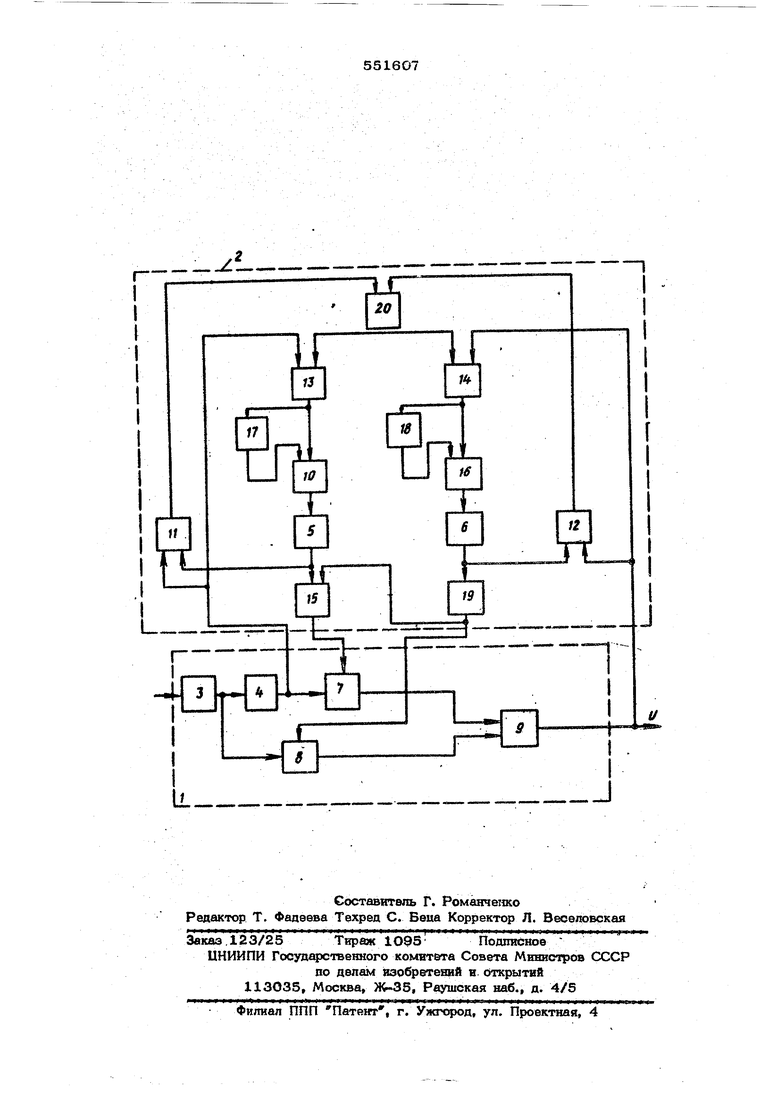
(54) АДАПТИВНЫЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР ДЛЯ ИНЁРЦИОНМЫХ ОБЪЕКТОВ тем, что критерий настройки форк1ирувтся по мгновенному значению рассогласования. Целью изобретепия является повышение быстропействия и точности устройства. Это достигается тем, что в регуляторе устпноплея второй блок измененип масштаба, причем входы блока сравнения соединен сог/гвйтственно череа второй блок умножения с выходами первого и второго интеграторов и через третий блок умножения с вы ходами сумматора и третьего интегратора, а выход - с первыми входами четвертого я пятого блоков умножения, второй вход чотвертого блска умножения соединен с выходом первого интегратора, а выход - со входом первого блока изменения масштаба и со вторым входом первого блока умножения, выход которого через последовательно соединенные второй интегратор и шестоЛ блок умножения соединен с управляюним входом второго усилителя, второй вход пятого блока умножения соединен с выходом сумматора, а его выход непосредственно и через второй блох изменения масштаба соединен с соответствуклянми входами седьмого блока умножения, выход которого через последовательно соединенные третий интегратор и делитель соединен со вторым входом шестого блока умножения и управля шим входом первого усилителя. На чертеже приведена блок-схема предлагаемого регулятора, где приняты следуююие обозпаче1шя: йюк формирования сигт нала управления 1, блок настройки 2, измеритель рассогласования 3, первый, второй и третий интеграторы 4, 5 н 6, первый и второй усилители 7 и 8, сумматор 9 первый, второй, третий, четвертый, пятый, игестой и седьмой бжжн умножения 1&-1в, первый и второй блоки изменения масштаба IT и 18, делитель 19 и блок сравнения 20. Адаптивный регулятор работает следующим образом, Блок 1 по замеряемому зн гчению ошибки регулир(жания f с помощью блоков 4,7, 8 и 9 формирует управляющее воздействие по ПИ-закону. Коэффициенты при пропорциональной и интегральной составляющих {KI и Kj, соответственно) раиваются автоматически по Критерию Q минимума среднеквадратичного отклонения регулируемой величины от заданной. С помощью блоков 10, 11, 12, 13 и 20 формируется градиент по настраиваемым параметрам, который в оптимальной точке должен быть равен нулю по условию минимума Q в этой точке. Это требование реализуется соответствующим непрерывным подбором вспомогательных величины Ни 351 Т) , Величины к. ввеены для упрощения схемы устройства. Пееход к коэффициентам К и К производитя с по го1иью делителя 19 (К i / N ) блока 15 (Kg KJ п ). Величины AJ и А 2 уточняются в процессе регулирования (в частном случае А j и Aj константы). Они формируются блсжами 17 и 18 соответственно. Аналитически схему работы предложенного устройства можно описать следующим образом. Принятый в адаптивном регуляторе ПИ-закон управления имеет вид fecDdt Откуда выражение для текущей ошибки Ка Ci) -:r-Ti )dt (1) J Критерий, основанный на исп)Льзовании квадрата отклонения (fc) , можно выбрать как tiг 6)tt)) ±и-.- jiCDdt TninK.Kj (2) Предположив - Ми К TJ на выражения(2) легко определить ЛИ /5N и дО/Эп , равенство нулю которых является условием минимума Q(i) . Для нахождения оптимальных в смысле выбранного критерия Q значений М и я можно воспользоваться непрерывным аналогом градиентного метода и алгоритм для нахождения значений парметров можно удет представить в виде ак эо дп 3 3N i ТТ t N«-fA,ffdi . Откуда: Реализация атих выражений в предлоенном устройстве осуществляется следуюим образом: з выражения (2) |(()dr))dir, 0to оэтому из интеграторов 4 и 5 в усилиель 8 поступах т и перемножаются сигнаы |6Cf)cIT и 71 . В делителе 20 этот ИГ1ШЛ с обратным знаком сумм1фует я с Nn из блока 11. В блоке 12 реультат из делителя 2О умножается на )dT, т.