величины, причем 1 соответствует реактивному току мащины, т.е. образующей поле части тока статора, а З активному току, т.е. активной части тока статора,, образующей момент. Вектор тока D статора можно описать в отнесенной к оси поля системе координат также и посред- ством полярных координат, т.е. его величицой и угловым положением относительно оси f которое соответствует разности углов fo и (р. На фиг. 1 нанесены также отнесенные к статору ортогональные составляюцще поля V и : , а также направленный по оси f поля нормированный вектор е с его составляющими CQZ и Sin р в отнесенной к статору системе координат Г, 3. На фиг. 2 приняты следующие обозначе- ния узлов электропривода; 1 - асинхронная мащина; 2 - преобразователь энергии для питания мащины 1; 3 - преобразователь энергии для питания мащины 1; два датчика Холла или два других чувствительных к маг нитному полю датчика, располагаемых по он- ружности якоря со сдвигом на 9О° (элект рических) относительно друг друга; 4 - пар сумматоров; 5 - формирователь гармонических функций; 6 - блок преобразования координат (прямого преобразования); 7 - иэмерители токов статора; 8 - преобразователь трехфазной системы токов в двухфазную; 9 регуляторы тока (пропорциональные); 1О преобразователь двухфазной системы сигналов в трехфазную; 11, 12 - входные клеммы блока 5; 13, 14 - выходные клеммы блока 5; 15-18 - входные клеммы блока 6; 19, 20 - выходные клеммы блока 6; 21 - масштабные усилители; 22 - регулятор скорости (интегро-пропорциональный). В электроприводе (фиг. 3) применены р&гуляторы 23 тока статора в осях, связанных с вращающимся полем. Поэтому эти регуляторы могут быть выполнены как регуляторы постоянного тока. На фиг. 3 блоки, отличные от блоков фиг.2, имеют следующие цифровые обозначения: 24 - пара блоков умножения, подключенная через пару сумматоров 25 ко входам блока 6 прямого преобразования; 26- блок преобразования координат (блок обратного преобразования); 27- определитель угловой скорости поляф 28и 29 - пара блоков умножения и пара сумматоров, которые используются в варианте электропривода без блоков 24 и сумматоров 25. Формирователь 5 гармонических функций (фиг. 4) выполнен в виде анализатора вектора, состоящего из дифференциальных усилителей 30, масщтабных усилителей 31, пары блоке® 32 умножения, используемых в контурах обратной связи усилителей ЗО, пары блоков 33 умножения, используемых для получения квадратов величин, элемента сравнения на основе дифференциального сумматора 34, пропорционально-интегрального усилит&ля 35 с ограничителем 36 выхода, выходной клеммы 37 анализатора вектора. Блок преобразования составляющих (фиг. 5 может быть использован как блок 6 прямого преобразования и как блок 26 обратного пре образования. Блок преобразования содержит дифференциальные усилители 38, 39 и блоки 40-43 умножения. Входы 15 и 16 являются входами гармо нических функций, характеризующих положе.ние одной системы координат относительно другой. Входы 17 и 18 - входы подлежащих преобразованию составляющих вектора, а клеммы 19 и 2О - выходы блока преобра- зования, на которых появляются преобразова ные составляющие. На фиг. 6 показан блок 10 преобразования двухфазной системы, например, сигналов и и и J в трехфазную систему сигналов ,Ч и и,. .Блок 1О преобразования состоит из трехдифференциальных усилителей 44, 45 и 46. Блок 8 (фиг. 7) преобразования трехфазной системы, например, сигналов U,, S и U в двухфазную систему сигналов Up и U. состоит из двух дифференциальных усилителей 47 и 48. Устройство компенсации запаздывания прохождения сигналов в приводе (фиг. 8) содержит пару сумматоров 25 (см. фиг. 3), звено 49 запаздывания первого порядка, звено 50 обратной связи и корректирующее звено 51, На фиг. 9 показана принципиальная схема устройства компенсации, где 24 - блоки умножения (см. фиг. 3). Определитель 27 угловой скорости 9 (фиг. 10) вращения поля состоит из дифференцирующих усилителей 52, блоков 53 умножения и дифференциального усилителя 54. На фиг. 11 показан вариант привода, в котором преобразователь 2 энергии выполнен в виде двух блоков: управляемого выпрямителя 55 и инвертора 56. Этот привод содержит измеритель 57 тока, регулятор 58 тока, анализатор 59 вектора (см. фиг. 4), блок 60 управления инвертором, фазокорректируюший блок 61, сумматоры 62, входные клеммы 63, 64 и выходные клеммы 