(54) ИНДУКЦИОННЫЙ КОМПАС
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКЦИОННЫЙ КОМПАС | 1994 |
|
RU2084824C1 |
| МАГНИТНЫЙ КОМПАС | 2001 |
|
RU2239787C2 |
| МАГНИТНЫЙ КОМПАС | 2005 |
|
RU2289786C1 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2372587C1 |
| МАГНИТНЫЙ КУРСОУКАЗАТЕЛЬ ДЛЯ СКОРОСТНЫХ СУДОВ | 2013 |
|
RU2531059C1 |
| Гироскопическое устройство | 1958 |
|
SU120343A1 |
| Устройство для определения полукруговой девиации компаса | 1977 |
|
SU742709A1 |
| УСТРОЙСТВО ДЛЯ ЗАДАНИЯ ПЛОСКОСТИ ГОРИЗОНТА | 1995 |
|
RU2097698C1 |
| Компас | 1973 |
|
SU468087A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
1
Изобретение относится к дистанционным магнитным компасам с чувствительными элементами в виде феррозондов.
Известны индукционные компасы, где в качестве чувствительного элемента используют два ортогонально расположенных феррозонда, укрепленных в карданном подвесе, для стабилизации которого в плоскости горизонта используют комбинированные маятники, состоящие из груза и поплавка, а для демпфирования его помещают в сосуд с демпфирующей жидкостью l, В качестве компенсатора девиации объекта, на котором установлен компас, используют электромагнитные компенсаторы в виде
колец Гельмгольца,
Цель изобретения - повыщение точности индукционного компаса.
Указанная цель достигается тем, что один из феррозондов помещен в подвижную обойму с возможностью разворота относительно неподвижного феррозонда. Феррозонды расположены в непосредственной близости друг над другом симметрично относително точки пересечения осей карданного подвеса параллельно осям балансировочных винтов. Сборка внутреннего кольца карданного подвеса имеет нулевую плавучесть в поддерживающей жидкости, а внутренная полость между стаканом внутреннего кольца карданного подвеса и подвижной обоймы частично заполнена вязкой жидкостью.
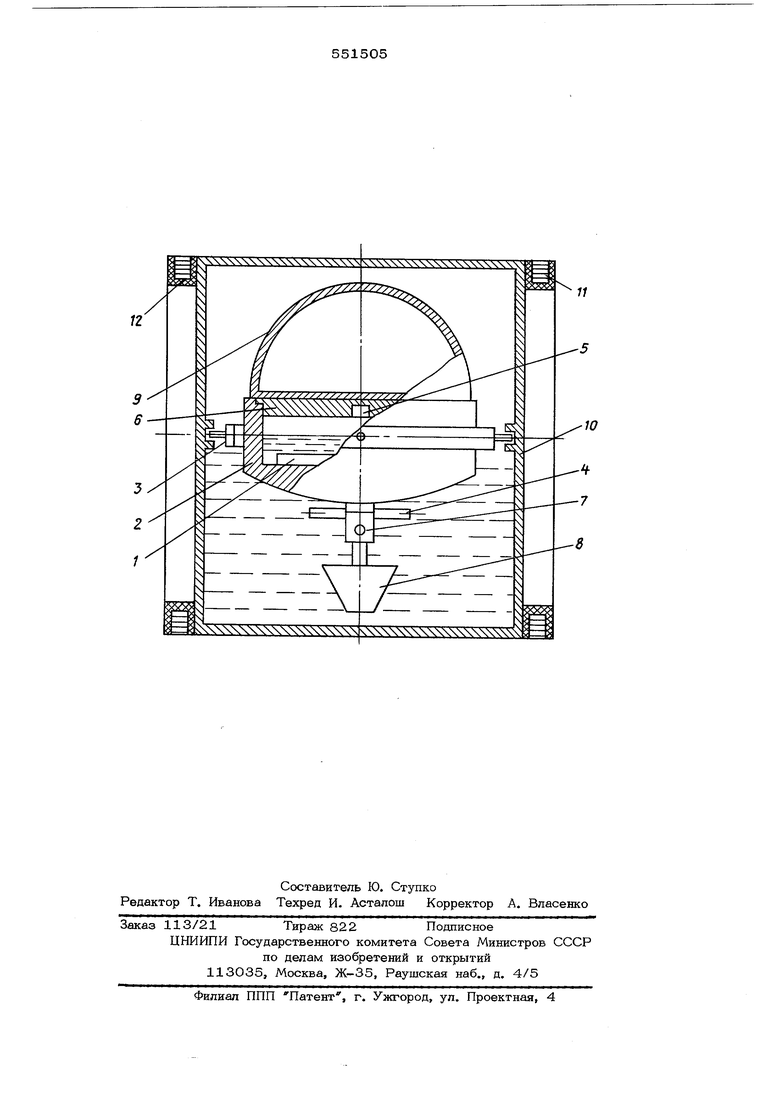
На чертеже изображен индукционный компас, разрез.
Феррозонд 1 неподвижно закреплен в стакане 2, являющимся вн тренним кольцом карданного подвеса 3, параллельно оси балансировочного винта 4, Феррозонд 5 закреплен в обойме 6, которая может разворачиваться в стакане 2 по цилиндрической проточке. Феррозонд 5 параллелен оси балансировочного винта 7. Груз 8 и поплавок 9 служат для удержания магнитных осей феррозондов 1 и 5 в плоскости горизонта. Сборка карданного подвеса помешена в корпус 1 и, заполненный поддерживающей и демпфирующей жидкостью. Корпус 10 охватывают электромагнитные катушки 11 и 12 для компенсации продольной составляющей девиации (катущка для компенсации поперечной и вертикальной составляющих девиации на чертеже не показаны). Для согласовани ортогональности магнитных осей в сборке карданного подвеса служит подвижная обойма 6. Розворотом обоймы 6 с феррозондом 5 относительно стакана 2 и неподвижного феррозонда 1 добиваются ортогональности магнитных осей феррозондов 1 и 5. Обойма 6 с феррозондом 5 перед установкой в сборку подвергается балансировке относительно вертикальной оси и при развороте не нарушает балансировки карданного подвеса, а оси феррозондов 1 и 5 остаются в параллельных плоскостях. Для балансировки (приведения магнитных осей феррозондов в плоскость горизонта) служат балансировочные винты 4 и 7, оси которых параллельны магнитными осям феррозондов 1 и 5, чем обеспечивается раздельная балансировка. Узел стакана 2 имеет в поддерживающе жидкости нулевую плавучесть. Этим обеспечивается отсутствие контактного давления в подшипниках внутренней оси карданного подвеса и незначительное контактное давление в подшипниках наружной оси карданного подвеса. Разгрузка осей позволяет применить приборные шарикоподшипники с малыми внутренними и наружными диаметрами, а значит, с малыми моментами собственного трения. Отсутствие дополнительног контактного давления, вызванного весом указанной сборки, приводит к тому, что моменты т ния в опорах карданного подвеса равны моментам трения в подшипниках. Это приводит к малому застою, а значит, и к малой погрешности компаса, вызванной статической разбалансировкой. Маятник из груза 8 и поплавка 9 вследствие ограниченных раз
меров плеча и малых линейных скоростей при наклоне имеет малый период собственных колебаний и большое время успокоения. Для сокращения времени успокоения полость между стаканом 2 и подвижной обоймой 6 частично заполнена вязкой жидкостью, например полиэтилсилоксановой.
няя полость стакана частично заполнена демпфирующей жидкостью, например полиэтилсилоксановой.
Источники информации, принятые во внимание при экспертизе:
