Изобретение относится к автоматике и может быть использовано в системах управления технологическими процессами с паременньми параметрами например -в системах управления процессами стерилизации пищевых продуктов.
Целью изобретения является обеспечение высокого качества функционирования системы управления при измене-. НИИ в широких диапазонах параметров управляющих сигналов,
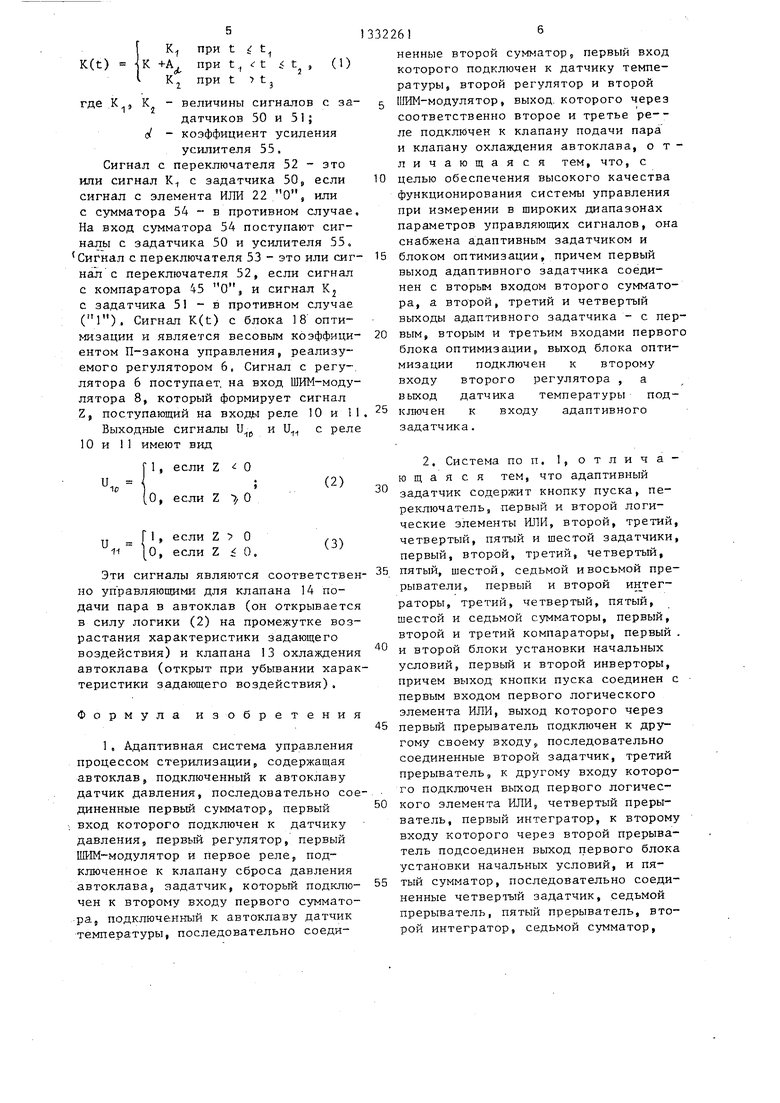
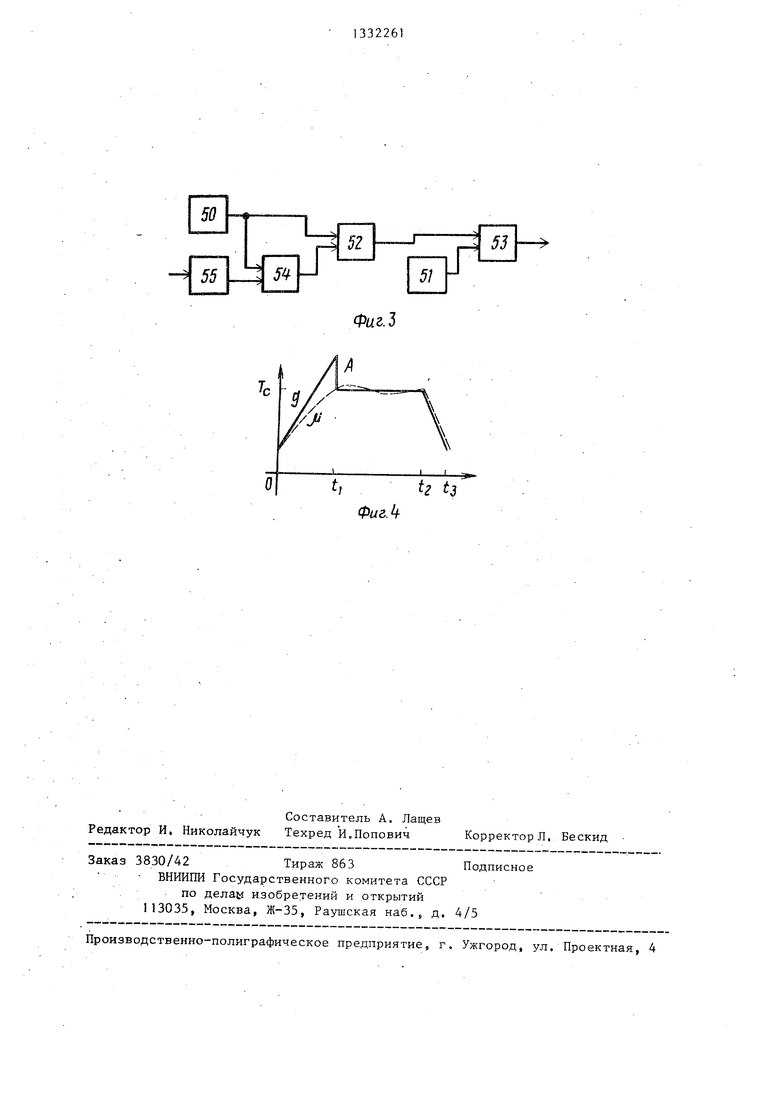
На фиг, 1 представлена функциональная схема системы; .на фиг. 2 и 3 - возможные варианты реализации адаптивного задатчика и блока опти- .мизации соответственно; на фиг. 4 - зависимость выходного сигнала задатчика от времени и сигнала с датчика температуры автоклава.
Система содержит автоклав 1, подключенные к нему датчик 2 температуры и. датчик 3 давления, сумматоры 4 и 5р регуляторы 6 и 7, ШИМ-модулято- ры 8 и 9, реле 10 - 12, клапан 13 охлаждения автоклава, клапан 14 подачи пара, клапан 15 сброса давления автоклава, задатчик 16, последовательно соединенные адаптивный задатчик 17 и блок 18 оптимизации. Последовательно соединены задатчик 16, сз мматор 5, к второму входу которого подключен выход датчика 3 давления, регулятор 7, ШИМ-модулятор 9, реле 12 и клапан 15 сброса давления автоклава, другой вход которого соединен с автоклавом 1, Последовательно соединены также датчик 2 температуры, адаптивный задатчик 17, блок 18 оптимизации, ШИМ-модулятор 8, реле 10, клапан 14 подачи пара и автоклав 1, К входам сумматора 4, выход которого - второй вход регулятора 6, подключены выходы адаптивного задатчика 17 и датчика 2 температуры. Последовательно соединены ШИМ-модулятор 8, реле 11, клапан 13 охлажде- . ния и автоклав 1,
Адаптивный задатчик 17 содержит (фиг, 2) кнопку 19 пуска, переключатель 20, логические элементы ИЛИ 21 и 22, задатчики 23-27, прерыватели 28-35, интеграторы 36 и 37, сумматоры 38-42, компараторы 43 - 45, блоки 46 и 47 установки начальных условий, инверторы 48 и 49, Выход кнопки 19 пуска соединен с входом элемента ИЛИ 21, выход которого че0
5
0
5
0
5
0
5
0
5
