рычаг 13 рулевой трапеции 14 управляющих колес 15 и 16.
Рычаг 13 с помощью рычага 17 щарнирно соединен с рычагом 2 иараллелограммной подвески.
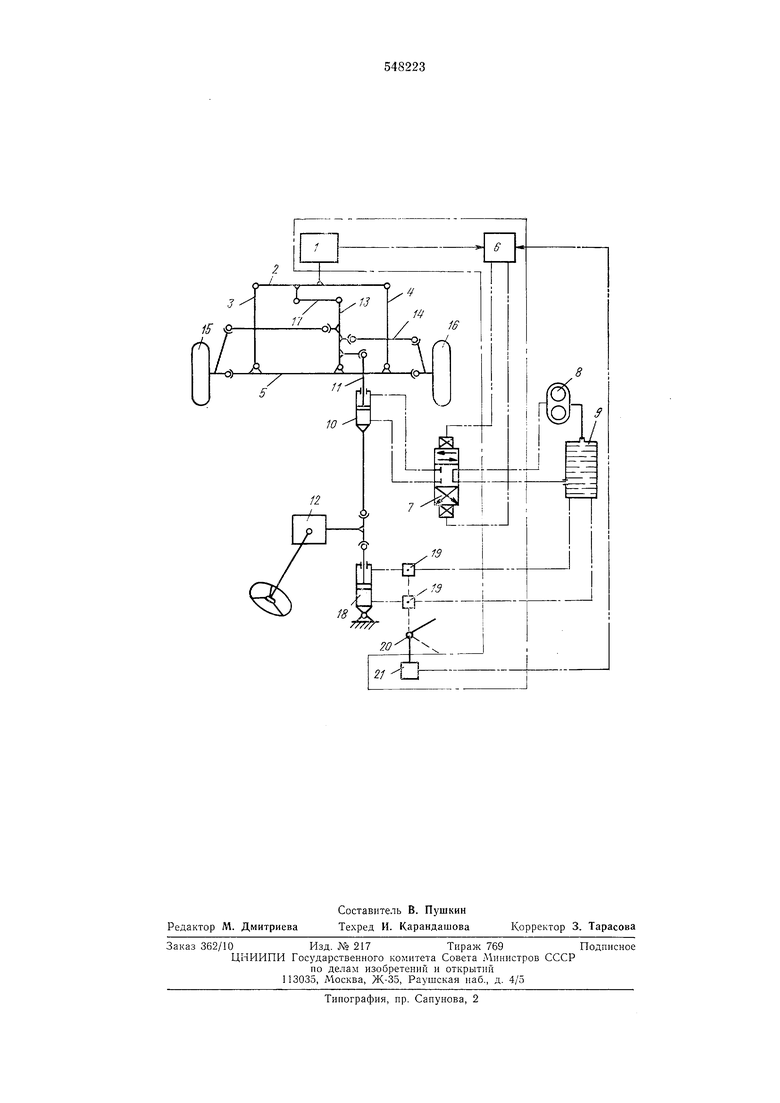
Кроме того, выходпой вал ручного привода рулевого управления 12 шарнирно соединен с штоком гидроцилипдра 18 {например, гидроусилителя ручного управления), гильза которого шарнирно связана с KOpnycoiM сельхозмашины. Полости гидроцилиндра 18 посредством переключателя режимов, выполненного в виде двухсекционного двухпозиционного клапана 19, соединены с маслобаком 9 гидросистемы. Гидроцилиндр 18 с клапаном 19 предназначены для перехода с ручного на автоматическое управление и наоборот. Клапан 19 соединен, например, с рукояткой 20 переключения, устаповленпой в кабине сельхозмашины. Эта рукоятка связана, например, с концевыми выключателями 21, соединенными с электронным блоком 6.
Устройство работает следующим образом.
В режиме автоматического копирования высокочастотный датчик 1 подвешен над опорной траекторией, выраженной, например, в виде рядка растений, борозды или гребня на почве.
Положение выходного вала ручного привода рулевого управлепня 12 зафиксировано гидроцилиндром 18, полости которого закрыты с помощью клапана 19, управляемого из кабины рукояткой 20. В этом случае концевыми выключателями 21 включен в работу от сигнала датчика 1 блок 6.
