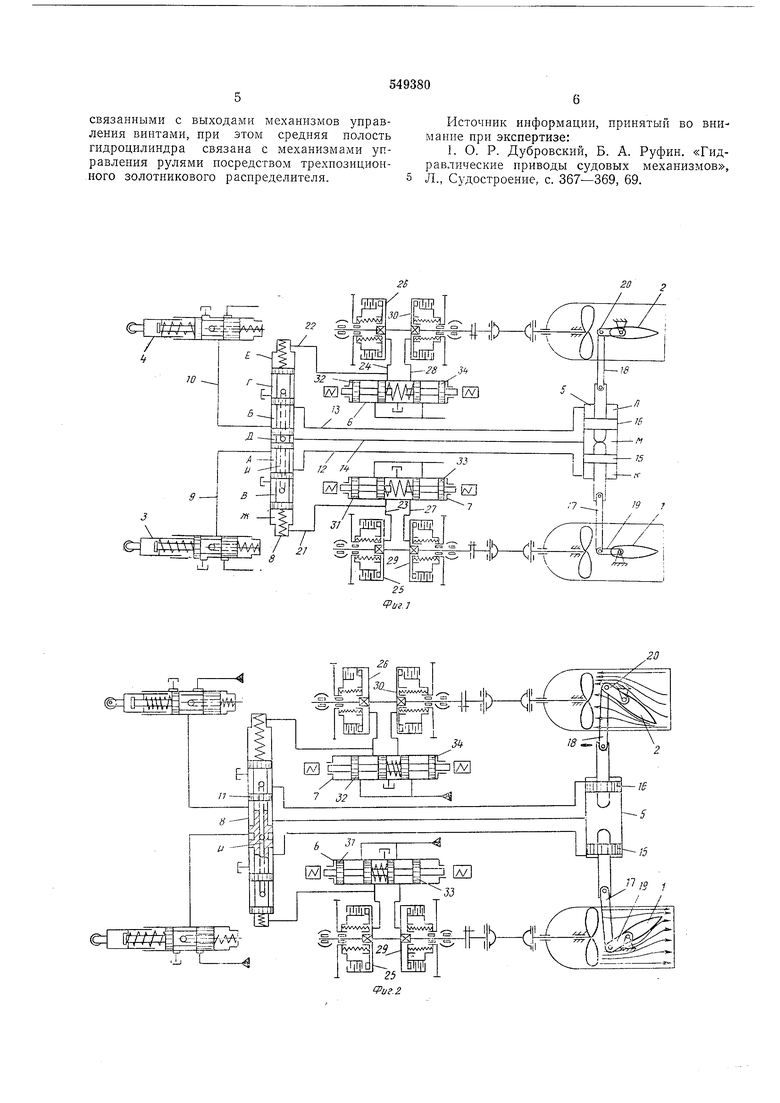
(54) ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПЛАВАЮЩИМ СРЕДСТВОМ водятся от электромагнитов, а возвращаются в исходное положение пружиной, установленной между плунжерами каждого из механизмов 6, 7 управления винтами. Гидравлическая система управления плавающим средством работает следующим образом. В исходном положении (см. фиг. 1) полости К, Л гидроцилиндра 5 через трубопроводы 12, 13 полости А, Б распределителя 8, трубопроводы 9, 10 и механизмы 5, 4 сообщены со сливом. Средняя полость М гидроцилиндра 5 также сообщена со сливом через трубопровод 14, полость Д, канал И, полости В, Г распределителя 8. Бустеры муфт 25, 26 через магистрали 23, 24, а также полости Е, Ж распределителя 8 через трубопроводы 21, 22 сообидены со сливом через механизмы 6, 7 управления винтами. Бустеры муфт 29, 30 сообщены со сливом через магистрали 27, 28 и механизмы 6, 7. Для осуществления крутого поворота плапающего средства вправо (см. фиг. 2) посредством механнзма 6 включается передний ход левого виита, а посредством механизма 7 включается задний ход правого винта, а также приводится в действие от органа управления механизм 4 управления рулями. При включении задиего хода правого винта плунжер 32 перемещается до упора в нлунжер 34 и открывает доступ рабочей жидкости в магистраль 24, по которой она подводится.в бустер муфты 26 и одновременно в полость Ж распределителя 8 по трубопроводу 22. Под действием подводимого давления включается муфта 26, а нлунжер // распределителя 8 перемещается в левое крайнее положение. При включении переднего хода левого винта плунжер 33 механизма 6 перемещается до упора в плунжер 31 и открывает доступ рабочей жидкости в магистраль 27, по которой она подводится в бустер муфты 29. Правый механизм 4 включает подачу рабочей жидкости по трубопроводу 10, полости Б распределителя 8, трубопроводу М в полость М гидроцилиндра 5. Под действием давления поршни 15 и 16 расходятся, осуществляя тягами 17, 18, рычагами 19, 20 новорот рулей 1, 2 к диаметральной плоскости пладающего средства. Полости Л, К гидроцилиндра 5 в этот момент сообщены со сливом трубопроводами 12, 13 и распределителем 5. тт Для осуществления крутого поворота влево посредством механизма 6 включается задний ход левого винта, а посредством механизма 7 - передний ход правого винта, а также приводится в действие от органт управления мех.тризм 5. Плунжер // распределителя 8 под действием давления, постл/пающего в полость Ж от магистрали 23 через трубопровод 21, перемещается в крайнее правое положение и открывает подвод рабочей жидкости от левого механизма / в полость гидроцилиндра 5 через труоопровод 14. ули поворачиваются, как и в предыдущем лучае, к диаметральной нлоскости плавсред тва. Для поворота плавсредства с большим раиусом обычно используются одни рули. При движении плавсредства вперед поредством механизмов 6, 7 включен передний од винтов. Плунжер // золотникового распределитея 