Изобретение относится к сельскому хозяйству, в частности к системам направления тракторов по ориентирующим линиям.
Целью изобретения является повышение точности автоматического вождения.
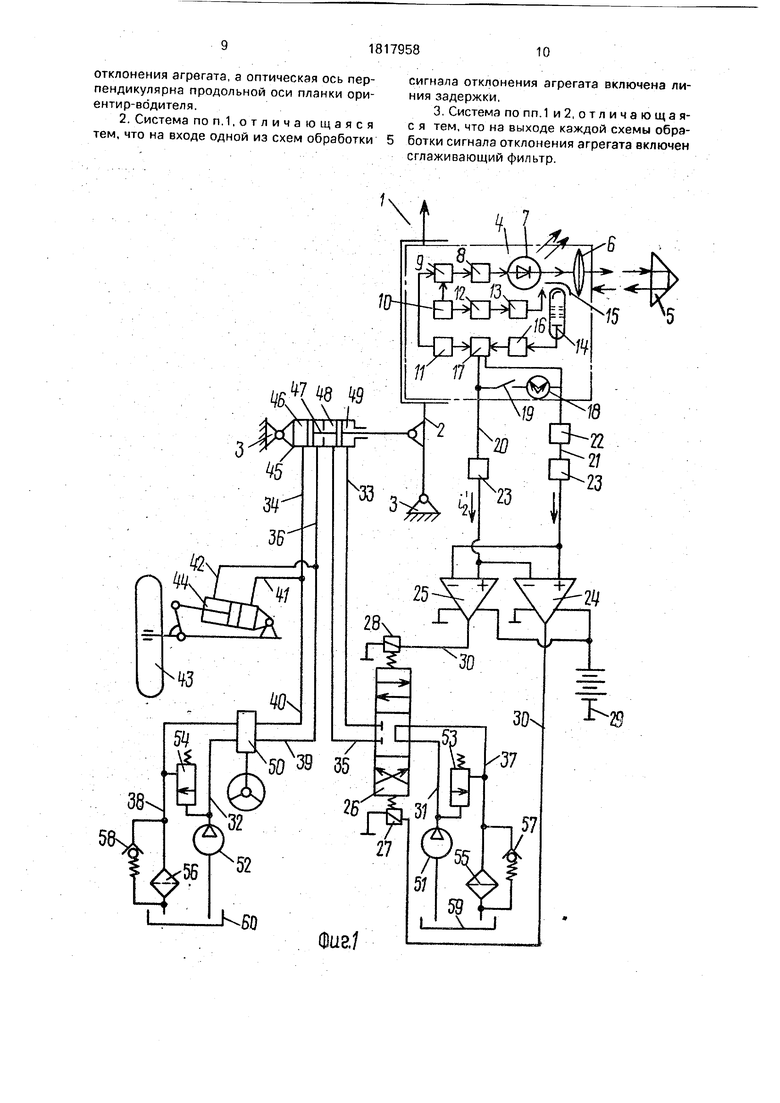
На фиг.1 изображена схема системы зв- товождения сельскохозяйственного агрегата по заданной траектории; на фиг.2 - графики сигнальных токов основного и вспомогательного контуров парафазного дальномера в зависимости от разности фаз измерительного и сигнального токов и дальности от ориентира.
Система автоматического вождения сельскохозяйственного агрегата содержит ориентир-водитель 1 в виде корпуса и планки 2, подвешенной на вертикальной оси к раме 3 arperafa в передней зоне обзора
механизатора и направленной по курсу движения. На планке 2 установлен корпус ориентир-водителя 1, в котором размещен электронный датчик 4 отклонения-приемо- nepeflat4Hk дальномера, например пара- фазного светодальномера типа КДГ-3, МСД-Ш и др. Дальномер находится в оптической связи с ориентиром - уголковым отражателем 5, расположенным на плантации, где осуществляется перемещение агрегата. В таком случае ось оптической системы 6 дальномера датчика 4 расположена перпендикулярно продольной оси планки 2.
