Фиг.1
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в системах автоматического вождения самоходных сельскохозяйственных машин и тракторов.
Цель изобретения - повышение устойчивости вождения, упрощение конструкции и снижение материалоемкости.
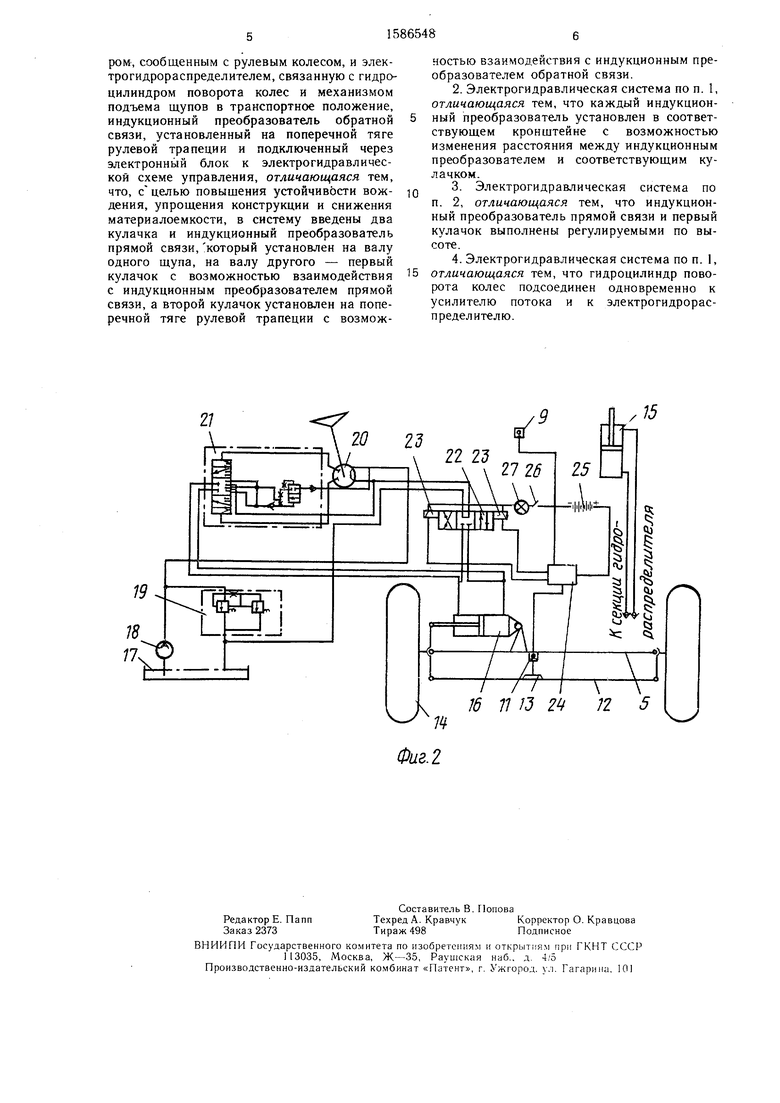
На фиг. 1 изображена принципиальная-схема чувствительного элемента системь автоматического вождения сельскохозяйственной машины по борозде; на фиг. 2 - электрогидравлическая схема системы.
Электрогидравлическая система автоматического вождения сельскохозяйственной машины состоит из левого 1 и правого 2 илупов с копирующими катками, установленными на радиальных продольных подвесках 3 шарнирно на раме 4, которая шарнирно установлена на переднем мосту 5 сельскохозяйственной машины. Щупы прижимаются к боковым поверхностям борозды пружинами 6.
Продольная радиальная подвеска 3 щупа 1 установлена жестко на валу 7, на другом конце которого жестко закреплен с возможностью регулирования высоть установки кулачок 8, взаимодействующий с индукционным преобразователем 9, закрепленным с возможностью регулирования высоты установки и расстояния от кулачка на валу 10 вместе с радиальной подвеской 3 щупа 2. На переднем мосту 5 сельскохозяйственной машины установлен индукционный преобразователь 11 обратной связи и на рулевой тяге 12 - кулачок 13, который взаимодействует с плунжером, индукционного преобразователя И обратной связи при повороте передних колес 14 сельскохозяйственной машины. Подъем рамы 4 со щупами из рабочего положения в транспортное и обратно осуществляется гидроцилиндром 15, а поворот передних колес 14 сельскохозяйственной машины - гидроцилиндром 16.
Электрогидравлическая схема системы автоматического вождения содержит масляный бак 17, гидронасос 18, предохранительно-перепускной клапан 19, насос-дозатор 20, усилитель 21 потока, маслопроводы, электрогидрораспределитель 22 с электромагнитами 23, подключенными проводами вместе с индукционными преобразователями 9 и 11 к электронному блоку 24. Питание осуществляется от аккумуляторной батареи 25 через выключатель 26 и контрольную лампочку 27.
Принцип работы электрогидравлической системы автоматического вождения сельскохозяйственной машины по борозде рассмотрим на примере установки ее на энергетический модуль при возделывании и уборке картофеля.
В транспортном положении щупов размыкается электрическая цепь выключателем
5
26. Поворот передних колес 14 технологического шасси (сельскохозяйственной машины) происходит при вращении рулевого колеса и подаче рабочей жидкости от насоса 18 через насос-дозатор 20 и усилитель 21 потока в гидроцилиндр 16 управляемых колес 14.
