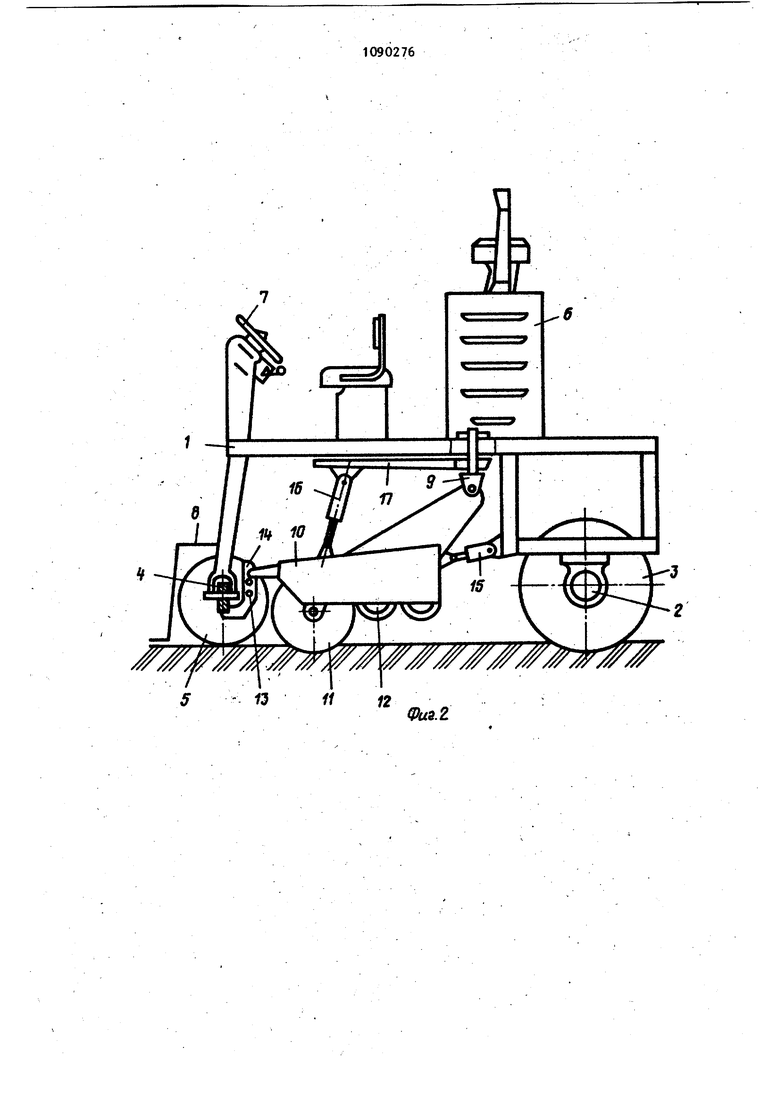
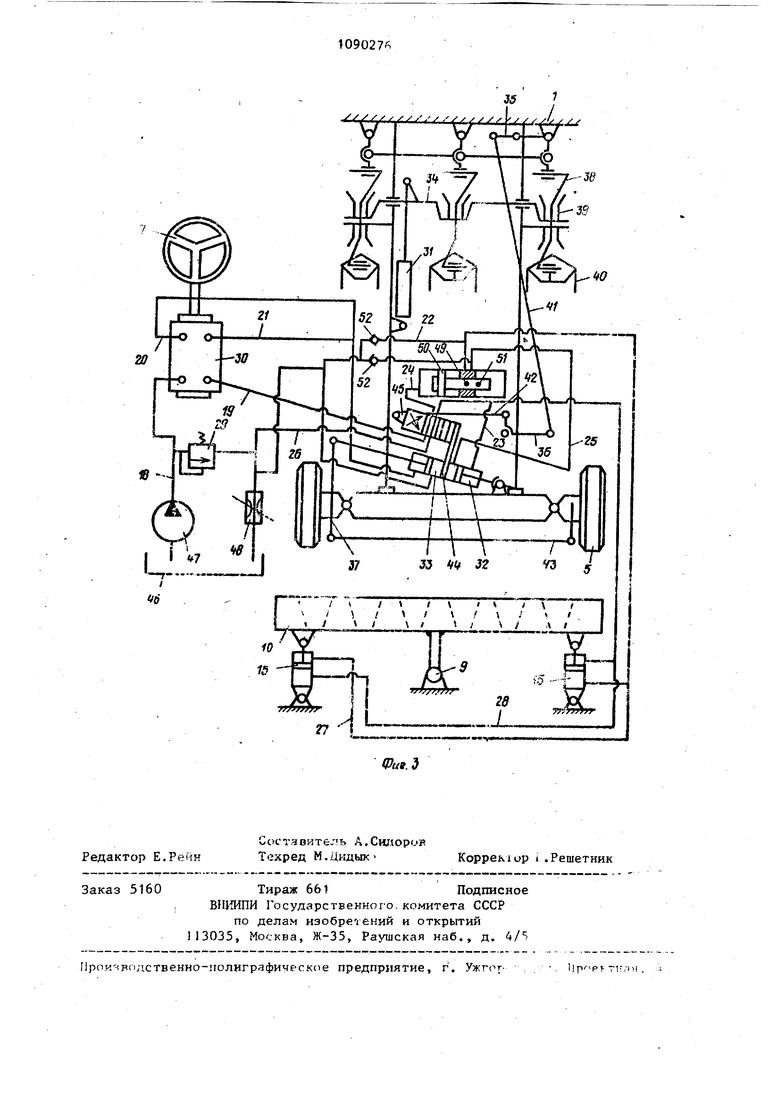
t1 Изобретение относится к отрасли сельскохозяйственного машиностроения а именно, к машинам для уборки корней сахарной свеклы. Цель изобретения является улучшение качества выполнения технологичес кого процесса путем расширения функциональных возможностей устройства На фиг.1 схематично изображена корнеклубнеуборочная машина с поворотными рабочими органами; на фиг.2 общий вид машины, вид сбоку; на фиг.З - гидравлическая схема управле ния машиной. V Корнеуборочная машина содержит Jkeсущую раму 1, которая охшрается на задний мост 2 с колесами 3 и управляемый мост 4 с колесами 5. На несущей раме 1 установлены силовой агрегат б, рулевое колесо управления 7/ гидромеханическая система автоматического управления 8, К раме 1 с помощью шарнира 9, позволяющего поворот рабочих органов в вертикальной и горизонтальной плоскостях, крепится навесная управляемая рамка 10, на которой установлен рабочие органы 11 и транспортеры 12.Передней частью ра мка 10 в рабочем положении опирае гся на шарниры 13, которые вставлены в отверстия стоек 14. Поворот рамки tO с органами 11 в горизонтальной плоскости относительно оси осуществляется гидроципи1здрами 15. В транспортное положение рама 10 переводится с помощью гидроцшгандра 16, который крепится на балке 17, связанной шарнирно с несущей рамой. 1. Гидромеханическая система aBtoMaтическЬго управления состоит из трубопроводов 18-28 предохранительного клапана 29, насоса-дозатора 30, гидроцилиндров 15,317-33, вала подъема 34, рычагов 35-37, параллелограмма ,38, вилки-ловителя 39, датчиков в виде щупов 40, тяг 41-43, кронштейна золотника 44, золотиика 45, резервуара масляного бака 46, гидронасоса 47 дросселя 48, делителя 49 с поршнем 50 и ппунжером 51 и обратных клапанов 52. Работа корнеклубнеуборочной машины осуществляется следующим образом. Перевод гидромеханической системы, управления 8 в рабочее положение осуществляется одновременно с опусканием рабочих органов обшзим рычагом управления из кабины машины. При зтом гид6роцилиндр 31, подключенный к гидросистеме машины параллельно с гидрощшиндром 16 подъема рабочих органов 11, поворачивает вал 34, опускаюощй вниз вилки-ловителя 39, которые освобождают нижние штанги параллелограмма 38. Датчики в виде щупов 40 опускаются в междурядья и одновременно рычаги вилок-ловителей 39 натягивают присоединенные к ним пружины, которые