Датчик 4 имеет генератор 10 масштабной частоты (150, 1549 МГц) и импульсный генератор 11 низкой частоты (80 Гц) манипуляции фазы масштабной частоты, выходы
00
ч ел
00
которых соединены с входом фазового манипулятора 9, изменяющего форму масштабной частоты на 180° с частотой импульсов генератора 11, Выход фазового манипулятора 9 через усилитель 8 соединен со еветодйодом 7, излучающим промрдули- рованный по интенсивности и по фазе световой поток через оптическую систему 6 в сторону уголкового отражателя 5.
Кроме того, датчик 4 имеет принимающий отраженный световой поток через ту же оптическую систему 6, фотоприемник 14 - фотоэлектронный умножитель с внешним электродом - диафрагмой 15, к которому электрически подсоединен выход генератора 10 масштабной частоты через фазовра- щатель 12 и усилитель 13, Анод фотоприемника 14 соединен электрически через усилитель 16 низкой частоты с синхронным детектором 17, вход которого соединен с выходом импульсного генератора 11. На выходе синхронного детектора 17 установлен стрелочный нуль-индикатор 1.8 с размыкающим контактом (выключателем)
19....: ... . . :.
К нуль-индикатору 18 подключены схемы 20 и 21 обработки сигналов выходных токов И и 2 основного и вспомогательного контуров модулятор-демодулятор: 10, 9, 8, 7-10,12, 13, 15, 14, 16, 17 и 11; 10, 9, 8, 7-10, 12,13, .15, 14, 16, 11, 17 соответственно. Каждая из схем 20 и 21 является схемой обработки сигнала соответственно правого и левого отклонений агрегата и имеет по фильтру 23 нижних частот, а одна из них - линию 22 задержки на половину периода частоты импульсного генератора.11. Выход схемы 20 обработки сигнала правого отклонения агрегата соединен с инвертирующим входом компаратора 24 сигнала направления агрегата вправо и с неинвертирующим входом компаратора 25 сигнала направления агрегата влево. Выход схемы 21 обработки сигнала левого отклонения агрегата соединен с инвертирующим входом компаратора 25 сигнала направления агрегата влево и с неинвертирующим входом компаратора 24 сигнала направления агрегата вправо/ .. ;
Компараторы 24 и 25 построены, например, на операционных усилителях А2030, выходные параметры которых по напряжению и току согласуются с электрическими параметрами электрогидрораспределителя 26, например, типа ЗСУ-8 с катушками электромагнитов 27 и 28 его включения. Выход компаратора 24 соединен с катушкой электромагнита 27, а выход компаратора 25 - с катушкой электромагнита 28. Схемы 20 и 21 обработки сигналов левого и правого отклонений агрегата, компараторы 24 и 25. электромагниты 27 и 28, а также соединительные провода 30 образуют каналы сигналов соответственно правого и левого направ.ле- ний агрегата. Электросхема запитана от аккумулятора 29 агрегата.
Планка 2 ориентир-водителя 1 соединена кинематически со штоком поршневого мотор-насоса 45. На штоке тандемом уста0 новлены два поршня, образующие в цилиндре мотор-насоса 45 с перегородкой между ними четыре полости 46-49. Полости 48 и 49 сообщены маслопроводами 33 и 35 с управляющими каналами электрогидрораспреде5 лителя 26 и являются переменными полостями гидромотора. Полости 46 и 47 являются переменными полостями насоса и сообщены маслопроводами 34, 41 и 36, 42 с поршневой и штоковой полостями гидроци0 линдра 44 исполнительного механизма направления агрегата, выполненного, например, в виде управляемого колеса 43. Объем каждой из полостей мотор-насоса 45 в несколько раз меньше объема полостей
5 гидроцилиндра 44. С гидроцилиндром 44 маслопроводами 39 и 40 сообщен и узел 50 дистанционного корректирования статизма вождения и рулевого управления. Узел 50 дистанционного корректирования статизма
0 вождения и рулевого управления сообщен с баком 60 через напорный маслопровод 32 и насос 52, а также по сливному маслопроводу 38 и через фильтр 56 или перепускной клапан 58. Напорный и сливной соответст5 венно маслопроводы 32 и 38 соединены через предохранительный клапан 54.
