1 . ... Изобретение относится к автоматическому управлению промышленными и транспортными техническими системами, в частности, судовыми системами автоматического регулирования. На морских судах i иавео Т0Н ряд систем регулирования, обладающих экстремальными характеристиками, и, следовательно, допускающих использотание экстремальных регуляторе. Известны многочисленные описаиия экст ремальных регуляторов шагового типа в i технической и патентной литературе l, 2 . Здесь списаны экстремальные регуляторы различных модификаций, предназначеиные для управления одним определенным обьек:ттл. Если применить любой из описанных регуляторов для управления объектами, расположеиными относительно близко один от другого, например, на морском судне, то придется для кахшой системы управления иметь отдельный экстремальный регулятор. Такое решение весьма, нерационально технически и акономичесжи, особенно если учесть что экстремальный регулятор будет работать эпизодически. Аналогичными недостатками обладает и экстрекгальный регулятор шагового типа, содержащий последовательно соединенные между собой блок оптимизации, коммутатор и блсж программных генераторов з . Цель изобретения состоит в создании экстремального регулятора шагсжого типа, , пригодного для управления несколькими системами автоматического регулирсжания, объединенными территориально (например, системами регулирования морского судна). Предлагаемый экстремальный регулятор отличается тем, что он содержит командный блок, первый вход которого подключен к выходу коммутатора, второй и j третий вхо ды - к выходам блока оптимизации, первый выход Подключен к соответствующему входу коммутатора, а вторс выход подключен к входу блока оптимизации, а также тем, что командный блок состоит из двух триггеров, четырех элементов И, элемента ИЛИ, четырех ре;ю задания начальных условий, кнопки Пуск, электромагнитного исполн1П;л1,нЛУ роле и элеквэнта подключения, (и.,1х:)ды которого подключены х первому и вгор./му входам бпсжа, а выход соединен с гтоследовя-п: г:ьчо соединенными триггерами, входы кот0)ых соединены с кнопкой Пуск., а выходы со входами элементов И, выходы которых соединены с первым выходом блспе и с обмотками репе задания начальных услсжий, а второй и третий выходы соединены со входом элемента ИЛИ, выход котороро нопключен .к обмотке электромагнитного иснолнительного реле, через контакты которого третий вход блока соединен со вторым его выхоаом.
На чертеже изображена схема устройст- ва..
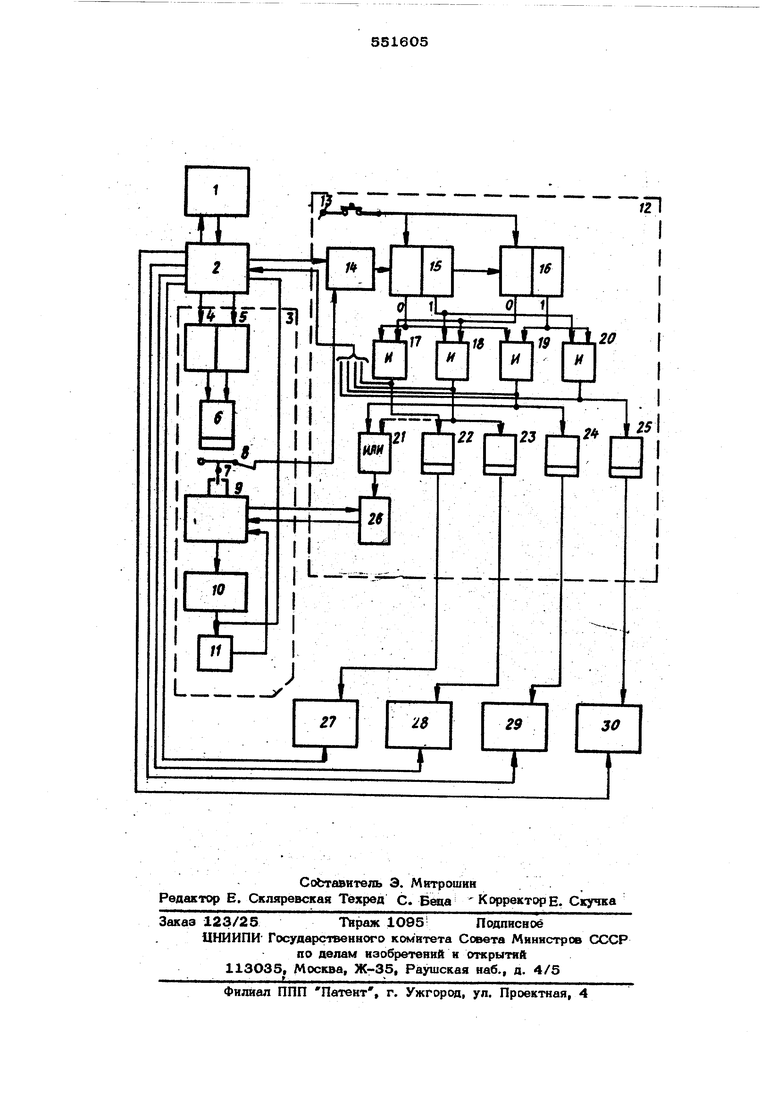
Оно содержит блеж программных генераторов 1, коммутатор 2, блок оптимиза НИИ 3, запоминалощие ячейки 4, 5 блока оп THNniaaiiKK, поляризованное реле 6 с перек- лючаюишм 7 и расзмыкающим 8 контактами, деижфраторную матрицу 9 на диодах, испол 1ительные реле 1О, схему запоминания знака 11 при решении регулируемого параметр командный блок 12, кнопку 13 Пуск, эле мент переключения 14, триггеры 15-18, элементы И 17-20, элемент ИЛИ 21, реле задания начальных условий 5, электромагнитное исполнительное реле 26, объекты управления 27-30.