рез прерыватель 28 подключен к другому входу элемента ИЛИ 21. Последовательно соединены задатчик 23, прерыватель 30, прерыватель 31, интегратор 36 и сумматор 40. Блок 46 установки начальных условий через прерыватель 29 подключен к второму входу интегратора 36, Выход элемента ИЛИ 21 соединен с вторым входом прерывателя 30, Выход задатчика 24 соединен с соответствующими входами переключателя 20 непосредственно и через последовательно соединенные сумматор 39, компаратор 44, Инвертор 48 и элемент ИЛИ 22, выход которого соединен с вторым своим входом. Второй вход сумматора 39 является входом адаптивного задатчика 17. Выход интегратора 36 через переключатель 20 подключен к первому входу сумматора 41, Второй вход сумматора 40 соединен с выходом задатчика 24, Последовательно соединены задатчик 25, прерыватель 34, прерыватель 32, интегратор 37, сумматор 42, компаратор 45, прерыватель 35, сумматор 38 и компаратор 43, Выходы задатчиков 26 и 27 подключены соответственно к вторым входам сумматоров 42 и 38, Выход элемента ИЛИ 22 соединен с вторым входом прерывателя 34,.Выход компаратора 43 соединен с другим входом прерывателя 32, кнопка 19 пуска - с входа1уси прерывателей 29 к 33, Выход компаратора 45 через инвертор 49 подключен к другому входу прерывателя 28. Вторые входы прерывателей 35 и 33 соединены соответственно с выходами сумматора 42 и блока 47 установки начальных условий, а выходы указанных прерывателей - соответственно с входами сумматора 41 и интегратора 37. Выходы блоков 40,41,22 и 45 являются соответствующими выходами адаптивного задатчика 17,
Блок 18 оптимизации содержит (фиг. 3) задатчики 50 и 51, переключатели 52 и 53, сумматор 54 и усилитель 55. Выход сумматора 40 блока 17 через усилитель 55 подключен к входу сумматора 54. Выход задатчика 50 соединен с входами переключателя 52 непосредственно и через сумматор 54, К третьему входу переключателя 52 подсоединен выход элемента ИЛИ 22 блока 17. В свою очередь выходы переключателя 52 и задатчнка 51 соеди- нены с входами переключателя 53, третин вход которого подключен к выходу компаратора 45, входящего в состав адаптивного задатчика 17.
Регулятор 6 представляет собой П-регулятор с перестраиваемым весовым коэффициентом. Его возможная реализация - последовательно соединенные усилитель и множитель, второй вход которого соединен с выходом блока 18 оптимизации.