Электрогидрораспределитель 26 сообщен с баком 59 через напорный маслопровод 31 и насос 51, а также по сливному
0 маслопроводу 37 и через фильтр 55 или перепускной клапан 57. Напорный и сливной маслопроводы 31 и 37 соответственно соединены через предохранительный клапан 53,.
5 Ориентиры-уголковые отражатели 5 размещены на плантации, например, сахарной свеклы в двух пунктах, расстояние между которыми равно половине ширины захвата агрегата и так, что величины углов
0 оптических секторов приемоизлучения составляют 180°, но направлены противоположно друг другу.
Механизатор при ручном вождении устанавливает (например, посевной) агрегат в
5 исходное положение и включает контактом 19 стрелочный нуль-индикатор 18. При этом высокочастотный генератор 10 масштабной частоты и низкочастотный импульсный генератор 11 подают свои напряжения в фазо- вый манипулятор 9, в котором фаза
масштабнрй частоты скачком изменяется на 180°с частотой следования импульсов генератора 11 и после усиления в усилителе 8 подается на светодиод 7, излучающий поэтому промодулированный пЬ интенсивно- сти и фазе световой поток через оптическую систему 6 в сторону уголкового отражателя 5. Отраженный луч оптическая система 6 направляет на катод фотоэлектронного умножителя - фотоприемник 14, который де- модулирует световой поток, т.к. к его внешнему электроду 15 приложено измерительное напряжение, поступакщее через усилитель 13 и фазовращатель 12 от генератора 10 масштабной частоты. В результате взаимодействия фототока, образованного отраженным лучом с модулирующим напряжением, поданным на электрод 15, в анодной цепи фотоэлектронного умножителя Фотоприемника 14 возникают сигнальные токи И и |2, чередующиеся с частотой импульсного генератора 1.1. После усиления в усилителе 1(5 они подаются на синхронный детектор 17, на который подается и напряжение с импульсного генератора 11. Под действием сигналов импульсного генератора 11 в детекторе 17 происходит синхронно с работой фазового манипулятора 9 изменение направления тока, протекающего через нуль-индикатор 18. Из-за инерционности нуль-индикатора 1.8 его показания равны разности противоположно направленных чередующих токов h и J2. Известно,что
.... - :. -. . : 11 А + Bcos{ р +а) и 2 А - Bcos (р pi +a),
где А - коэффициент, зависящий от напряжения питания;
В - коэффициент, зависящий от прозрачности атмосферы;
р -фаза модуляции светового пото- ка на выходе из светодиода 7;
(pi -фаза модуляции светового пото- ка на входе в фотоприемник 14 после пробега до уголкового отражателя 5 и обратно зависит от величины пробега;
а - разница фаз между р и фазой измерительного напряжения (массштабной частоты), приложенного к. внешнему электроду 15, т.е. разность фаз работы модулятора и демодулятора, которую механизатор подрегулировал рукояткой фазовращателя 12.. : .
Откуда d г при (f - р2 + а 90° (или 270°).
Поэтому в исходном положении агрегата механизатор вращением рукоятки фазовращателя 12 изменяет параметру до совмещения стрелки нуль-индикатора 18с нулем. Этим он уравнивает по модулю токи It и 2за счет различия их фаз на 90°, когда движение стрелки к нулю совпадает с направлением вращения ручки фазовращателя 12 (при встречном движении рукоятки и стрелки - 270°).