В общем случае количество программных генераторов в блоке 1 может быть равно числу Объектов управления; в частиом cjjyчае, когда временные параметры двух или более объектов управления совпадают, количество программных генераторов может быть меньше числа управляемых блоком оптимизации систем.
Командный блок 12 и коммутатор 2 преставляют собой электронные или электроме. ханические системы, осуществляющие подключение к блоку оптимизации 3 определенной группы элементов схемы по заданной программе.
Без ограничения общности, положим, что
экстремальный регулятор управляет четырьмя объектами 27, 28, 29, 30, воздействуя на серводвигатель, устанавливающий величину настроечного параметра системы,
Для большей конкретности .и простоты описания принято, что экстремальный регулятор управляет четырьмя объектами управления, причем для- 1 и 1У объектов (поз. 27 и 29) система настраивается на поиск минимума функнии оценки качества, а для И и II объектов (поз, 28 и ЗО) на 1ГОНСК максимума.
11|)ч уволичонни числа управляемых эксг ||.-Мг::1Л1Л(ым ь-гуля г yjiJS) систем количество
a.ieNf€-HT.«i ком/ишногч) усл-цсли-гил ;у.)гвотствеино увеличивается.
Команда на регулятор больше или меньше (т.е. увеличить или уменьшиrij значение регулируюшегО пара 1етря /} ), вырабатывается в зависимости от соотношения знаков приращений оценки качества Q и регулирующего параметра f(J . Таким образом, блок оптимизации содержит узлы, вырабатывающие знаки соответствующих приращений sigTi Q и eigfn/j . Когда величина измерения оценки качесгва|дО ); (где - заданная величина), процесс настройки на экстремум считается око1гченным, в этом случае блок оптимизации 3 выдает в командный блок 12 соответствующий сигнал.
При рассмотрении работы устройства не описаны блоки питания, защиты и сигнализации.
Пуск в работу осуществ.пяется путем нажатия кнопки Пуск 13. Триггеры командного устройства 15, 16 установятся в положение О О. Срабатывает логический элемент И, включает реле задания начальных условий 22, которое через контакты блоха программных генераторов 1 подает начальный заряд в конденсатор зал оминающей ячейки 5, а через другие контакты запустит в действие соответствующий программный генератор. Начнется вывод на оптимальный режим первого объекта управления 27. При выводе объекта управления на экстремальное значение показатеЛгя качества, в случае, когда абсолютное значение приращения показателя качества €) при изменений управляющего воздействия JU превышает заданное значение | Д Q / « ..Jj6,TO поляризованное реле 6, срабатывая, контактами 7 выдает в дешифра- .орную матрицу 9 сигнал Sig л Q . Если же / U Q I 6 I то размыкающий контакт 8 через соответствующие контакты программного генератора выдает сигнал настройка окончена.