При отклонении оси датчика 1 от оси опорной траектории на его выходе возникает сигнал, величина н знак которого зависят от величины н знака этого отклонения. Этот сигнал после преобразования в блоке О включает один из электромагнитов электрогидравлического золотника 7, в соответствующую полость гидроцилнндра 10 поступает от гидронасоса 8 масло. Посредством тяги 11 и рычага 13 перемещающийся HITOK гидроцилиндра 10 поворачивает с помощью рулевой трапеции 14 управляющие колеса 15 и 16 и одновременно посредством рычагов 17 и 2 устанавливает датчнк 1 на ось опорной траектории. После этого поворот колес 15 и 16 прекращается до появления отклонения. Таким образом, с помощью рычагов 13, 17 и 2 осуществляется отрицательная обратная связь на вход датчика 1 по положению управляющих колес. Благодаря этому независимо от крутизны выходной характеристики датчика 1 угол новорота управляющих колес 15 и 16 пропорционален отклонению датчика 1 от оси опорной траектории.
При переходе на ручное управление клапаны 19 с помощью рукоятки 20 устанавливают так, что полости гидроцилиндра 18 соединяются с масляным баком 9 и этот гидроцилиндр не влияет на перемещение выходного вала ручного привода рулевого управления 12. Одновременно рукоятка 20 включает концевые выключатели 21, которые блокируют электронный блок 6 так, что электрогидрозолотник 7 занн.мает нейтральное положение. При этом полости гидроцнлиндра 10 заперты, а звено, содержащее тягу 11 и гидроцилиндр 10, представляет собой жееткий рычаг, соединяющий выходной вал ручного иривода рулевого управления 12 с рычагом 13 управления колесами 15 и 16.
Ьлагодаря тому что в существующую схему
управления сельхозагрегатом в тягу, соединяющую выходной вал ручного привода рулевого управления и рулевую трапецию, вставляется гидроцилиндр схемы автоматического управления, упрощается конструкция устройства, а стопорение гидроцилиндров с по.мощью клапанов упрощает нереход с ручного на автоматическое управление. Применение связанного с управляющими колесами механизма, выставляющего высокочастотный датчик на
ось опорной траектории, увеличивает точность конирования благодаря снижению влияния на эту точность нестабильностей крутизны выходной характеристики датчика, который в этом случае выполняет функцию нуль-органа.
Ф о р .м у л а и 3 о б р е т е п и я
1.Уетройство для управления самоходной сельскохозяйственной мащиной, включающее
датчик, гидрораспределитель, переключатель режимов, силовой гидроцнлиндр, ручной привод рулевого управлення и насос с масляным сакой, отличающееся тем, что, с целью повьинеппя надежности управления, оно снабжено электронной схе.мой управления и гидроцил ;ндр01 1, связанным гидравлически через переключатель режимов с масляным баком и кинематически - с валом ручиого привода рулевого управления и корпусом сельскохозяйственной машнны, а снловой гидроцилиндр так.ке книематическн связан с вало.м ручного привода ру; евого управления и датчиком.
2.Устройство по п. 1, отличающееся тем, что электронная схема включает электронный блок и концевые выключатели, причем датчик выполнен высокочастотным, дифференциальиого типа и подключен через электронный блок к гидрораспределителю и через концевые выключатели - к переключателю
режимов.
Источники информации, принятые во внимание при экспертизе:
1. Авт. св. Л 472625, кл. А 01В 69/04, 1973. 2. Авт. св. № 433836, кл. F 15В 9/00, 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоходная корнеклубнеуборочная машина | 1982 |
|
SU1090276A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ И ТЯЖЕЛОЕ ТРАНСПОРТНОЕ СРЕДСТВО КОЛЕСНОГО ТИПА С НЕЗАВИСИМОЙ ПОДВЕСКОЙ | 2014 |
|
RU2634738C2 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| Устройство управления самоходной сельскохозяйственной машиной | 1985 |
|
SU1287763A1 |
| Система автоматического вождения сельскохозяйственного агрегата по заданной траектории | 1991 |
|
SU1817958A1 |
| Электрогидравлическая система автоматического вождения сельскохозяйственной машины | 1987 |
|
SU1586548A1 |
| Объемный гидропривод рулевого управления транспортного средства | 1984 |
|
SU1180291A1 |
| Электрогидравлическое устройство рулевого управления транспортного средства | 1985 |
|
SU1337306A1 |