После этого механизатор размыкает контакт 19 и включает рабочую скорость движения агрегата. При отклонении агрегата влево (вправо) от дуги окружности с центром в оптическом центре уголкового отражателя 5 радиус движения агрегата и оптического центра дальномера -датчика 4, а также фаза pi увеличивается (ум°еньша- ется). Поэтому аргумент косинуса ( ( + а) становится меньше (больше) 90° и пульсирующий в схеме 21 обработки сигнала левого отклонения агрегата ток Н будет больше (меньше) тока 12, пульсирующего в схеме 20 обработки сигнала правого отклонения агрегата на величину ii , (i2 ), показанную на графике (фиг.2). Поэтому по- сле совмещения пульсаций токов И и i2 во времени линией 22 задержки и сглаживания фильтрами 23 нижних частот, их потенциалы на неинвертирующем входе компаратора 24 сигнала направления агрегата вправо и на инвертирующем входе компаратора 25 сигнала направления агрегата влево будут больше (меньше), чем на неинвертирующем входе компаратора 25 и инвертирующем входе компаратора 24. В результате на выходе компаратора 24 (25) появляется напряжение, близкое к напряжению аккумуляторной батареи 29, и ток, определяемый сопротивлением катушки электромагнита 27 (28) электрогидрораспределителя 26, а на выходе компаратора 25 (24) они равны нулю. Электромагнит 27 (28) смещает плунжер электрогидрораспределителя 26 на подачу масла от насоса 51. через маслопровод-33 (35) в полость 48 (49) поршневого мотор-насоса 45. В результате шток мотор-насоса 45 смещается и поворачивает планку 2 ориентир-водителя 1 вместе с оптическим центром датчика 4 вправо (влево) до восстановления начального значения фазы р% , и равенстватоковН и (2. При этом электрические потенциалы на входах компараторов 24,25 уравниваются, напряжение и ток на выходах компараторов 24, 25 исчезают и плунжер электрогидрораспределителя 26 устанавливается пружинами в нейтральное положение, запирая маслопроводы 33 и 35. Так осуществляется прямая и обратная связи в системе.
Одновременно с изменением объемов полостей 48 и 49 мотор-насоса 45 изменяются и объемы полостей 46 и 47. При отклонении ориентир - водителя 1 вправо (влево) и увеличении объема полости 48(49) уменьшэ- ется объем полости 47 (46). Масло из полости 47 (46) по маслопроводам 36 и 42 (34 и 41) вытесняется в штоковую (поршневую) полость гидроцилиндра 44, втягивая (вытал - кивая) его шток, который поворачивает уп- равляемое колесо 43 вправо (влево) пропорционально отклонению ориентир- водителя 1 и задает тем самым соответствующее направление перемещения сельскохозяйственного агрегата.
При вращении рулевого колеса узла 50 дистанционного корректирования статизма вождения и ручного управления, например, вправо (влево) порция масла, пропорциональная углу поворота рулевого колеса, по- ступает от насоса 52 по маслопроводам 32, 39, 42 (32, 40, 41) в штоковую (поршневую) полость гидроцилиндрв 44 и суммируется с порцией масла от мотор-насоса 45. Но каждая из полостей мотор-насоса 45 в несколь- ко раз меньше соответствующих полостей гидроцилиндра 44, т.к. при автовождении колебания колеса 43 от заданного направления невелико (1-3°), а полное отклонение при ручном вождении до 40°. Поэтому меха- низатор без дополнительных манипуляций простым вращением рулевого колеса может при необходимости направить агрегат по нужному направлению и без отключения системы автовождения.
При междурядных обработках механизатор устанавливает культиваторный агрегат в исходное положение, как и на посеве, а затем на самой малой скорости и при ручном вождении осторожно заводит рабочие органы культиватора в междурядья симметрично относительно рядков и останавливает агрегат. Затем замыкает контакт 19, выставляет стрелку нуль-индикатора 18 на нуль, размыкет контакт 19 и включает рабочую скорость. Агрегат движется в автоматическом режиме, как и при посеве, воспроизведя ту же траекторию. При обнаружении статического смещения от рядков при любой причине механизатор чуть доворачива- ет руль в необходимом направлении, подавая соответствующую порцию масла в гидроцилиндр 44 и доворачивая колесо 43 до устранения статизма. При дальнейшем автоматическом вождении система откло- няет колесо 43 в ту или иную сторону от его нового исходного положения.