прижимают датчики в виде щупов 40 рамки 10 к поверхности почвы. Передний мост 4 и рамки 10 с рабочими органами управляются гидравлическими цилиндрами 15. От гидромеханической системы управления В сигнал об изменении направления движения поступает в делитель 49, которьй распределяет поток к гидроцилиндру упраляёмых колес и к гидроцилиндрам 15 управления рамки 10с рабочими огранами. Поворот управляемой рамки 10 с рабочими органами должен осуществляться до тех пор, пока не совпадает мгновенный , центр поворота управляемых колес и ведущего моста с моментом центра поворота ведущего моста и рабочих органов.. В рабочем положении масло от гидронасоса 47 через насос-дозатор 30 и трубопроводы 18 и 19 подводится к золотнику 45 ( и нейтральном положении золотника 45 по трубопроводу 26 поступает на слив в бак 46. Если в процессе движения машина отклоняется, например, вправо от траектории рядков, щупы 40 под действием рядков повернутся влево и через передаточный механизм(рычаги 35, и 36 и тяги 41 . и 42у сместят плунжер золотника 45. влево от нейтрали, тогда масло от золотника из трубопровода 24 поступа ет в левую .часть делителя 49. Под действием давления масла, поршень делителя 49 будет перемещаться вправо. Из правой части делителя масло по трубопроводу 25 перекачиваемся в левую полость гидроцилиндра 32 управления, а по трубопроводу 27 масло перекачивается в гидроцилиндры 15.. Таким образом происходит смещение корпуса гидроцилиндра 32 управления влево, которое через силовой гидроцилиндр 33 и систему рычагов 37 и Тягу 43 передается на управляемые колеса 5, поворачивая их также влево, и перемещение гидроцнлиндров 15, которые поворачивают рамку 10 с рабочими органами 11 тоже влево. Одновременно с поворотом управляемых колес через кронштейн золотника 14, жестко связанного с корпусом гидроцилиндра 32 управления смещается корпус золотник в том же направлении, в котором ране переместился плунжер. Золотник возвращается в нейтральное положение, и поворот управляемых колес и рамки прекращается. При отклонении, например, влево о рядов автомат вождения обеспечивает поворот урпавляемых колес 5 и рамки 10 в противоположную сторону направления траектории отслеживаемых рядков. .