8 находнтся в исходном положении, так ак полости Е и Ж управляющего давления ообщены со сливом трубопроводами 21, 22, магистралями 23, 24 и механизмами 6, 7. Для поворота вправо включается правый механизм 4. Рабочая жидкость от механизма по трубопроводу 10, полости Б распределителя, трубопроводу 13 поступает в полость Л гидроцилипдра 5. Под действием подводимого давлеиия иоршни 15, 16 перемещаются в левую сторону, осуществляя одновременный поворот рулей вправо. Полости /С Л1 гидроцилиндра 5 в этот момент сообщены со сливом трубопроводами 12, 14 и распределителем 8. Для поворота влево включается левый механизм 3. Рабочая жидкость от механизма 3 по трубопроводу 9, полости А распределителя 8, трубопроводу 12 поступает в иолость К гидроцилиидра и перемещает поршии /5, 16 в правую сторону, которые осуществляют одновремениый поворот рулей влево. Предложенная гидравлическая система управления позволяет без усложиеиия приемов управления, без увеличения количества органов управления обеспечить одновременный поворот рулей в правую или левую сторону при вращепии винтов в одну сторону (на режимах «передний ход или «задний ход), а также поворот рулей к диаметральной плоскости плавсредства при работе винтов «враздрай. Это уменьшает радиус поворота плавающего средства при работе винтов «враздрай. При этом улучшается управляемость плавсредства, повышается маневренность, средняя скорость движения на воде, устойчивость от разворота и сноса течением при швартовке. Формула изобретения Гидравлическая система управления плавающим средством, содержащая механизмы управления рулями, связанные через золотниковый распределитель с механизмами управления винтами и гидроцилиндром, отличающаяся тем, что, с целью упрощения управления плавсредством па режиме крутого поворота и повышения скорости поворота, гидроцилиндр снабжен двумя поршнями, образующими три полости, а золотниковый распределитель выполнен трехиозициониым с двумя полостями управляющего давления.
связанными с выходами механизмов управления винтами, при этом средняя полость гидроцилиндра связана с механизмами управления рулями посредством трехпозиционного золотникового распределителя.
Источник информации, принятый во внимание при экспертизе:
1. О. Р. Дубровский, Б. А. Руфии. «Гидравлические приводы судовых механизмов, Л., Судостроение, с. 367-369, 69.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая система управления плавающим средством | 1976 |
|
SU612850A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| Устройство для скалывания льда | 1984 |
|
SU1162892A1 |
| Колесное транспортное средство | 1987 |
|
SU1428607A1 |
| СПОСОБ ПОВОРОТА ДВИЖИТЕЛЯМИ И УСТРОЙСТВО РУЛЕВОЕ ТРАКТОРА | 2010 |
|
RU2430851C1 |
| Привод подач шлифовального станка | 1988 |
|
SU1664534A1 |
| РУЛЕВАЯ СИСТЕМА ПОВОРОТА БАЛКИ МОСТА И ПОЛУРАМ ТРАКТОРА | 2014 |
|
RU2555875C1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| Транспортное средство | 1988 |
|
SU1555149A1 |