При опускании щупов электрическая цепь питания включается, а лампочка 27 зажигается. Если в процессе движения агрегат отклоняется, например, вправо от борозды, то копирующий каток щупа 1 будет опускаться, а каток щупа 2 подниматься. При этом кулачок 8 нажмет на плунжер индукционного преобразователя, электричес- кий сигнал поступит в электронный блок, а из него на один из электромагнитов 23 гидрораспределителя 22. Золотник гидрораспределителя 22 перемещается, а рабочая жидкость из бака 17 насосом 18 будет по- 0 даваться через насос-дозатор 20 и гидрораспределитель 22 в бесштоковую полость гидроцилиндра 16. Из штоковой полости этого гидроцилиндра рабочая жидкость будет поступать на слив в бак. Передние колеса технологического шасси повернутся влево, рулевая тяга 12 переместится вправо, а кулачок 13 нажмет на плунжер индукционного преобразователя обратной связи 11. В электронном блоке произойдет раическое суммирование сигнала прямой и обратной связи, а когда сигналы уравняются, золотник гидрораспределителя 22 возвратится в исходное нейтральное положение и поворот колес прекратится, а агрегат будет поворачиваться с постоянным радиусом поворота. При отклонении агрегата в противоположную сторону система отработает сигнал в обратной последовательности.
В системе автоматического вождения предусмотрена возможность изменения коэффициента пропорционально прямой связи в 40 зависимости от рабочей скорости агрегата. Подбор необходимой чувствительности осуществляется перемещением кулачка 8 и индукционного преобразователя 9 по высоте. Предусмотрена также регулировка рас- .. стояния от индукционных преобразователей 4-5
до кулачков.
Предусмотрена ручная коррекция в любой момент времени. Механизатор, вращая рулевое колесо при отключенной электрической цепи выключателем 26, направляет P-Q рабочую жидкость насосом-дозатором 20 через усилитель 21 потока в одну из полостей гидроцилиндра 16 управляемых колес 14.
Формула изобретения
55 1- Электрогидравлическая система автоматического вождения сельскохозяйственной машины, содержащая щупы с механизмами подвески и передачи сигналов, электрогидравлическую схему управления с насосом-дозатором, сообщенным с рулевым колесом, и элек- трогидрораспределителем, связанную с гидроцилиндром поворота колес и механизмом подъема щупов в транспортное положение, индукционный преобразователь обратной связи, установленный на поперечной тяге рулевой трапеции и подключенный через электронный блок к электрогидравлической схеме управления, отличающаяся тем, что, с целью повышения устойчивости вождения, упрощения конструкции и снижения материалоемкости, в систему введены два кулачка и индукционный преобразователь прямой связи, который установлен на валу одного щупа, на валу другого - первый кулачок с возможностью взаимодействия с индукционным преобразователем прямой связи, а второй кулачок установлен на поперечной тяге рулевой трапеции с возмож
ностью взаимодействия с индукционным преобразователем обратной связи.
2.Электрогидравлическая система по п. 1, отличающаяся тем, что каждый индукционный преобразователь установлен в соответствующем кронштейне с возможностью изменения расстояния между индукционным преобразователем и соответствующим кулачком.
3.Электрогидравлическая система по п. 2, отличающаяся тем, что индукционный преобразователь прямой связи и первый кулачок выполнены регулируемыми по высоте.
4.Электрогидравлическая система по п. I, отличающаяся тем, что гидроцилиндр поворота колес подсоединен одновременно к усилителю потока и к электрогидрорас- пределителю.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая система автоматического вождения сельскохозяйственной машины | 1987 |
|
SU1505454A1 |
| Система автоматического вождения сельскохозяйственной машины по борозде | 1985 |
|
SU1387888A1 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |
| Гидромеханическое устройство для автоматического вождения сельскохозяйственной машины по борозде | 1988 |
|
SU1604184A1 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1980 |
|
SU882440A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Устройство для автоматического направления движения самоходной сельскохозяйственной машины | 1980 |
|
SU948308A1 |
| Самоходная корнеклубнеуборочная машина | 1982 |
|
SU1090276A1 |
| Устройство для вождения сельскохозяйственного агрегата | 1985 |
|
SU1428214A1 |
| Устройство для автоматического вождения сельскохозяйственной машины по борозде | 1983 |
|
SU1230479A1 |
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в системах автоматического вождения самоходных сельскохозяйственных машин и тракторов. Цель изобретения - повышение устойчивости вождения, упрощение конструкции и снижение материалоемкости. Система содержит левый 1 и правый 2 щупы с копирующими катками. Щупы прижимаются пружинами 6 к боковым поверхностям борозды. Радиальная подвеска 3 щупа 1 установлена на валу 7, на другом конце которого кулачок 8 взаимодействует с индукционным преобразователем. При опускании щупов замыкается цепь питания и происходит поворот агрегата с постоянным радиусом поворота. Предусмотрена ручная коррекция, в системе автоматического вождения предусмотрена регулировка расстояния от индукционных преобразователей до кулачков. 1 ил.
2/
75
| Электрогидравлическая система автоматического вождения сельскохозяйственной машины | 1987 |
|
SU1505454A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