Таким образом, обеспечивается автоматическое управление машины вдоль гона. Пропорциональность угла поворота управляемых колес 5 углу поворота рамки 10 с рабочими органами обеспечит отношение площади поршня 50, делителя 49 площади плунжера 51 делите ля 49 и отношение площадей гидроцилинд ра 32 управления и гидроцилиндров 15. Пропорциональность угла поворота управляемых колес углу отклонение датчиков обеспечивается передаточным отношением, образуемых прямой и обиротной связью. Коэффициент пропорцис нальности определяемся отношением плеч рычагов 35 и 36 прямой связи и рычагор, 37 обратной связи /осуществляемой через рычар 37,силовойгидроцилнидр 33 ,и кронштейн золотника 44/. Тля компенсации утечек в системе предусмотрены обратные клапаны 52 и дроссель +8. ilpH необходимости корректироикн движения машины водитель вращает рулевое колесо управления 7, вбздействует на насос-дозатор 30,который через трубопровод 20 и 21 смещает влево или вправо шток силового гидроцилиндра 33. Тогда на соответствующи угол в сторону рассогласования движе ния повернутся управляемые колеса 5 и машина возвратится в междурядья. Формула изоб1$етения Самоходная корнеклубнеуборочная машина, содержащая установленные на несущей раме рамку с рабочими органами, гидромеханическую следящую систему автоматического управления с копирующими щупами, кинематически связанными с гидрораспределителем следящей системы, соединешилми силовым гидроцилиндром управления колесами, а также гидравлический источник питания с трубопроводами, при этом рамка с oaGcTiit органами имеет гидроцилинмР / давления и шарнирно соединена с ::«-. рамой, а гидравлическая часть гидромеханической следящей системы снабжена делителем потока, который расположен между гидроцилиндрами управления колесами и рамки с рабочими органами и гидрораспределителем следящей системы, о тличающаяся тем, что, с целью улучпгения качества вьшолнения технологического процесса, путем расшире-{ ния функциональных возможностей устройства, машина снабжена узлом дистанционного ручного управления, гидравлически связанным с гидроцшшндром управления колесами, и имеет механиз мы подъема и опускания рабочих органов и датчиков гидромеханической системы автоматического управления в транспортное и рабочее положение, вывыполненные в виде подключенных параллельно к гидросистеме машины гидроцилиндров, корпус гидрораспределителя следящей системы посредством кронштейна жестко связан с корпусом гидроцилиндра управления колесами,а делитель потока выполнен в виде расположенных в корпусе поршня с плунжером, соотношение площадей которых пропорционально взаимосвязи угла поtsopoTa рамки с рабочими органами.