Точное направление пропашного культиватора на плантации сахарной свеклы позволяет уменьшить ширину защитной зоны со180-200 мм до 80-40 мм и количество сорняков в 2-5 раз. По данным Всесоюзного научно-исследовательского института сахарной свеклы (ВНИС) средняя засоренность плантаций сахарной свеклы (115 шт. сорняков на 1 м2) приводит к потере урожая на 12,4 т/га. Поэтому уменьшение количества сорняков в 3,5 раза за счет соответствующего уменьшения защитной зоны увеличивает урожай на 10,5 т/га. Фор мула изобретения 1. Система автоматического вождения сельскохозяйственного агрегата по заданной траектории, содержащая переключающий электрогидрораспределитель, гидроцилиндр исполнительного механизма направления движения агрегата, гидравлически сообщенный с узлом дистанционного корректирования статизма и ручного управления, ориентир-водитель с датчиком отклонения и блок связи датчика отклонения с переключающим электрогидрораспредели- телем, отличающаяся тем, что, с целью повышения точности автоматического вождения, она снабжена дозирующим поршневым мотор-насосом, правая и левая полости которого гидравлически связаны соответственно с линиями переключающего электро- гидрораспределителя и полостями гидроцилиндра исполнительного механизма направления движения агрегата, при этом ориентир-водитель выполнен в виде корпуса, в котором размещен датчик отклонения и планки, один конец которой жестко соединен с корпусом, средняя часть кинематически связана со штоком дозирующего поршневого мотор-насоса, а на противоположном конце установлен шарнир для закрепления планки на раме агрегата, причем блок связи датчика отклонения с переключающим электрогидрораспределителем включает компараторы сигналов левого и правого направления движения агрегата и схемы обработки сигнала правого и левого отклонения агрегата, выход каждой из которых соединен с инвертирующим входом компаратора сигнала одноименного направления движения агрегата и с неинвертирующим входом компаратора сигнала противоположного направления движения агрегата, а выход каждого компаратора подключен к катушке электомагнита включения электрогидрораспределителя на подачу масла для одноименного направления движения агрегата, при этом датчик отклонения выполнен в виде приемопередтчика дальномера, выходы которого связаны с входами схем обработки сигнала левого и правого
отклонения агрегата, а оптическая ось пер-сигнала отклонения агрегата включена липендикулярна продольной оси планки ори-ния задержки.
ентир-во дителя.3. Система по пп.1 и 2, от л и ча ю ща я2. Система по п. 1,отличающаясяся тем, что на выходе каждой схемы обратем, что на входе одной из схем обработки5 ботки сигнала отклонения агрегата включен
-сглаживающий фильтр.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| Система направления машины по контрастному следу | 1989 |
|
SU1789091A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| Электрогидравлическая система автоматического вождения сельскохозяйственной машины | 1987 |
|
SU1586548A1 |
| Способ группового вождения сельскохозяйственных агрегатов | 1981 |
|
SU1103814A1 |
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
| Устройство для автоматического вождения колесного трактора | 1984 |
|
SU1210685A1 |
| СПОСОБ ПОВОРОТА ДВИЖИТЕЛЯМИ И УСТРОЙСТВО РУЛЕВОЕ ТРАКТОРА | 2010 |
|
RU2430851C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| СПОСОБ АВТОВОЖДЕНИЯ СЕЛЬХОЗАГРЕГАТА | 1991 |
|
RU2025924C1 |
Использование: в сельскохозяйственном машиностроении. Система содержит в передней части агрегата ориентир-водитель, выполненный в виде планки, закрепленной на вертикальной оси с электронным датчиком отклонения, чувствительным эле2 ментом которого является приемопередатчик дальномера, направленный перпендикулярно продольно оси стрелки и соединенный через схемы обработки сигнала правого и левого отклонений с инвертирующими и неинвертирующими входами пары компараторов, выходы которых соединены с электромагнитами переключающего злектрогидрораспределителя, сообщенного гидравлически с гидроцилиндром поворота управляемых колес агрегата через полости поршневого мотор-насоса, шток которого соединен кинематически с приемопередатчиком дальномера через планку ориентир- водителя, что обеспечивает вождение с.х. агрегата по равносигнальным линиям электромагнитного поля и повышение точности автоматического вождения. 2 з.п. ф-лы, 2 ил.
«Ч 8 ..«9
Фаг/
/
.
10--4
L
9
««.
ь
29
57
51
| Устройство для автоматического вождения самоходной машины по контрасному следу | 1974 |
|
SU511892A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