Работа командного блока 12. Сигнал настройка окончена вырабатывается элементом переключения 14 на следующий объект, при условии, когда сравнение Q образует разность jiQl , Этот сигнал поступает на вход триггерного счетчика 15-16;переводя его в положение 1-0. При этом срабатывает элемент И 18 и выдает команду на коммутатор 2 подкл.ючить к оптимизатору объект управления 28 и соответствующий программный ге нератор в блоке программных генераторов 1, Одновременно реле задания начальных ус;1овий 23 установит значение нача;1ЬН11 условий в блоке ипти(и;лаинн 3, а .M(in ИЛИ 21 определит, что следует nacri зивоть объект управлоияя 28 на максимум показателя качества. По сигналу логического элемента ИЛИ 21 электромагни ное реле 26 произведет соответствующее переключение в схеме дешифраторной матр цы 9. Начинается работа оптимизации блока поиск экстремума (максимума) показателя качества второго объекта 28. Окончание поиска фиксирует поляризованное реле 6 командный блок 12 осуществляет соответствующую настройку блока оптимизации 3 и его подключение к следующему объекту управления. Технико-экономический эффект от приме нения предлагаемого устройства возникает за счет того, что оно позволяет для нескольких различных объектов управления использовать один блок оптимизации 3, один коммутатор 2, один блок программных генераторе. Реализация изобретения позволяет умен шить количество используемого оборудования и увеличить интенсивность его использования. Такой экстремальный регуля ЭОр может быть весьма полезен, наг ример, для управления судовыми системами. Применение предлагаемого регулятора будет более эффективно технически и экономически, чем использование оптимизаторов для каждого объекта управления в отдельности. Ф о р м у ji ia и аобре тения 1. Экстремальный регулятор щагового типа, содержащий последовательно соедине ные блок оптимизации, коммутатор и блок программных генераторов, о т л и ч а ю- 1д и и с я тем, что, с целью расширения функцион льных возможностей регулятора он содержит командный блок, первый вход которого подключен к выходу коммутаторя, второй и третий входы - к выходам блока оптимизации, первый выход подключен к соответствующему входу коммутатора, а второй выход подключен к входу блока оптимизации. 2. Экстремальный регулятор по п. 1, отличающийся тем, что командный блсж состоит из двух триггеров, четырех элементов И, элемента ИЛИ, четырех реле задания начальных условий, кнопки Пуск, электромагнитного исполнительного реле и элемента переключения, выходы которого подключены к первому и второму входам блока, а выход соединен с последовательно соединенными триггерами, входы которых соединены с кнопкой Пуск, а выходы « с входами элементов И, выходы которых соединены с первым выходом блока и с обмотками реле задания начальных условий, а второй и третий выходы соединены со входом элемента ИЛИ, выход ко-торого подключе н к обмотке электромагнитного исполнительного реле, через контакты которого третий вход блока соединен со вторым его выходом. Источники информации, принятые во внимание при экспертизе: 1,.Суевалов Л. Ф. Самонастраивающиеся системы в судовой автоматике , Судостроение, 1966. 2.Либерзон Л. М., Родов А. В Шаговые экстремальные системы , Энергия, 1969. 3. Чинаев П. И. Самонастраивающиеся системы . Справочник-Иаукова думкп. . J v; iv« xJi , ..J Утпг1Ж 11 Киев, 1969, (прототип).
1
п
iT
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Многоканальное устройство для прог-РАММНОгО упРАВлЕНия | 1979 |
|
SU802929A1 |
| Система оптимизации режимов работы объекта | 1985 |
|
SU1287103A1 |
| Устройство для регулировки электромагнитной системы двухобмоточных поляризованных реле | 1982 |
|
SU1072135A1 |
| Цифровая система для программного управления двигателем | 1986 |
|
SU1320793A1 |
| Программный регулятор температуры | 1978 |
|
SU809106A1 |
| Устройство для тестового контроля цифровых блоков | 1987 |
|
SU1545222A1 |
| Устройство для контроля функционирования логических блоков | 1987 |
|
SU1432528A2 |
| Способ определения параметров передаточной функции линейного динамического звена и устройство для его осуществления | 1986 |
|
SU1377826A1 |
| Индукционная плавильная установка | 1984 |
|
SU1436285A1 |