ui.1
мцп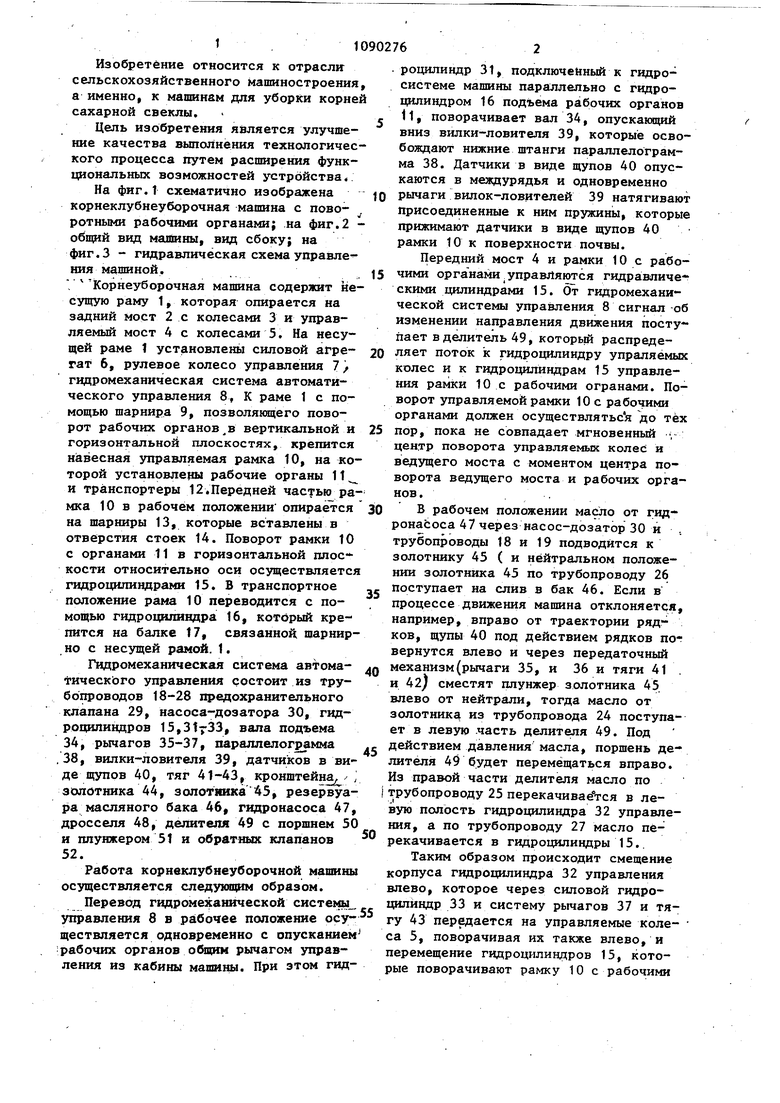

| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| Устройство для автоматического направления движения самоходной сельскохозяйственной машины | 1980 |
|
SU948308A1 |
| Самоходная сельскохозяйственная машина | 1987 |
|
SU1440376A1 |
| Сельскохозяйственный агрегат | 1982 |
|
SU1085536A1 |
| Устройство для управления самоходной уборочной машиной | 1979 |
|
SU879060A1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| КОПИРУЮЩЕЕ УСТРОЙСТВО АВТОМАТА ВОЖДЕНИЯ КОРНЕПЛОДОУБОРОЧНОЙ МАШИНЫ | 2004 |
|
RU2270551C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2014 |
|
RU2586917C1 |
| Устройство управления самоходной сельскохозяйственной машиной | 1990 |
|
SU1752215A1 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |

Изобретет е относится к отрасли сельскохозяйственного машиностроения , а именно к машинам для уборки корней сахарной свеклы. Цель изобретения - улучшение качества выполнения технологического процесса путам расширения функциональных возможностей устройства. На несущей раме, опираю-, щейся на задний мост и управляемый мост с колесами 5 установлен силовой агрегат 6, рулевое колесо управления 7 и гидромеханичкая система 8 автоматического управления. К с помощью шарнира 9, обеспечивающего поворот рабочих органов в вертикальной н горизонтальной плоскостях, крепится навесная управляемая рамка 10, н торой установлены рабочие органы и транслортерыТПередней частью рамка Ю р рабочем положении опирается на шарниры, которые размещены в отверс- тиях отсека.Поворот рамки 10 с рабочими органами в горизонтальной плос- . кости относительно вертикальной оси осуществляется гидроцилиндрами. 15. В транспортное положение рамка 10 переводится с помощью гидррцилйндра 16, который крепится на балке, шарнирно связанной с несущей рамой. Гидромеханическая системна автоматического уп равления состоит из трубопроводов 18-28, предохранительного клапана 29, наноса-дозатора 30, гидро1щлиндров 15,31,32 и 33, вала подъема 34, рычагов 35,36 ri 37, параллелограмма 38,, вилки-ловителя 39 датчиков в виде шупов 40, тяг 41, 42 и 43, кроншетейна золотника 44, золотника 45, масляного сл бака 46, гидронасоса 47, дросселя 48, делителя 49 с поршнем 50, плунжером 51 и обратных клапанов 52. При отклонении от рядков убираемой культуры автомат вождения обеспечивает поворот управляемых колес 5 и рамки 10 в противоположную сторону направления QD О ND траектории отслеживаемых рядков. Пропорциональность угла поворота управляемых колес 5 углу поворота рамки 10 с рабочими органами обеспечивает Од отношение площади поршня 50 делителя 49 к площади плунжера 51 и отношение площадей гидроцилиндра 32 управления и гидроцилиндров 15. 3 ил.
У
.t) w. .-41-ir-. -..., iinii i in
/ I t Л I
i / / / / .« .
, I I I I V /Л
fo
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИНЫ В ГРУНТЕ | 0 |
|
SU386093A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