е. окончательно формируетс Далее в блоке 17 по величинеЭр/ формируется параметр Aj перемножающи с JQ/ЗП в блоке 14, а в интеграторе 5 интегрированием определяется величина n.-jA, Параметр А ., может формирс аться ан логично выражению (З) но с коэффициентом у (i) таким, что ОООО yj(t)0; / f.(-t)d-i oc-f.(lM Закон (4) и (S) позволяет находить искомые параметры с любой точностью. П раметр N формируется аналогично. С целью подтверждения эффективности предлагаемого устройства была проведена сравнительная оценка предложенного адаптивного регулятора с известным. Оценка проводилась путем моделирования систем автоматического регулирования (САР) на ЭВМ Минск-32. Исследсдаания показали, что точность регулирования увеличивается в четьфе раза и быстродействие в полтора раза. Формула изобретения Адаптив ный hp оп орци ональн о-и нте гралыный регул51тор для инерционных объекте, содержащий измеритель рассогласования, выход через первый усилитель и последовательно соединенные первый инте- гратор и второй усилитель соединен с со ответствующими входами сумматора, второй и третий интеграторы, блоки умножения, бло.с сравнения, делитель и первый блок изменения масштаба, выход ксггорого соединен с первым входом первого блока умножения, отличающийся тем, что, с целью повышения быстродействия и точности регулятора, в нем установлен второй блок изменения масштаба, причем входы блока сравнения соединены соогветстве1Шо через второй блок умножения с выходами первого и второго интеграторов и через третий блок умножения с выходами сумматора и третьего интегратора, а выход - с первы ми входами четвертого и пятого блоков умножения, второй вход четвертого блока умножения соединен с выходом первого интегратора, а выход - со входом первого блока изменения масштаба и со вторым вхо дом первого блока умножения, выход которого через последовательно сседииепные второй интегратор и шестой блок умножения соединен с управляющим входом второго усилителя, второй вход пятого блока умножения соединен с выходом сумматора, а его выход непосредетоенно и чорез второй блок изменения масштаба соедниен с соответствующими входами седьмого блока умножения, выход которого через поспедовательно соединенные третий интегратор и делитель соединен со вторым входом шестого блока умножения и управляющим входом первого усилителя. Источники информации, принятые во внимание .при экспертизе: 1. Авторское свидетельство СССР № 328433, М.Кл. QO5 В 17/02, 15.Об.70. 2. Авторское свидетельство СССР N9 370586, М.Кл.005 В 13/02, 1972. 3. Авторское свидетельство СССР № 375625, М.Кл. О5 В 13/О2, 1072 (прототип).
..
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Пропорционально-интегральный регулятор | 1979 |
|
SU798707A1 |
| Система адаптивного управления параметром технологического процесса | 1988 |
|
SU1620989A1 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565490C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| АДАПТИВНАЯ СИСТЕМА С ПЕРЕМЕННОЙ СТРУКТУРОЙ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ ПОДВОДНОГО РОБОТА | 2002 |
|
RU2215318C1 |
| Адаптивная система управления процессом стерилизации | 1985 |
|
SU1332261A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2396586C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2385480C1 |
| Адаптивный следящий электропривод | 1988 |
|
SU1500991A1 |