65-70 блока 60. На фиг. 12 показана векторная диаграмма для составляющих поля. На этой фигуре вектор V характеризующий истинный вектор поля, показан с фазным углом в системе неподвижных прямоугольных координат с осями Г и j( причем Ур и Vj - составляющие эти векторы по этим осям. Фильтр (фиг. 13), используемый в качестве формирователя 5 гармонических функций, состоит из преобразователя 71 составляющих (см. фиг. 5), диода 72, делительного устройства 73, пропорционального интегрального усилителя 74, управляемого генератора 75 двухфазного напряжения, пропорционально-интегральный усилитель 76, интегратора 77. На фиг. 14 дана принципиальная схема фильтра, на которой преобразователь 71 показан с теми цифровыми обозначениями, какие приняты на фиг. 5. Масштабный усилитель 78 включен в контур обратной связи интеграторов 76 и 77. Делительное устройство73 представлено в виде суммирующего усилителя 79, охваченного контуром обратной связи с блоком 8О умножения, один вход которого подключен к диоду 72. Контакты переключателя 81 и 82 могут принять положение, показанное штриховой линией. В этом случае в работе фильтра будет участвовать суммирующий усилитель 83, один из входов которого подключен к выходу устройства 73 через пару встречно-последовательно включенных диодов 84 зенера. Суммирующий усилитель 83 имеет дополнительный вход 85. Рассмотрим сначала работу отдельных узлов приводов (фиг. 2, 3 и 11). На фиг. 4 показан анализатор вектора, ко торый может быть использован в качестве формирователя 5 гармонических функций si и COS9, являющихся нормированными (с амплитудой, равной 1) составляюншми поля асин хронной машины 1. Две ортогональные соста ляюшие напряжения V и Vj вектора вращак р щегося поля поступают на входные клеммы 11 и 12, охваченные отрицательной обратной связью через блоки умножения 32 усилителей 30. Выходные напряжения усилителей 30 возводятся в квадрат в еще двух блоках 33 умножения и сравниваются на входе сумматора 34 с отрицательным напряжением М Выходное напряжение сумматора 34 поступает на вход инггегратора 35, выходное напряжение которого, ограниченное односторонне нулем посредством ограничителя 36, дейст вует на оба других входа блоков 32 умножения. Если выходное напряжение усилителя 35 обозначить буквой А, то вследствие действия отрицательной обратной связи блоков умножения 32 на выходе усилителей 30 появятся напряжение VP/А . Усилитель 3.5 боль ще не изменяет свое выходное напряжение тогда, когда его входное напряжение равно нулю, т.е. Поэтому на выходной клемме 37 анализатора вектора возникает напряжение, которое пропорционально величине вектора, образованного из составляющих напряжений Yp и V.J Если выходные напряжения усилителей ЗО подаются в два охваченных отрицательной обратной связью инверрных усилителя 31, сопротивления отрицательной обратной связи которых относятся к их входным сопротивлениям как 1 : N , то на клеммах 13 и 14 возникнут составляющие и нормированного вектора, который обращен постоянно в направлении вектора поля. На фиг. 13 и 14 показан другой вариант исполнения формирователя 5 гармонических функций и применение-которого оправдано тем, что истинные составляк щие поля „ и YJ содержат высшие гармоНИКИ, которые желательно отфильтровывать для палучения высоких показателей качества регулирования электропривода , Векторная диаграмма (фиг. 12) поясняет каким образом может быть представлен иотинный вектор поля V в случае наличия высщих гармоник в его. составляющих Yp и V. Пусть составляющие содержат кроме основного колебания еще и высшую гармонику, то можно представить вектор так, как будто вектор V составляется из вектора основной гармоники Vg и обращающегося вокруг его верщины вектора высшей гармоники YQ. Если фазный угол основного вектора А обозначить 3 , то разностный угол между фазным углом 6 , вектора V и фазным углом В рс вектора будет периодически изменяться между величинами 5j«o(x ,х J. что его средняя величина во времени будет равна нулю. Иначе можно сказать, что всякий вектор А с фазным углом , угловая разность фазы - которого относительно фазного угла заданного вектора Y в среднем у1ЕШЧтожается, будет всегда обращен в направлении вектора основной гармоники; причем сказанное справедливо независимо от в&личины и угловой скорости заданного вектора V , также как и от величины и угловой скорости вектора V , т.