Система работает следующим образом.
Для управления автоклавом создано два контура управления. Контур регулирования по давлению состоит из автоклава 1, датчика 3 давления, сумматора 5, задатчика 16, регулятора 7, ШИМ-модулятора 9, реле 12 и клапана 15 по сбросу давления. По сигналу ощибки рассогласования, получаемой на выходе сумматора 5 как разность сигналов с датчика 3 давления, автоклава 1 и задатчика 16, на выходе регулятора 7 реализуется непрерьшный П-закон регулирования, который становится дискретным с помощью ШИМ-модулятора 9 и реле 12, Сигнал с реле 12 является управляющим для клапана 15 по сбросу давления ав.токлава (он позволяет спустить часть воды из автоклава в емкость). Контур регулирования по температуре состоит из блоков 1,2,4,6,8-11,13, 17 и 18, По сигналу ошибки рассогласования, получаемой на выходе сумматора 4 как разность сигналов с датчика 2 температуры и адаптивного задатчика 17 (сигнал с сумматора 41) регулятором 6 формируется -сигнал, соответствующий П-закону регулирования. Зависимость выходного сигнала адаптивного задатчика 17 от времени и сигнала с датчика 2 температуры имеет вид, изображенный на фиг, 4,
Задатчик 17 работает следующим образом,
В момент включения кнопки 19 пуска устанавливаются начальные значения на интеграторах 36 и 37, на выходах элемента ИЛИ 21, компараторов 44 и 43 - 1, на выходах компаратора 45 и элемента ИЛИ 22 - О, Сигнал с задатчика 23 по цепи (30, 31) поступает на вход интегратора 36, На фиг, 2 размыканию соответствует О, за исключением работы прерывателя 31. Цепь задатчик 23 - интегратор 36 размыкается до конца процес32261
са прерывателем 31 с момента t., когда температура в автоклаве впервые достигает значения температуры стерилизации Т, задаваемой сигналом с задатчика 24. После размыкания на выходе сумматора 40 получается сигнал , по величине (А) равный разности сигналов с интегратора 26 и
10 задатчика 24, Выходной сигнал с переключателя 20 - сигнал с интегратора 36, если элемент ИЛИ 22 вьщает сигнал 1, и сигнал с задатчика 24 - в противном случае,