е. порядкового числа данной высшей гармоники, и действительно также тфи одновременном, наличии нескольких высших гармоник. В связи со сказанным формирователь функций и соз (фиг. 13, 14) выполнен в виде фильтра, содержащего двухфазный г&нератор 75, на вход которого поступает сигнал, .воспринимаемый генератором как сигнал, угловой скорости поля Ч ; при этом на выходах генератора формируются функции sin и . Гармонические функции Sinf и ocs на выходе генератора, играюЕше роль нормированных желаемых составляющих поля, поступают на входы 15 и 16 преобразователя 71, на входы 17 и 18 которого поступают составляющие поля V и V-j которые необходимо отфильтровывать от высших гар моник. Таким образом, преобразователь 71 выполняет роль сравнивающего элемента двух векторов: истинного вектора поля и нормированного желаемого вектора поля. На выходных клеммах 19 и 2О преобразователя 71 получаются два напряжения, пропорционалв ные величине JVJ входного вектора V и сияусу и косинусу угла б-Ч. Когда выходные клеммы 19 и 20 преобразователя 71 соединены со входами делимого и делителя устройства 73 соответственно, то на выходе последнего получается напряжение, про-порциональное тангенсу разности угла 6-ф. При этом диод 72, включенный между 2О и входом делителя устройства 73 делает выходную характеристику устройства 73 на тре15уемом интервале углов, однозначно совпадающей по знаку с фуюсцией синуса угла . При работе устройств (фиг. 13 и фиг. 14) входная величина усилителя 74 колеблется, проходя периодически через нуль, между в&9личинами ttSOj ji nfl выходной величины усилителя 74 получается соответствующее колебание, которое можно демпфировать до любой степени путем выбора для него достаточно малого пропорционального усиления и достаточ- 5 но большой постояпксной времени интегрирования. Демпфирование вызываемых высшими гармониками колебаний получается благодаря тому, что между входной величиной двухфа&ного генератора 75 и величиной фазного yi ю ла f. определяемого его выходными напряжениями, существует интегральная связь. Поэтому описываемый выходными напряжениями на клеммах 13 и 14 вектор будет теперь только незначительно колебаться по фазе 16 носительно положения вектора Vg основной гармоники, так что описываемый напряжениями на клеммах 13 и 14 эталонный вектор будет практически направлен в направлении вектора Vg, рсновной гармоники. В установив- 20 шемся состоянии возникающее на клемме 20 напряжение У-С05(6-9)представляет собой проекцию входного вектора Y на вектор основной гармоники Vs,величина которой периодически колеблется. Напряжение на клемме 20 может сглаживаться достаточно сильно посредством звена второго порядка, состоящего из пропорцио- нального-интегрального (ПИ) усилителя 76 -.. И интегратора 77, выход которого через ковн тур обратной связи с усилителем 78 подключен ко входу ПИ усилителя 76. В результате на выходной клемме 37 (фиг. 4) имеем сигнал, соответствующий величине вектора Ф/ При выборе параметров звеньев 75 и 76, 77 необходимо стремиться получить одинаковые динамические характеристики этих звеньев. Из описания работы устройства (фиг. 13 и 14; следует, что выходные напряжения генератора 75 на клеммах 13 и 14 могут быть использованы в качестве требуемых для привода гармонических функций 31пф и CoSf - нормированных составляющих пото На фиг. 14 дополнительно к фиг. 13 показана цепь из диодов 84 и усилителя 83, которые включаются в работу устройства при изменении положений переключателей 81 и 82. Указанная цепь предназначена для быст рой перенастройки фазного угла напряжений на выходе генератора 75 и позволяет выходным напряжения и генератора следить за входными сигналами Vp и Vj в случаях резкого изменения их фазы. Такой вариант использования фильтра по фиг. 14 рекомевьдуется применять в приводах фиг. 11. В случае, когда имеется сигнал, пропор1025 ,п циональный, например, скорости ротора асинхронной машины 1, для ускорения компенсации возмущающих воздействий этот сигнал подают на вход генератора 75 через вход 85 усилителя 83. На фиг. 5 показан блок преобразования составляющих, который в зависимости от его включения в схему привода может выполнять функции и прямого и обратного преобразования, а так же функцию сравнения двух векторов, представленных в виде составляющих. Во всех случаях на входные клеммы 15 и 16 блока преобразования (фиг. 2, блок 6; Фиг- 3, блок 26; фиг. 13, блок 71) поступают гармонические функций Sintp и СОйф играющие роль нормированных множителей аля блоков 40-43 умножения. На других входных клеммах 17 и 18 поступают соста ляющие вектора, подлежащего прямому или обратному преобразованию, или сравнению с нормированным вектором. Выходные сигналы образуются в виде двух составляющих преобразованного вектора на выходных клеммах 19 и 2О. При прямом преобразовании на входы 17 и 18 поступают составляющие вектора тока статора, отнесенные к осям поля и представ ,е к осям поля и представляющие собой сигналы постоянного тока (нала1птп1Т( опппм охтияттр т rrnoTV crwunT ri rowa i . пряжения) 3 и 3 (фиг. 1). В этом случае на клеммах 19 и 2О имеются составляющие тока статора 1„ и и :,отнесенные к осям статора. т-, Р обратном преобразовании на клеммы 17 и 18 поступают составляющие тока статора р и J j,отнесенные к осям статора, а на выходных клеммах имеются составляющие тока статора, отнесенные к осям поля, например U и 1). Об использовании преобразователя(фиг.5 ; в качестве сравнивающего элемента двух векторов уже говорилось при рассмотрении работы (} льтра (фиг. Тзи Аналитическое описание работы блока преобразования составляющих для любого использования может быть получено из формул, составленных с помощью векторной диаграммы ((Ьиг ) ф. I l /cos9., + l /cos«. фиг. 6 показывает построение преобразователя 10 для преобразования двух ортогональ ных составляющих напряжений вектора в соответственные, т.е. описывающие этот же самый вектор составляющие напряжения в- трехфазной системе. Схема состоит из трех усилителей, в которые подаются составляющие напряжения U), Uj. Как и на фиг. 1, ось составляющей Up должна совпадать с осью составляющей и трехфазной системы. Это преобразование происходит по известному прави- лу за счет выбора величин сопротивлений сум мируюших усилителей 44-46. На фиг. 7 дана схема преобразования трехфазной системы составляющих U , UrH XT в двухфазную, ортогональную систему составляющих посредством двух суммирующи усилителей 47 и 48. Фиг. 8 и 9 служат для более подробного пояснения фазосмещающего действия запаздывающих звеньев и его компенсирова- ния. Пусть, например, звено 49 запаздывания первого порядка расположено в цепи ста тора в любом месте между регулирующими входами для тока статора и самим током статора и представлено в виде интегратора с отрицательной обратной связью. Константа времени запаздывания этого звена 49 отвечает времени Т и характеризует, например, константу времени поля расстояния машины. Но запаздывающее звено может быть и другого рода, например, иногда требующееся для сглаживания действительных составляющих тока статора. Рассмотрим сначала только очерченную сплошной линией часть запаздывающего звена 49 в системе координат статора. Отноше ние между входным вектором Е и выходным вектором А, которые представлены символически двумя линиями прохождения сигналов для описывающих эти векторы составляющих будет здесь выражено векторным уравнением Е-А Т Решение этого уравнения показывает, что из менение входного вектора Е на разностный вектор Д Е сопровождается изменением выходного вектора А на разностный вектор дА который направлен точно по вектору дЕ и изменяется по величине с константой времени запаздывания Т на разностный вектор д Е, Таким образом, выходной вектор следует каждому изменению входного вектора Е точно в фазе. Если же рассматривать запаздывающее звено 49 в системе координат поля, причем угловая скорость поля равна то между входной величиной EV и выходной AV получается следующее дифференциальное уравн&ние:EV-AV-JPTAV T На схеме (фиг. 8) это выражается в том что возникает дополнительно еше фиктивное звено 50 отрицательной обратной связи 50, вследствие чего выход AV больше не следует за входом EV точно в фазе, а кроме того получается и ошибка в величине. Это влияние можно компенсировать применением корректирующего звена 51 с действием, обратным действию звена 50. Это корректирующее 3iBeHo 51 должно поэтому вызывать растяжение с поворотом входного вектора в зависимости от выходного вектора, угловой скорости f оси вращающегося поля и константы времени Т. Так как действие звеньев 5О и 51 взаимно уничтожается, то соблюдается строгое соотношение между входным и выходным векторами EV и AV- Таким образом, изменение одной составляющей вектора EV,, например Е в направлении, перпендикулярном полю, сопровождается изменением выходного вектора А в том же направлении. На фиг. 9 подробно .