15 Цепь задатчик 25 - интегратор 37 замкнута с момента времени t, и сигнал с задатчика 25 тогда поступает на вход интегратора 37, Сигнал рассогласования между сигналами с ин20 тегратора 37 и задатчика 26 формируется сумматором 42. В момент t.,, момент равенства сигнала рассогласования нулю, сигнал компаратора 45 с логического О меняется на 1,
25 Время t t, - время поддержания температуры, настраивается с помощью задатчиков 25 и 26. В зависимости от знака сумматора 42 компаратор 45 вырабатывает сигнал на замыкание
30 (I) или размыкание (О) цепи сум- матор 42 - сумматор 41 (сумматор 38), На выходе сумматора 41 формируется сигнал рассогласования между сигналами с переключателя 20 и прерывателя 35. Этот сигнал является задающим сигналом
35
в контуре управления по температуре,
На основе сигнала рассогласования, получаемого сумматором 38 при размыкании цепи сумматор 42 - сумматор 38 как разность сигналов с задатчика 27 и сумматора 42, с помощью компаратора 43 определяется знак
5
этого сигнала и момент tj его изменения. Выбором значений сигналов
с задатчиков 25,26 и 27 можно добиться любой требуемой по технологии характеристики (фиг. 4) задающего воздействия на температуру, В момент tj сигнал с компаратора 43 размыкает с помощью прерывателя 32 цепь задатчик 25 - интегратор 37, и процесс стерилизации заканчивается.
Сигнал с сумматора 40 блока 17 поступает на вход сумматора 4, а сигнал с сумматора 40 - на вход усилителя 55 блока 18 оптимизации, выходной сигнал которого
1К при t t К +А при t,, t . t , (1) Kj при t tj
где ,К э К - величины сигналов с задатчиков 50 и 51; о/ - коэффициент усиления
усилителя 55.
Сигнал с переключателя 52 - это или сигнал К с задатчика 50 если сигнал с элемента ИЛИ 22 или с сумматора 54 - в противном случае. На вход сумматора 54 поступают сигналы с задатчика 50 и усилителя 55, Сигнал с переключателя 53 - это или сиг- нал с переключателя 52, если сигнал с компаратора 45 О, и сигнал К с задатчика 5 - в противном случае (1). Сигнал K(t) с блока 18 оптимизации и является весовым коэффициентом П-закона управления, реализуемого регулятором 6, Сигнаш с регу-. ятора 6 поступает, на вход ШИМ-моду- ятора 8, который формирует сигнал , поступающий на входы реле 10 и II, Выходные сигналы и U с реле 10 и 11 имеют вид
Г 1, если Z Q
..
,0, если Z О
(2)
.