представлено устройство компенсации. Запаздывающее звено 49 схемы фиг. 8 находится на фиг. 9 справа от линии 1-11 и состоит из конденсаторов и резисторов с величинами С и 2R такими, что его константа времени Т R С . В каждой цепи прохождения сигналов Е и Eg помещено по суммирующегому усилителю из пары торов 5 с входными напряжениями Е и Е Е и Eg составляющие напряжения вектора, причем они перпендикулярны друг другу и направление составляющей Е. смещено на 90 от направления составляющей Е в направлении вращения поля. То же самое относится к J aпpaвлeниям выходных составляк щих А и Ag. Выходная величина А, связана со входом одного из блоков 24 умножения, выход которого связан с вычитающим входом одного из суммирующих усилителей 25, а выходная величина А подается на другой из блоков 24 умножения и действует как слагаемое на входе одного из сумматоров25, Так как связанные с выходами блоков 24 входные сопротивления сумматоров 25 относятся к их сопротивлениям отрицательной обратной связи как 1 : Т, то при подаче сигнала, пропорционального угловой скорости поля, на объединенные входы блоков 24 умножения происходит растяжение с поворотом входного вектора Е , определяемого состав ляюищми Е, и Е, . При этом растяжение зависит от величины выходного вектора, угловой скорости оси вращающегося поля V и константы времени запаздывающего звена Т. Нужно еще заметить, что компенсацию кор ектирующим звеном 51 можно в принципе роизводить в любой точке вдоль пути проождения сигналов Е и Eg,более наглядно это будет пояснено при рассмотрении работы привода по фиг. 3. На фиг. 10 дана схема определителя 27 угловой скорости оси вращающегося поля. Н его входные клеммы поступают две нормиро ванные ортогональные составляющие поля. Эти входные клеммы связаны с двумя ди4 ферендирующими усилителями 52 и расположенными последовательно за ними блоками 53 умножения, выходные напряжения которых сравниваются в суммирующем усилителе 54. В результате дифференцирующего дей ствия на выходах дифферендирующих усилите лей 52 имеются напряжения - Ssinf иНсов в итоге на выходной клемме получается напряжение Ч , соответствующее угловой скорости вращающегося поля ротора. Рассмотрим теперь работу электроприводов по фиг. 2, фиг. 3 и фиг. 11. Для всех этих приводов характерно ориентирование сигналов 3 и D относитель- W Ъ J и и но оси ПОЛЯ мащины 1. Сигналы можно рассматривать в качестве входных сигналов сигналов задания) для собственно го привода, предназначенного для регулирования величины вращающего момента и вели чины поля. На фиг. 11 такой собственно привод с р гулируемым моментом показан, а на фиг. 2 и фиг. 3 такой привод получается, если не рассматривать регулятор 22 скорости. Для того, чтобы сигнал D. определял вращающий момент привода, а сигнал магнитный поток мащины 1, в приводах, по упомянутым фигурам измеряются составляющие поля в воздушном зазоре мащины 1 с помощью датчиков 3 поля, например датчико Холла. Сигналы с датчиков 3, представляющие собой двухфазную систему сигналов, суммируются с помощью первой пары сумматоров 4 с дополнительными сигналами. Эти сигналы получаются путем умножения в усилителях 21 двухфазных сигналов, соответствующих истинным токам статора, полученным путем измерения и преобразования трехфаэных токов статора с помощью измерителя 7 и преобразователя 8, на постоянные масщтабные коэффициенты величина каждого из которых определяется отнощением индуктивности рассеяния ротора к основной индуктив ности асинхронной мащины 1. На выходах сумматоров 4 имеем двухфазную систему сигналов YP и V j., которые являются составляющими вектора полного потокосцепле- ния ротора. Ориентация по потокосцеплению ротора представляется более удобной для высокоточного, динамического электропривода, чем ориентация по составляющим поля в во дущном зазоре. Составляющие поля ротора Vp и Yi поступают на входные клеммы 11 и 12 формирователя 5 гармонических функций, в качестве которого могут быть использованы либо анализатор вектора по фиг. 4, либо фильтр по фиг. 14. На выходе формирователя 5 формируется нормированный вектор поляУ е , составляющие которого являются гармоническими функциями Sinf и созф . Указанные функции используются в блоках 6 и 26 преобразования, при этом блок 6 осупреобразование сигнаществляет прямое -, лов j и J а блок 26 - обратное. В приводе по фиг. 2 сигналы на выходах 19 и 20 блока 6 являются сиг налами задания составляющих тока статора в осях статора (неподвижных относительно статора осях Г и J ) и поступают на входы регуляторов 9 фазных токов статора, на входы которых поступают также сигналы об истинных токах статора с преобразователя 8. Таким образом, в приводе по фиг. 2 регулирования тока статора производится в осях статора с помощью регуляторов 9 переменного тока, что не всегда обеспечивает требуемый диапазон регулируемых частот. В приводе по фиг. 3 с целью использования регуляторов 23 постоянного тока, которые в общем случае лучше регуляторов переменного тока, применен блок 26 обратного преобразования составляющих. На клеммах 17 и 18 этого блока поступают сигналы 1)р и 3; соответствующие инстинным значениям составляющих тока статора в осях статора. Полученные на выходных клеммах 19 и 20 истинные составляющие тока статора 3 7 в осях поля используются в качестве сигналов обратной связи по составляющим тока статора, на входах регуляторов 23, на входы которых поступают также задаваемые сос 3 и :)f Выходтавляющие тока статора ные сигналы регуляторов 23, пройдя через пару сумматоров 25, поступают на входы блока 6 прямого преобразования, выходные сигналы которого после преобразования в преобразователе 1О выполняют роль управляющих сигналов преобразователя 2 энергии. В отличие от электропривода по фиг. 2 на фиг. 3 показаны устройства, предназначенные для компенсации запаздывания сигналов в контуре регулирования тока статора, а именно блоки 24 умножения,сумматоры 25 и определитель 27угловой скорости поля (фиг. 9). Согласно фиг. 3 сигналы компенсации запаздывания поступают на входы блока 6 прямого преобразования с выходов сумматоров 25. Однако, в другом варианте сигналы компенсации могут быть сформированы в виде сигналов переменного тока с помощью ков 28 умножения и сумматоров 29. Электропривод по фиг. 11 отличается от приводов фиг. 2 и фиг. 3 тем, что в нем применен преобразователь 2 энергии со зве ном постоянного тока, т.е. преобразователь содержит управляемый выпрямитель 55 и ин вертор 56. При такой схеме преобразователя 2 можно раздельно регулировать величину и фазу вектора тока статора. Величина тока статора может регулироваться путем формирования величины постоянного тока на выходе выпр51мителя 55, а фаза тока путем выбора момента времени .включения вентилей инвертора 56. Как и в выше описанных приводах на выходе блока 6 прямого преобразования получается двухфазная система из составляющих - -. тока статора J и Jp ,которая затем с помощью анализатора 5 9 вектора(фиг.4)превращается в двухфазную систему нормированных составляющих тока статора в осях статора, т.е. на клеммах 13 и 14 блока 59 получаются гармонические функции si пр и 005 (Ь На выходной клемме 37 анализатора 5 9 формируется сигнал, пропорционгшьный требуемой величине тока статора (3). Этот оигнал поступает на вход регулятора 58, :-де сравнивается с сигналом, поступающим от измерителя 57 тока, установленного в цепи тока питания инвертора 56. Благодаря описанной обратной связи ток, питающий инвертор 56, всегда соответствует требуемой величине тока статора ) В блоке 60 управления инвертором и составляющих вектора тока статора SinjS и 005 а вырабатываются импульсы для уп равления вентилями инвертора, обеспечивающие щесть дискретных угловых положений истинного вектора п-ока статора за один обо рот этого вектора. Для дополнительного регу шрования фазы вектора тока статора предусмотрен фазокор- ректирующий блок 61. Входы этого блока подключены к измерителям 7 токов, к выходам анализатора 59 и к опреде штелю скоростд поля V (на фиг. 11 определитель скорости поля не показан), а его выходы через сумматоры 62 подключены ко входам блока 6О управления инвертором. Фазокорректирующий блок 61 определяет отклонение фазы вектора тока статора от предписанных шести дискретных угловых величин и формирует соответствующие импульсы управления инвертором для устранения указанного отклонения, В приводе по фиг. 11 регулирование тока статора ведется с представлением этого тока в полярных координатах. 54
преобразования и через масштабные усилители к первой паре сумматоров.