Г 1 , если Z О о, если Z О,
(3)
Эти сигналы являются соответственно управляющими для клапана 14 подачи пара в автоклав (он открывается в силу логики (2) на промежутке возрастания характеристики задающего воздействия) и клапана 13 охлаждения автоклава (открыт при убывании характеристики задающего воздействия),
Формула изобретения
1, Адаптивная система управления процессом стерилизациир содержащая автоклав, подключенный к автоклаву датчик давления, последовательно соединенные первый сумматор, первый вход которого подключен к датчику давления, первый регулятор, первый ПП-ГМ-модулятор и первое реле, подключенное к клапану сброса давления автоклава, задатчик, который подключен к второму входу первого сумматора, подключенный к автоклаву датчик температуры, последовательно соеди616
ненные второй сумматор, первый вход которого подключен к датчику температуры, второй регулятор и второй ПШМ-модулятор, выход, которого через соответственно второе и третье ре-- ле подключен к клапану подачи пара и клапану охлаждения автоклава, отличающаяся тем, что, с
целью обеспечения высокого качества функционирования системы управления при измерении в широких диапазонах параметров управляющих сигналов, она снабжена адаптивным задатчиком и
блоком оптимизации, причем первый выход адаптивного задатчика соединен с вторым входом второго сумматора, а второй, третий и четвертый выходы адаптивного задатчика - с первым, вторым и третьим входами первого блока оптимизации, выход блока оптимизации подключен к второму входу второго регулятора , а выход датчика температуры подключен к входу адаптивного задатчика.
2, Система по п. 1, отличающаяся тем, что адаптивный задатчик содержит кнопку пуска, переключатель, первый и второй логические элементы ИЛИ, второй, третий, четвертый, пятый и шестой задатчики, первый, второй, третий, четвертый,
пятый, шестой, седьмой и восьмой прерыватели, первый и второй интеграторы, третий, четвертый, пятый, шестой и седьмой сумматоры, первый, второй и третий компараторы, первый .
и второй блоки установки начальных условий, первый и второй инверторы, причем выход кнопки пуска соединен с первым входом первого логического элемента ИЛИ, выход которого через
первый прерыватель подключен к другому своему входур последовательно соединенные второй задатчик, третий прерыватель, к другому входу которо- го подключен выход первого логического элемента ИЛИ, четвертый прерыватель, первый интегратор, к второму входу которого через второй прерыватель подсоединен выход первого блока установки начальных условий, и пятый сумматор, последовательно соединенные четвертый задатчик, седьмой прерыватель, пятый прерыватель, второй интегратор, седьмой сумматор.
71
третий компаратор, восьмой прерыватель, третий сумматор и первый компаратор, последовательно соединенные третий задатчик, четвертый сумматор, второй вход которого является входом адаптивного задатчика, второй компаратор, первый инвертор и второй логический элемент ИЛИ, выход которого соединен с своим вторым входом, и переключатель, причем выход третье го задатчика соединен с вторым входом, переключателя, выход первого интегратора через переключатель подключен к первому входу шестого сумматора, выход третьего задатчика сое динен с вторым входом пятого сумматора, выходы пятого и шестого за- датчиков подключены соответственно к вторым входам седьмого и третьего сумматоров, вькод второго логического элемента ИЛИ соединен с вторым
322618 .
входом седьмого прерывателя, выход первого компаратора соединен с вторым входом пятого прерывателя, а g выход кнопки пуска подключен к вторым входам второго и шестого прерывателей, выход третьего компаратора через второй инвертор подключен к второму входу первого прерывателя,
10 вторые входы восьмого и шестого прерывателей соединены соответственно с выходами седьмого сумматора и второго блока установки начальных условий, а выходы восьмого и шестого преры15 вателей - соответственно с вторыми входами шестого сумматора и второго интегратора, причем выходы пятого и шестого сумматоров, второго логического элемента ИЛИ и третьего
Q компаратора являются соответствующими выходами адаптивного задатчика .