2. Электропривод по п. 1, отличающийся тем, что, с целью улучшегния регулировочных характеристик, электро0Для всех приводов (фиг. 2 , 3 и 11) характерна ориентация сигналов , и J. по полю ротора машины 1. Если приводы с р&гулируемым моментом и полем предназначены для регулирования числа оборотов нагрузки, то контур регулирования момента будет подчиненным контуром регулирования по отношегшю к контуру регулирования скорости. На фиг. 2 и фиг. 3 показаны регуляторы 22 скорости, на входах которых сравниваются сигналы задания скорости Т1 и сигнал истинной скорости Т) . Выходная величина регулятора 22 определяет составляющую тока статора J ., определяющую величину вращающего момента привода. Сигнал J; формируется в этом случае от независимого источника, который на фигурах не показан, и определяет величину потокосцепления ротора. Электропривод согласно изобретению имеет высокие регулировочные характеристики, независящие от параметров роторной цепи в случае применения короткозамкнутой асинхронной машины, обладает высокими показателями качества регулирования и потому может конкурировать с электроприводом постоянного тока в общеизвестных областях применения электропривода. Однако основное применение предлагаемого электропривода связано с преимуществами бесколлекторной машины переменного тока, каковой является асинхронная мащина. Формула изобретения 1. Электропривод с асинхронной ыашкно, содержащий измерители тока статора, блок прямого преобразования, подключенный к формирователю гармонических функций, отличающийся тем, что, с целью улучшения регулировочных характеристик, электропривод снабжен измерителями ортогональных составляющих магнитного потока в воздушном зазоре машины, например датч ками ЭДС Холла, выходы которых через первую пару сумматоров подключены к формирователю гармонических функций, выход которого подключен к блоку обратного преобразования, соединенному через два регулятора и вторую пару сумматоров со входами блока прямого преобразования, причем измерители токов подключены к блоку обратного преобразования, соединенному через два регулятора и вторую пару сумматоров со входами блока прямого преобразования, причем измерители токов подключены к блоку обратного привод снабжен определителем угловой скорости врашения магнитного потока, входы которого подключены к формирователю гармонических функций, а выходы - к первым входам двух блоков умножения, вторые входы которых соединены с выходами блока обратного преобразования, а выходы - со входами второй пары сумматоров. 3. Электропривод по п. 1, отличающийся тем, что, с целью его упрощения, формирователь гармонических функций снабжен двумя усилителями, охваченными контурами отрицательной обратной связи с блоками умножения, выходы этих усилителей подключены к масштабным усилителям и через блоки возведения в квадрат и сумматор к регулятору, например, интегрального типа, выход которого соединен с упомянутыми блоками умножения, причем к сумматору подключен источник постоянного напряжения, 4. Электропривод по п. 1, отличающийся тем, что, с целью его упрощения, каждый из блоков прямого и обрат ного преобразования снабжен двумя суммато рами, подсоединенными к выходам четгырех блоков умножения, входы которых попарно объединены. 5. Электропривод по пп. 1, 2, 4, отличающийся тем, что, с целью улучщения регулировочных свойств, формирователь гармонических функций выполнен в виде фильтра, снабженного регулируемым двухфазным генератором синусоидальных напряжений, выходы которого подключены ко входам блока преобразования, а вход подключен через первый пропорционально-интегральный регулятор к выходу делительного устройства, вход делимого которого подсоединен непосредственно к одному выходу блока преобразования, а вход делителя через диод соединен с другим выходом, к которому так же подключены соединенные последовательно и охваченные общим контуром отрицательной обратной связи второй пропорционально-интегральный регулятор и интегратор. Приоритет по пунктам: 14.08.1969 по пп. 1-4; 22.04.70 по п. 5. Источники информации, принятые во внимание при экспертизе: 1. Бродовский В. Н., Иванов Е. С., Бессонтактный электропривод с частотно-токовым управлением для замкнутых систем регулирования, Электричество, 1967, № 10. 2 Авторское свидетельство № 245889, М.Кл: Н 02 Р 7/42, приоритет от 22.07 1967.
Фиг.З
Фиг.5
Фиг. 6
Фиг.7



| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с синхронным двигателем | 1972 |
|
SU553948A3 |
| Электропривод с асинхронной машиной с фазным ротором | 1976 |
|
SU675567A1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| Частотно-регулируемый синхронный электропривод | 1986 |
|
SU1319220A2 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| Электропривод с машиной переменного тока | 1976 |
|
SU675568A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |

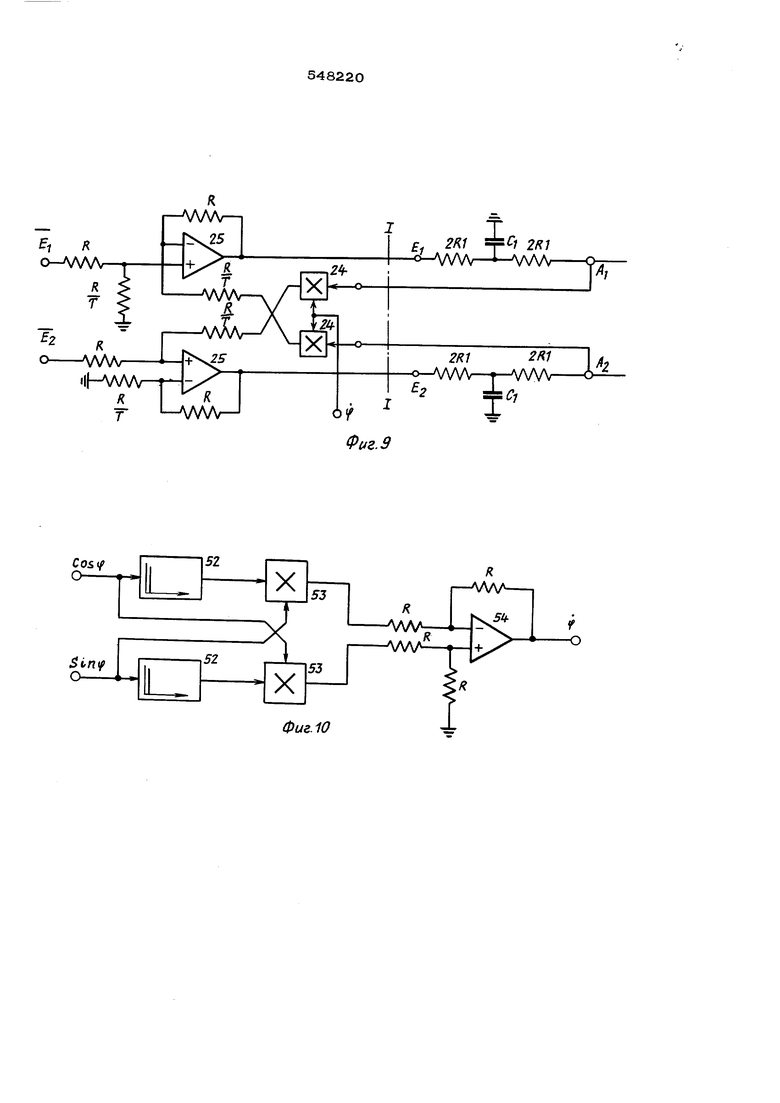


Фиг.в 1 R 0-АЛЛЛ/
Фиг. 10
R IТ , 2K1 2К1
V V /70 018
70 015 Ii Jr 11 mcosle-ffl i(M J::;-И Cos (f 2. 73 37 j3