50
5J
iT
Фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Бинарная система управления | 1988 |
|
SU1697054A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2572805C1 |
| Автоматическая и дистанционная система для управления судовым двигателем внутреннего сгорания | 1982 |
|
SU1078116A1 |
| Система торможения транспортного средства | 1986 |
|
SU1526570A3 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2265950C2 |
| Устройство для дозирования расплава | 1985 |
|
SU1308427A1 |
| УСТРОЙСТВО ДЛЯ ВОЗДЕЙСТВИЯ ЭЛЕКТРИЧЕСКИМ ТОКОМ | 1995 |
|
RU2090215C1 |
| УСТРОЙСТВО ПНЕВМАТИЧЕСКОГО НАГРУЖЕНИЯ ФЮЗЕЛЯЖА САМОЛЕТА ПРИ ПРОЧНОСТНЫХ ИСПЫТАНИЯХ НА РЕСУРС | 2015 |
|
RU2598778C1 |
Изобретение относится к автоматике и может быть использовано в системах управления технологическими процессами с переменными параметрами, например в системах управления процессами стерилизации пищевых продуктов. Нелыо изобретения является обеспечение высокого качества функционирования системы уп)авления при изменении в широких диапазонах параметров управляющих сигналов. Система содержит автоклав 1, подключенные к нему датчики температуры 2 и давления 3, сумматоры 4 и 5, регуляторы 6 и 7, ШИМ-модуляторы 8 и 9, . реле; 10-12, клапаны охлаждения автоклава 13, подачи пара 14 и сброса давления автоклава 15, задатчик 16, последовательно соединенные адаптивный задатчик 17 и блок оптимизации 18. 1 3,П. ф-лы, 4 ил, КолоЗная вода i 00 оэ ГС ГчЭ О)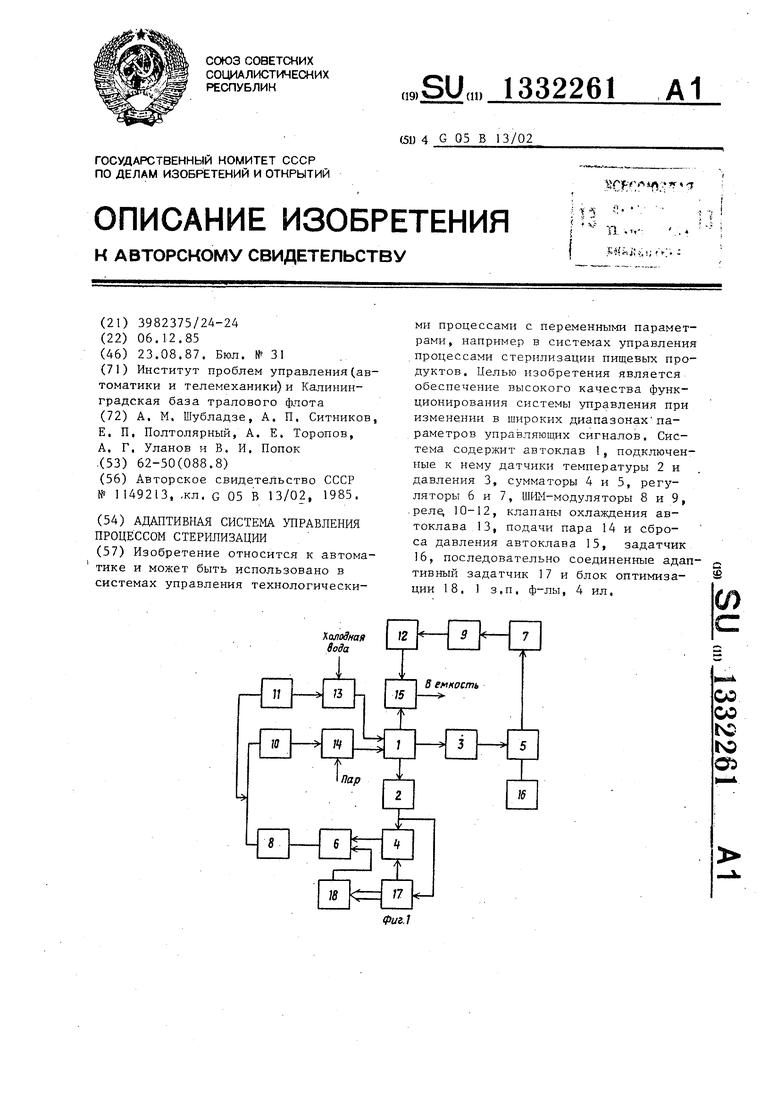
| Адаптивный регулятор | 1984 |
|
SU1149213A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
